Z410-4B无人机使用教程目录
1.资料下载链接
-
missionplanner下载链接
-
ardupilot固件下载链接
-
PC端安装Ubuntu系统
2.Z410机型介绍
-
硬件接线图
-
硬件设备及用途简介
3.如何快速进行第一次解锁
4.如何进行第一次试飞
5.使用这台无人机需要具备的一些基础知识
6. 以后扩展开发方向
1.资料下载链接
-
1.1 Mission planner1.3.74地面站软件下载链接:
网盘下载链接https://pan.baidu.com/s/1ub2XQJ7YGztYZGEwaKLTjQ
提取码:x452
注意!
电脑最好是使用Win10系统,Win10以前的系统可能由于缺少必要的插件会导致启动失败。 -
1.2 Ardupilot(4.1.0)固件下载链接:
网盘下载链接https://pan.baidu.com/s/1P2wxKxNYV1nWzeKraLoVBg
提取码:a7cl
注意!
无人机发货前已经组装调试好,不需要再下载固件,此固件可留着备用。 -
1.3 PC端安装Ubuntu系统:
PC端安装Ubuntu系统的目的是搭建Ardupilot开发环境,从而使用SITL仿真。可参考以下教程安装虚拟机。
https://mp.weixin.qq.com/s/Z46JL7gTzF73DnIJeKLDsA
如果想自己熟悉搭建Ardupilot开发环境的流程,可以安装纯净版Ubuntu系统,以下是ubuntu18.04镜像下载链接:
https://pan.baidu.com/s/1vmkmHmBmPOP9F1inSW-nmg
提取码:cnlw
-
以下是搭建Ardupilot开发环境的教程,提供给大家作为参考:
https://mp.weixin.qq.com/s/btOL9U14Z_sW7k8frf_E9A
注意!
国内由于网络原因,搭建Ardupilot开发环境会遇到各种各样的不同问题,使用时建议先更换ubuntu源和PIP源。遇到问题更多的需要到官网,论坛或则利用搜索引擎来解决问题。
2. Z410机型介绍
-
Z410无人机是一款专为无人机二次开发入门设计的一款实验机型。
基础版采用pixhawk2.4.8飞控和M8NGPS模块;
单目版在基础板机型上安装了树莓派4B机载电脑,树莓派可通过Dronekit-python、ROS、Opencv编程实现对无人机的外部控制;
视觉版在单目版基础上安装了intel T265双目相机,可实现在无GPS环境下的定位导航。
树莓派系统基于ubuntu20.04打造,集成了多种功能模块:ROS、mavros、Dronekit-python、Opencv、Rpanion-server等。大家不用再花费时间安装编译这些功能包,参考例程可直接上手学习。
-
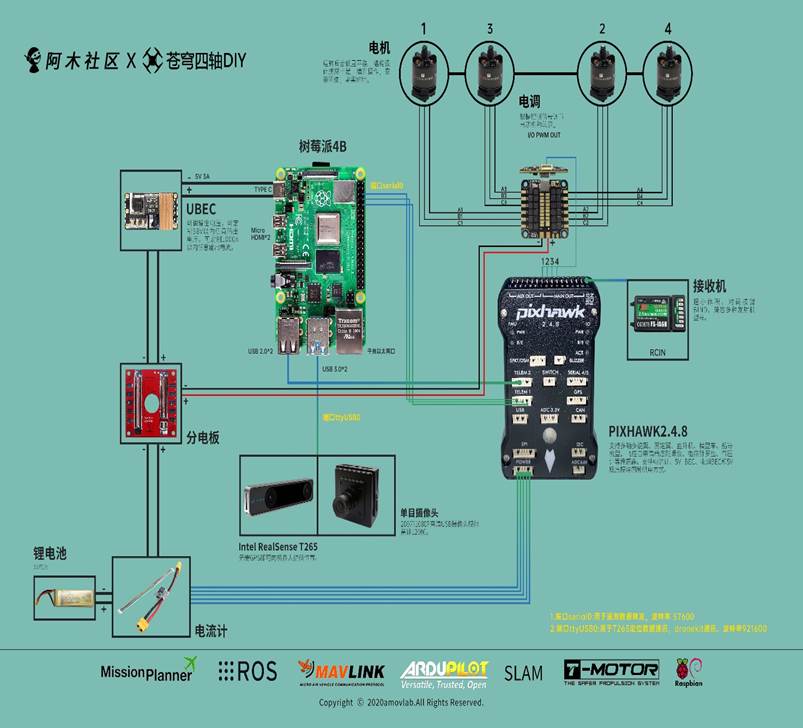
2.1 硬件接线图
-
2.2 硬件设备及用途简介
飞控:pixhawk2.4.8-- 无人机正常飞行的必要硬件,控制无人机姿态;
树莓派:raspberry pi 4B-- 运行外部控制程序及其他系统集成,给飞控发送外部控制命令,或则网络信号;(单目版和视觉版配置)
电调:定制--接收飞控的输出信号,处理后驱动电机旋转;
电机:T-motor2216--电机旋转带动桨叶,从而给无人机提供上升的动力;
电池:3S 5200mah--无人机的动力来源;
电流计:给飞控提供稳压电源;检测实时电压,当电池电压过低采取预设值的动作,自主降落或返航;
UBEC:给树莓派提供稳定的电源;(单目版和视觉版配置)
T265双目相机:用于视觉定位;(单目版和视觉版配置)
单目摄像头:用于实时视频回传;(单目版和视觉版配置)
接收机:与遥控器配套,接收遥控器的控制信号,从而控制无人机飞行;
3. 如何快速进行第一次解锁
-
1.将无人机平放在地面上;
-
2.电池插上BB响报警器,贴上魔术贴,绑扎在飞机底板上;
-
3.打开遥控器,将油门摇杆拉倒最低,SWA~SWD开关均拨到1挡,解除遥控器报警;
-
4.将无人机接上电池,等待飞控自检。自检时间大概30秒左右。此时飞控会闪黄灯,电机会发出“滴~滴~”声;
-
5.长按安全开关,直到安全开关LED指示灯常亮。此时飞控LED会蓝灯闪烁,电机“滴~滴~”声停止;
-
6.遥控器左边油门摇杆往右下角一直按住大概2秒左右,蜂蜜器会长鸣一声,表示飞控已解锁。此时飞控蓝灯长亮,电机会怠速旋转;
-
7.推动油门超过50%,电机会加速;
-
8.油门摇杆往左下角一直按住大概2秒左右,飞控会上锁。此时飞控蓝色指示灯闪烁;
基本的解锁上锁操作完成。
演示视频:
4. 如何进行第一次试飞
-
新手请先参考Z410基础版室外飞行基本操作视频,了解遥控器的基本使用后再进行飞行,盲目的飞行会导致飞行器损坏甚至人身伤害,请务必注意安全。
注意!
新手初次请勿在室内进行飞行。 -
4.1 Z410飞行前的准备:
-
4.2 遥控器介绍及自稳模式飞行:
-
4.3 定高,悬停,返航模式飞行:
-
4.4 降落,绕圈,有头无头及结束飞行操作:
5. 使用这台无人机需要具备的一些基础知识:
-
5.1 锂电池的正确使用方法和充电操作:
注意!
锂电池是易燃易爆品,短路、剧烈碰撞、针刺,高温等情况都有可能导致锂电池燃烧,使用时请务必注意安全,请置于阴凉干燥处存放。 -
5.2 BB响低电压报警器的使用
演示视频:
-
5.3 数传模块的使用(基础版机型配数传)
演示视频:
-
5.4 Pixhawk飞控的基本调试、地面站的使用参考教程:
第一课:https://mp.weixin.qq.com/s/OC10elPEhG5Ut0i44SAemw
第二课:https://mp.weixin.qq.com/s/ldYP71GftgAF9tEnrcgi4w
第三课:https://mp.weixin.qq.com/s/OvN6VtMtSChqy3H2gMlC3w
注意!
无人机发货前已经进行了调试和试飞。所以没有必要按照教程再做一遍。教程提供给大家学习。 -
5.5 飞行模式的含义和正确使用:
-
5.6 Pixhawk飞控不能解锁常见问题汇总(1)
-
5.7 Ubuntu系统的基本操作:
6. 以后扩展开发方向
-
1.可测试扩展思岚A1,A2激光雷达避障(简单避障,不建图);
-
2.可测试扩展4G/5G通讯,远距离图数传,从而实现4G/5G控制;
-
3.可测试使用AprilTags进行的室内非GPS飞行(基于ROS);
-
4.可测试使用ROS,Realsense T265相机和AprilTag进行精确着陆;
-
5.可测试使用Apriltags进行室内导航;
-
6.可测试在RVIZ里面查看T265轨迹;
-
7.可测试将整套系统可移植到无人车或则无人船上
-
8.未完待续。。。。。。
以上教程是Z410的一些基本操作。大家可以利用ubuntu系统与ROS系统的开源特性,在此基础上进行扩展,比如避障,跟踪,导航等方面。大家也可以加入到Z410技术讨论微信群,分享自己在开发方面的心得、方法、示例和对遇到的问题进行讨论。