3. Z410-4B-T265视觉版教程
-
为什么要使用双目相机?
我们在室外飞行的时候,无人机定位是依靠GPS全球定位系统。GPS导航现已十分普及,但GPS的精度目前限制在大约10米。另外,更新速率比较慢,大约是10Hz,并且只能支持户外,因为它们需要接收来自GPS卫星的电子三角测量信号,同时山脉和建筑物的反射会造成多径干扰。所以在高大建筑周边,建筑物室内和隧道等地方就没有GPS信号,我们就需要使用其他方法进行定位导航。
视觉版机型在单目版基础上增加了intel T265双目相机,可以通过v-slam(视觉惯性测距即时定位与地图构建)技术,让无人机进行室内定位导航。英特尔实感追踪摄像头T265是一个完整的嵌入式SLAM解决方案。它根据VIO(视觉惯性里程计)并利用最新的算法来输出6自由度追踪**。**通过对6自由度姿态数据(位置和方向)的处理,发送给无人机定位。
双目定位后,如果室内空间足够,就可以进行悬停飞行,一键返航,航点飞行等。从而为以后室内测试更复杂的避障,导航规划等项目奠定基础。
-
3.1 一些常用的T265命令
在安装有ubuntu系统的PC端,输入以下命令来实时查看T265视频:
演示视频:
realsense-viewer: RealSense Viewer 是旗舰工具,通过简单的跨平台 UI 提供对大多数相机功能的访问。 注意:由于树莓派WIFI带宽有限,通过ssh访问树莓派开启realsense-viewer是有卡顿的。如果要观察T265视频画面,建议使用rs-capture命令。

https://github.com/IntelRealSense/librealsense/tree/master/tools/realsense-viewer
rs-capture:将深度和 RGB 数据流式传输和渲染到屏幕
https://dev.intelrealsense.com/docs/rs-capture
rs-pose: 应用程序将打开一个窗口,在该窗口中打印设备位置相对于初始位置的当前 x、y、z 值。
https://dev.intelrealsense.com/docs/rs-pose
rs-pose-predict: 应用程序应打开一个窗口,在该窗口中打印设备位置相对于其初始位置的预测 x、y、z 值。
https://dev.intelrealsense.com/docs/rs-pose-predict
rs-enumerate-devices:T265在出厂前就对相机进行了标定,每个相机内部都带有相机的内参和外参。在终端中输入此命令,即可读取到T265的配置信息
rs-enumerate-devices -c:如果需要读取到相机内参和外参,以及IMU的参数则可以使用此命令(添加-c参数)
-
3.2 启用T265定位的飞控参数设置
默认情况下,无人机发货前设置pixhawk飞控使用GPS在室外定位导航。如果要使用T265双目相机进行室内定位,飞控参数需要进行如下设置:
把飞控连接地面站,点击 配置/调试 菜单---全部参数列表:
先检查以下参数:
AHRS_EKF_TYPE = 3 (EKF类型=EKF3)
EK3_ENABLE = 1 (EKF3启用)
EK2_ENABLE = 0 (EKF2停用)
将第一组定位源参数按照以下设置
EK3_SRC1_POSXY = 6 (水平位置使用外部导航)
EK3_SRC1_POSZ = 1 (垂直位置使用气压计定高)
EK3_SRC1_VELXY = 6 (水平速度使用外部导航)
EK3_SRC1_VELZ = 6 (垂直速度使用外部导航)
EK3_SRC1_YAW = 1 (偏航使用外置罗盘)
COMPASS_USE = 1 (使用外置罗盘)
GPS_TYPE = 0 (禁用GPS)
VISO_TYPE = 2 (IntelT265)
禁用所有速度融合
EK3_SRC_OPTIONS = 0
RTL_ALT=0****室内测试请将返航高度设置为0,让飞行器一当前高度返航。默认是1.5米。
(以下是飞控默认数据,要使用GPS定位改回来就可以了。)
以下是第一组定位源设置,默认情况下不变,使用GPS定位
EK3_SRC1_POSXY = 3(主要水平位置使用GPS)
EK3_SRC1_POSZ = 1(主要垂直位置使用气压计)
EK3_SRC1_VELXY = 3(主要水平速度使用GPS)
EK3_SRC1_VELZ = 3(主要垂直速度使用GPS)
EK3_SRC1_YAW = 1(主要偏航/指南针航向)
GPS_TYPE = 1 (GPS类型 自动)
VISO_TYPE = 0
本机搭载Intel T265双目相机,在室内没有GPS信号的情况下,代替GPS导航定位。双目定位后,如果室内空间足够,就可以进行悬停飞行,一键返航,失控返航,航点飞行。从而为以后室内测试更复杂的避障,导航规划等项目奠定基础。
-
3.3 使用T265定位导航的2种方法
-
3.3.1 使用pyrealsense2启动双目相机
使用pyrealsense2定位原理:将从Realsense T265获得的6自由度姿态数据(位置和方向)和置信度数据交由python脚本处理(该脚本位于vision_to_mavros/scripts/t265_to_mavlink.py),处理后的结果通过MAVLink发送到ArduPilot无人机,从而实现定位。
该脚本将执行以下任务:
a.使用pyrealsense2的相关API获取6自由度姿势数据并跟踪置信度数据,pyrealesense2是librealsense的Python包装器;
b.执行必要的矩阵变换,以匹配Realsense T265和NED的框架以及其他处理步骤;
c.将姿态数据打包到MAVLink消息VISION_POSITION_ESTIMATE中,并将置信度数据打包到虚拟消息中,然后将它们以预定频率发送到ArduPilot,以免输入数据淹没飞控;
d.自动设置EKF home点,让设置和飞行都更为简单;

飞行器机载电脑已经安装好librealsense和pyrealsense2,根据以下步骤即可启动T265
1.无人机接上电池,打开missionplanner地面站,使用数传连接地面站和飞控;
2.使用ssh远程连接树莓派,操作和之前一样;
3.打开终端,切换路径到脚本所在目录:
cd ~/vision_to_mavros/catkin_ws/src/vision_to_mavros/scripts4.执行下面脚本:
python3 t265_to_mavlink.py5.地面站软件,快捷键_CTR+F_,点击_Mavlink Inspector_,能看到数据已经上传到飞控了。

同时usb转ttl模块上的rx和tx指示灯会快速闪烁,表示有数据传输;
脚本正常个运行后,并且FCU开始接收VISION_POSITION_ESTIMATE消息,就看到地面站会消息框会显示“ GPS Glitch**”和“ GPS Glitch cleared”****,确认系统已识别了外部本地化数据。**
6.使用Mission Planner: 右键单击地图上的任意点> Set Home Here > Set EKF Origin Here.
稍等片刻直到四轴飞行器图标出现在Mission Planner的地图上;
7.拿起无人机并四处走动,检查地图上是否显示了无人机的位置运动。 地图上显示的无人机的轨迹应该反映真实的运动,而不会产生过多的失真或超调。 以下是在2m x 2m的正方形中行走的示例。

8.如果外部定位导航数据由于任何原因丢失(跟踪丢失,脚本中断等),重新运行脚本也不会成功定位,需要重新启动无人机(重新上电)并执行之前的操作。
9.飞行测试:(请有无人机操作经验的人操作)
a.在自稳或则定高模式下解锁起飞,检查无人机飞行是否平稳;
b.使用遥控器操作无人机四处移动,并观察Mission Planner上的位置是否稳定;
c.以上没有问题,保持无人机在0.8~1米左右高度,油门50%左右**,切换到Loiter模式,但是如果出现任何问题,请随时准备切换回Stabilize (自稳)/ Alt-Hold(定高);**
d.正常情况下,无人机应该稳定悬停在空中;
e.遥控器操作无人机四处缓慢缓慢移动,查看无人机稳定状态。测试时注意始终准备切换回“稳定/保持”状态;
f.如果一切正常,下次就可以在Loiter模式下解锁和起飞。
注意!
请确保双目相机水平向前安装,测试环境光照充足,双目前方特征明显的视觉范围测试。10.数据查看:
a. 视觉测距信息将出现在VISO 数据闪存日志消息中。
b. EKF的视觉测距信息将显示在XKFD消息中。
11.参考视频:
-
3.3.2 ROS系统下启用T265
这是第二种使用双目相机定位的方法。
ROS下 双目相机T265的定位原理:从realsense-ros节点获得的位置数据由vision_to_mavros节点处理,并通过主题/ mavros / vision_pose / pose发送到mavros节点。 mavros将负责ENU-NED帧转换,并通过MAVLink将其发送到ArduPilot无人机,从而实现室内定位。

**本机已经安装好 librealsense、realsense-ros、mavros、vision_to_mavros 等必要的组件,根据以下教程即可启动 T265 定位。
-
1.主从机设置完成
-
2.无人机接上电池,打开 missionplanner地面站,使用数传连接地面站和飞控;
-
3.使用ssh远程连接树莓派;
-
4.开启一个终端,运行 realsense-ros节点
roslaunch realsense2_camera rs_t265.launch/camera/odom/sample/ 和 /tf主题将以200Hz频率发布。
-
5.开启另一个终端,运行 mavros节点
roslaunch mavros apm.launchrostopic echo /mavros/vision_pose/pose未发布。
-
6.开启第三个终端,运行 vision_to_mavros节点
roslaunch vision_to_mavros t265_tf_to_mavros.launchrostopic echo /mavros/vision_pose/pose现在应该显示来自T265的姿态数据。
rostopic hz /mavros/vision_pose/pose应该显示该主题以30Hz的频率发布。
以上3个节点运行成功,并且FCU开始接收VISION_POSITION_ESTIMATE消息,就看到地面站会消息框会显示“ GPS Glitch”和“ GPS Glitch cleared”,确认系统已识别了外部本地化数据。
-
7.设置 EKF HOME 点
a. 使用Mission Planner: 右键单击地图上的任意点> Set Home Here > Set EKF Origin Here.
b. 使用脚本设置EKF HOME点,开启第四个终端,运行:
rosrun vision_ to_mavros set_origin.py -
8.打开地面站软件,快捷键CTR+F,点击Mavlink Inspector,能看到数据已经上传到飞控了。室内定位运行成功,切换到loiter悬停模式,指示灯是蓝色,表示可以解锁;如果切换到loiter变成黄灯,表示室内定位运行失败,请重新检查再启动。
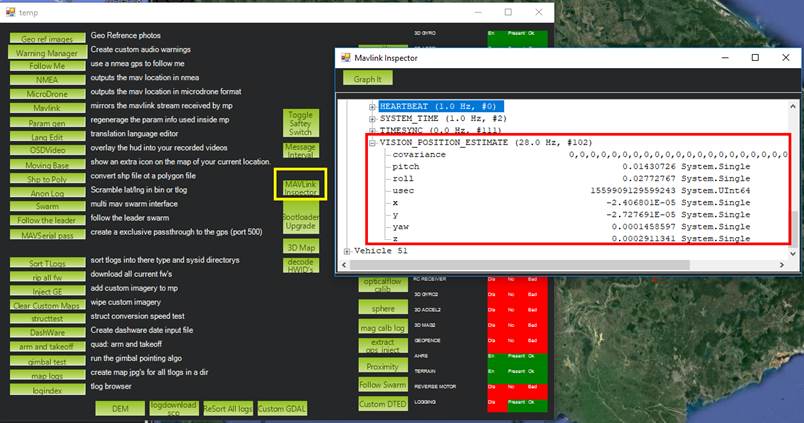
同时usb转ttl模块上的rx和tx指示灯会快速闪烁,表示有数据传输;
-
9.稍等片刻直到四轴飞行器图标出现在 Mission Planner 的地图上;
-
10.拿起无人机并四处走动,检查地图上是否显示了无人机的位置运动。 地图上显示的无人机的轨迹应该反映真实的运动,而不会产生过多的失真或超调。 以下是在2m * 2m的正方形中行走的示例

-
11.飞行测试:(请有无人机操作经验的人操作)
a.在自稳或则定高模式下解锁起飞,检查无人机飞行是否平稳;
b.使用遥控器操作无人机四处移动,并观察Mission Planner和rviz上的位置,以查看跟踪是否稳定;
c.以上没有问题,保持无人机在0.8~1米左右高度,油门50%左右,切换到Loiter,但是如果出现任何问题,请随时准备切换回Stabilize / Alt-Hold。
d.正常情况下,无人机应稳定悬停并能够保持其位置。 使用遥控器缓慢移动无人机2-3米,验证比例(便于在rviz上查看)
e.如果一切正常,下次就可以在Loiter模式下解锁和起飞。
注意:在切换到 Loiter 模式之前,请始终确认位置反馈运行正常。 注意环境中的工作边界,即由于缺少功能,请勿快速移动或旋转运动,可能丢失跟踪定位。
f.如果外部定位导航数据由于任何原因丢失(跟踪丢失,脚本中断等),重新运行脚本也不会成功定位,需要重新启动无人机(重新上电)并执行之前的操作。
-
12.数据查看:
视觉测距信息将出现在VISO 数据闪存日志消息中。
-
演示视频:
-
13.成功运行以上节点,下次可以只需要开启一个终端,使用下面这个命令一次启动所有节点:
roslaunch vision_to_mavros t265_all_nodes.launch此命令一次执行3个launch:
rs_t265.launch
apm.launch
t265_tf_to_mavros.launch
这样可避免开启多个终端,简化操作,方便飞行。
再使用脚本设置EKF HOME点:
rosrun vision_to_mavros set_origin.py