KK-SWARM简介
项目简介
KK目标
开源机器人集群项目KKSwarm,由易科机器人实验室和阿木实验室联合匠心打造。
KKSwarm项目旨在为研究人员搭建一个高效、易用的集群研究平台。结合ROS强大的开源生态,让研究人员或者工程师能够快速上手开发。同时也兼顾到理论研究和工程落地之间的跨度,KKSwarm项目通过搭建轻量级的仿真环境,再通过参数拟合让仿真和真实环境一致,让仿真环境和真实环境高度匹配,可以实现多智能体等算法的直接过渡,配合上低成本的机器人集群,可以快速在物理环境中验证算法,以达到工程落地的目的。
KK由来
KK(Kilo Ken)Swarm,致敬Kevin Kelly机器社会进化论,一个奉行极简主义的自组织机器人集群,具有丰富的机器人功能,如视觉、控制、学习、协同。同时追求超低成本、超大规模,致力于使群 体智慧走进物理世界。众多低成本机器人互相连接,进而产生他们的信息交流和反馈,相互学习,产生 秩序,以达到集体目标,Kevin Kelly将其称为“群智涌现”。
项目功能
KKSwarm项目正在成长之中,目前已正式推出的功能有:
- 独创的全局视觉定位系统,为大规模机器人集群提供低成本、高精度定位服务;
- 提供基于
MATLAB/simulink仿真与算法开发环境,以及KKSwarm simulink模板,可一键生成ROS代码并部署至KKSwarm机器人系统; - 提供KKDeep深度强化学习Simulink模板,免去繁琐的环境配置,训练后控制器可一键生成代码部署至机器人集群;
- 提供ROS rviz在线可视化功能,直观展示集群运行情况;
- 提供Matlab ROS 日志分析功能,方便采集数据进行分析,提升研发效率;
- 支持虚拟雷达,低成本实现复杂分布式算法测试。
系统说明
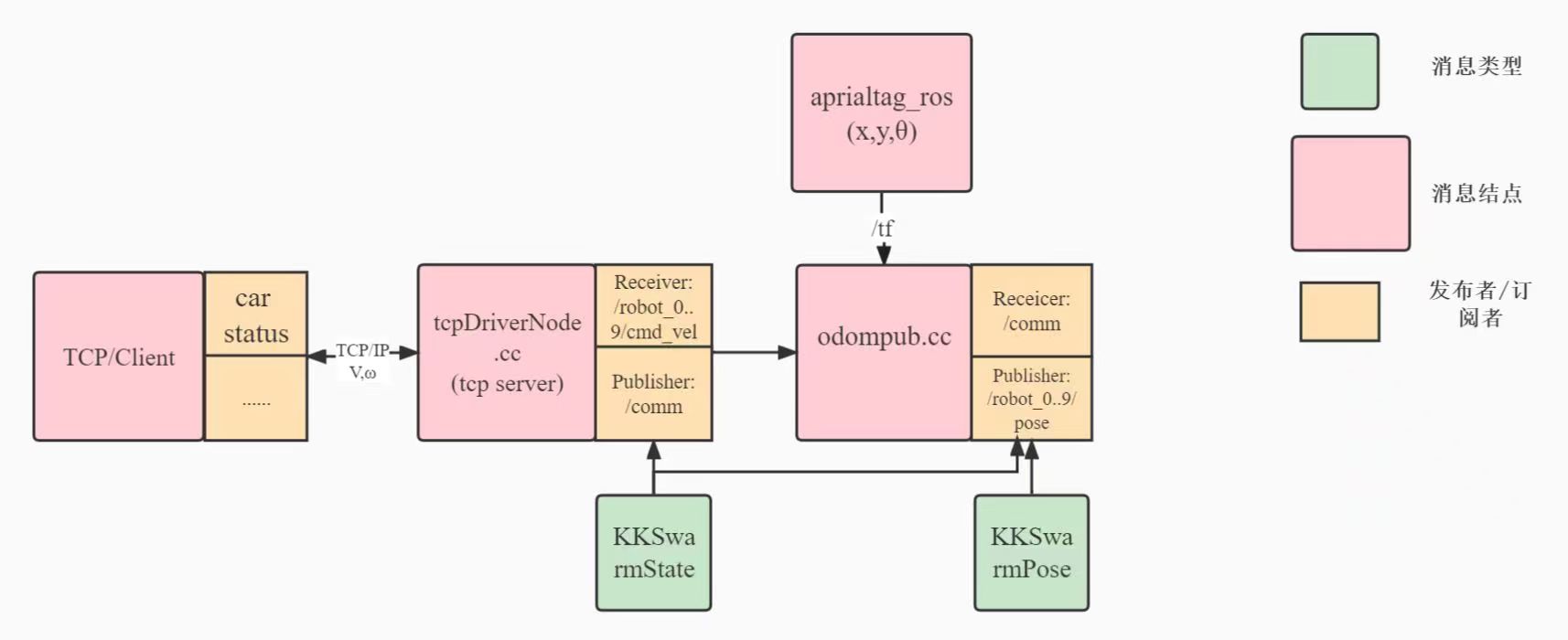
系统数据流向图
kkswarm项目通过路由器搭建局域网,集群小车为客户端。所有的算法和定位系统均在服务器主机上进行计算。然后通过TCP/IP协议,将控制指令发送给集群小车,从而控制小车的运动。同时主机服务器通过摄像机实时获取集群小车的位置和方向。
项目地址
https://github.com/kkswarm/kk-robot-swarm
KKSwarm软件框架
软件架构说明:
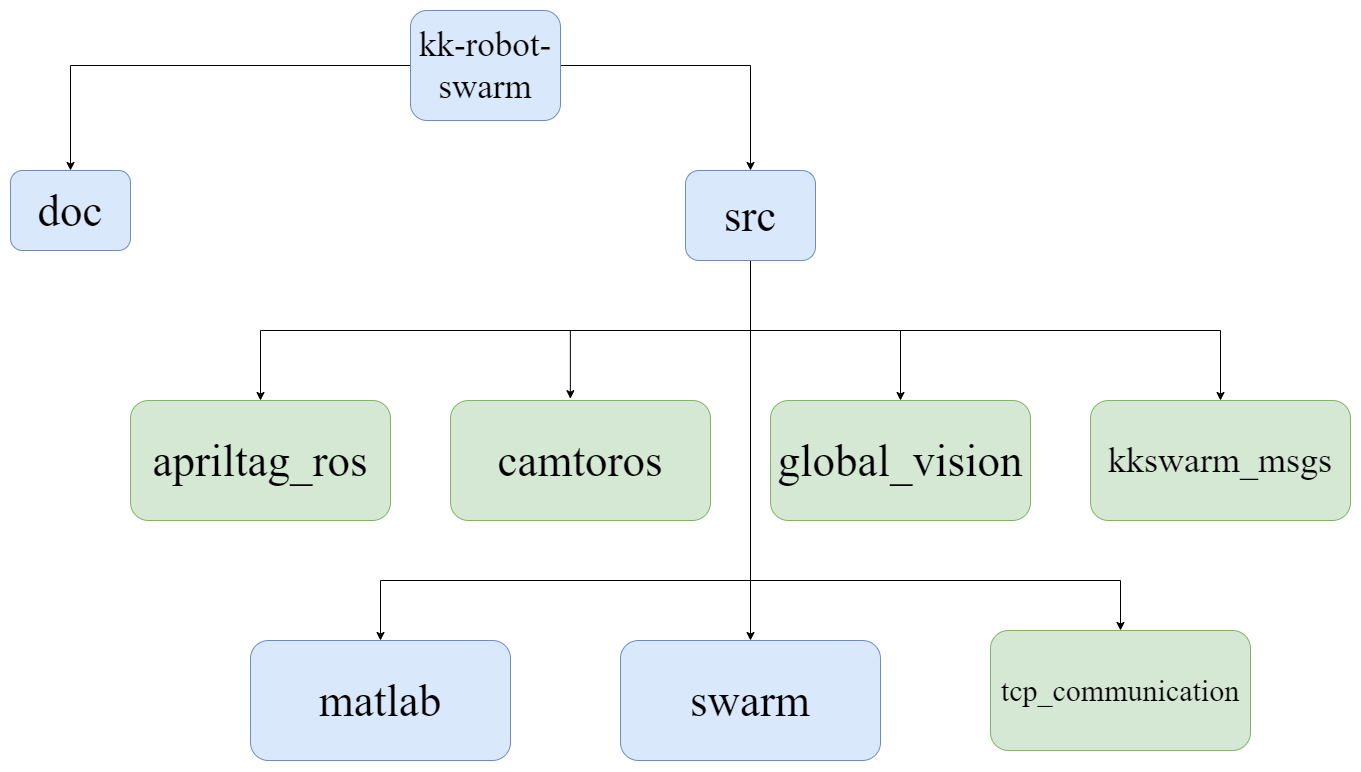
KKSWARM软件框架
- 图示说明:蓝色代表文件夹,绿色代表功能包
doc:该文件夹主要存放和kkswarm相关的论文以及其他文件和图片src:该文件夹主要存放ROS以及matlab代码apriltag_ros:功能包,提供AprilTag的ROS接口camtoros:功能包,提供海康威视相机的ROS接口global_vision:功能包,提供集群小车的位置和方向等数据kkswarm_msgs:功能包,提供kkswam项目使用的自定义ROS消息类型tcp_communcation:功能包,提供主机和集群小车的通信节点。用于接收小车状态信息和发送指令matlab:该文件夹下主要存放matlab相关仿真模块以及代码swram:该文件夹下主要存放由matlab生成的ROS功能包
产品参数
外形及尺寸

侧视图
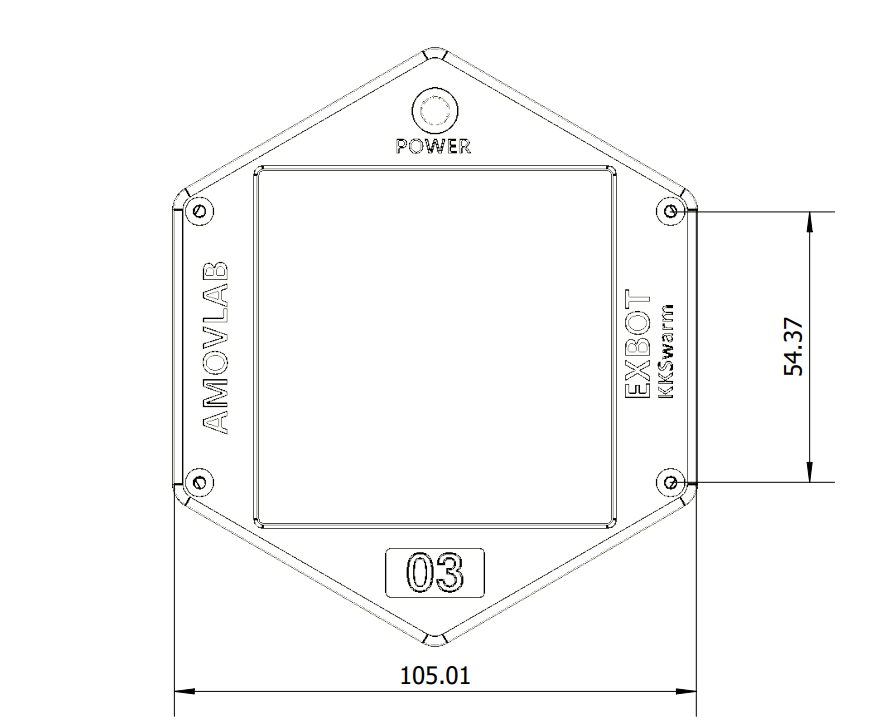
俯视图
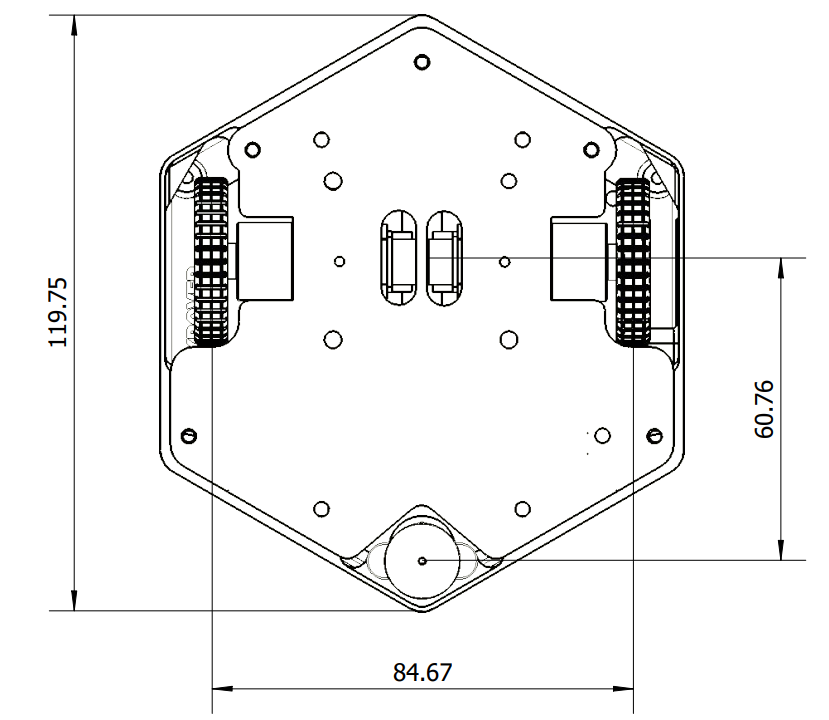
仰视图
小车性能参数
| 类型 | 参数 | 单位 |
|---|---|---|
| 外形尺寸 | 119.75 * 105.01 * 79.07 | 毫米 |
| 轮距 | 84.67 | 毫米 |
| 车轮直径 | 60.5 | 毫米 |
| 驱动方式 | 两轮差速 | / |
| 最大移动速度 | 0.6m/s | 米 / 秒 |
| 空载续航 | 3h | 小时 |
| 满载续航 | 2h | 小时 |