G1吊舱
1、简介:
阿木实验室针对中小型无人机开发的定焦三轴防抖云台吊舱,可通过网络向用户提供最高2.7K@60fps的视频流信号;可与阿木实验室推出的机载计算机(AllSpark系列)有机结合,构成智能吊舱开发者套件,助力用户建立无人机与深度学习的联结。
应用场景:
- 实时航拍
- 地理信息勘测
- 机器人视觉感知
- 实时目标检测与追踪*
- 深度学习模型训练*
- 深度学习模型验证*
- ......
注意: 标注*号的项目需配合机载计算机实现
产品所包含的组件如下:
- G1吊舱 * 1
- 专用安装螺柱 * 4 (M2 * 40mm)
- 装配螺栓 * 8 (M2 * 5mm)
- 三合一连接线(网络、电源、相机控制接口)* 1
- USB转串口模块 * 1
- 串口转接线 * 1
- 云台调试支架 * 1 (上碳板 * 1,下碳板 * 1,螺柱 * 4,螺栓 * 8)
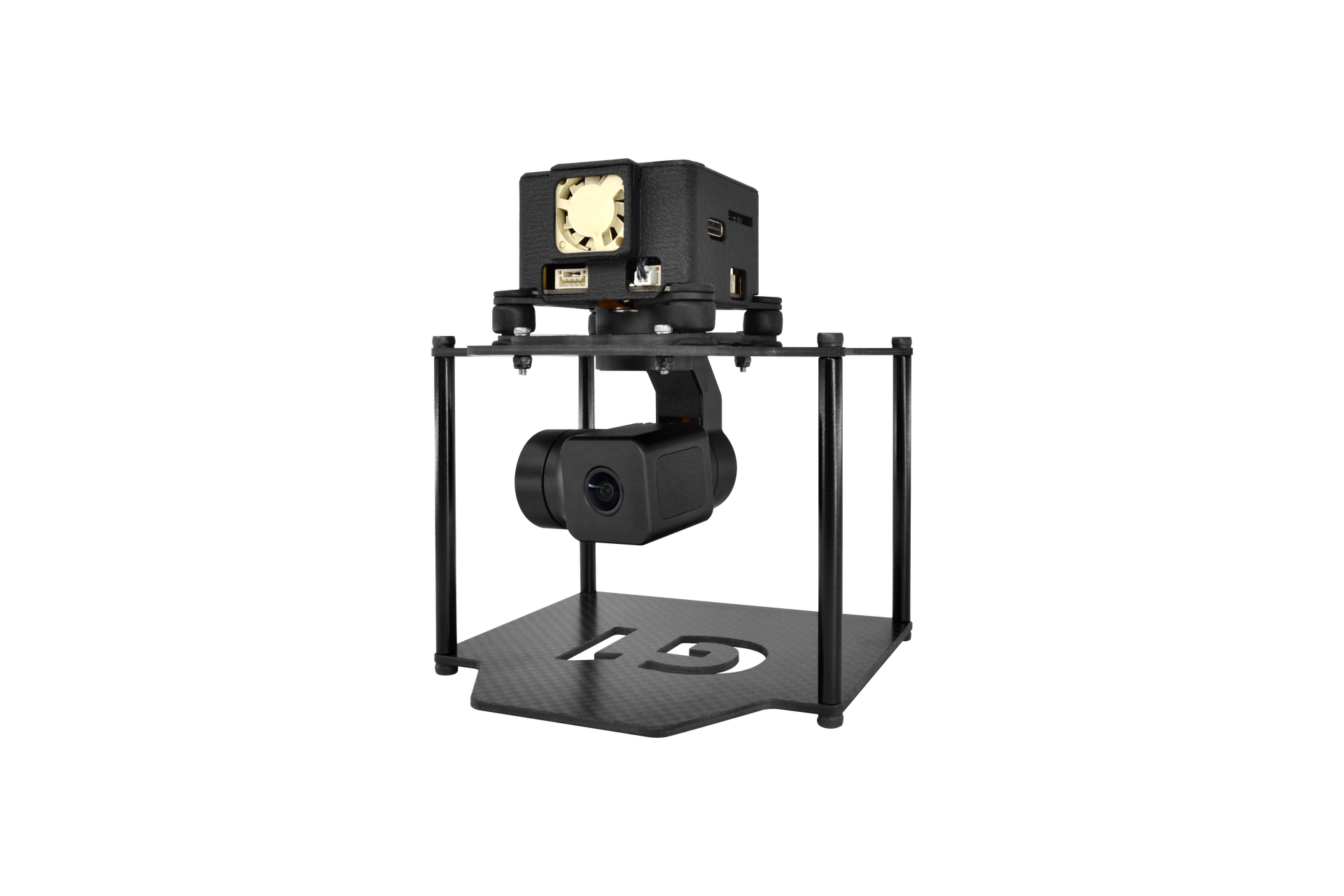
2、外观:
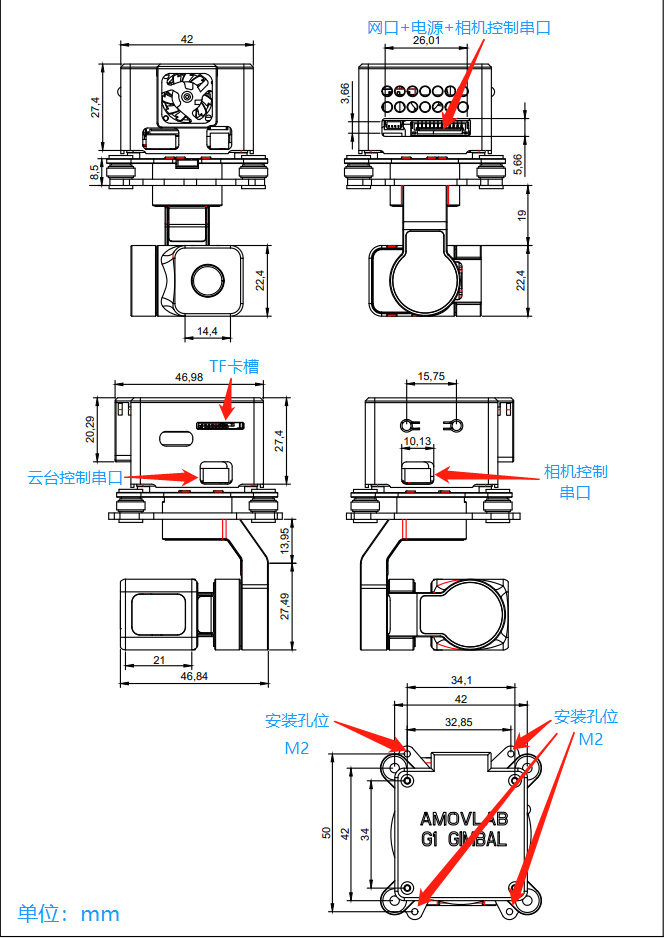
3、机械尺寸与电气接口:
4、基本参数:
| 流媒体类型 | RTSP |
|---|---|
| 编码格式 | H.264 |
| 分辨率 | 4K@24/25/30/fps(差分,仅支持录制) 2.7K@24/25/30/48/50/60fps 1080P@24/25/30/48/50/60/120fps 720P@24f/25/30/48/50/60/120/240fps |
| 支持码率 | 最小带宽500Kb,最大带宽10Mb |
| 镜头类型 | 定焦镜头 |
| 焦距 | 15.43mm |
| 光圈 (F/NO.) | 2.0 |
| 对角 FOV(D) | 143° (y’=3.625mm) |
| 垂直 FOV(V) | 69° (y’=1.763mm) |
| 水平 FOV(H) | 125° (y’=3.167mm) |
| 畸变 TV Distortion | <-33% |
| 相对亮度 Relative Illumination | >66% |
| 镜头工作温度 Operation Temperature | -20~+60℃ |
| 图像传感器类型 | CMOS |
| 型号 | OV OS12D40 |
| 有效像素 | 11.3M |
| 传感器尺寸 | 1/2.49” |
| 像素点尺寸 | 1.4×1.4(μm) |
| 增稳模式 | 机械三轴 |
| 可控角度 | 俯仰:+90°~ -30° 横滚:±45° 偏航:±60° |
| 最大控制转速 | 180° /S |
| 角度抖动量 | ±0.005° |
| 静止功耗 | 4W(12V典型值,启用流媒体+静止水平放置) |
| 整机质量 | 99g |
| 软件支持 | |
| Linux(ARM&X86) | 地面站 C++ SDK/python SDK |
| windos(ARM&X86) | 地面站 C++ SDK/python SDK |
| ROS | ROS SDK |
注意: SDK针对AllSpark系列机载计算机优化与测试,建议搭配使用
2024年度针对镜头进行了调整,参数如下
| 镜头类型 | 定焦镜头 |
|---|---|
| 焦距 | 10.5mm |
| 光圈 (F/NO.) | 3.6 |
| 对角 FOV(D) | 41° (y’=3.928mm) |
| 垂直 FOV(V) | 25° (y’=2.356mm) |
| 水平 FOV(H) | 33° (y’=3.143mm) |
| 畸变 TV Distortion | <-1% |
| 相对亮度 Relative Illumination | >80% |
| 镜头工作温度 Operation Temperature | -20~+60℃ |
| 图像传感器类型 | CMOS |
| 型号 | IMX577 |
| 有效像素 | 12.33M |
| 传感器尺寸 | 1/2.3” |
| 像素点尺寸 | 1.55×1.55(μm) |
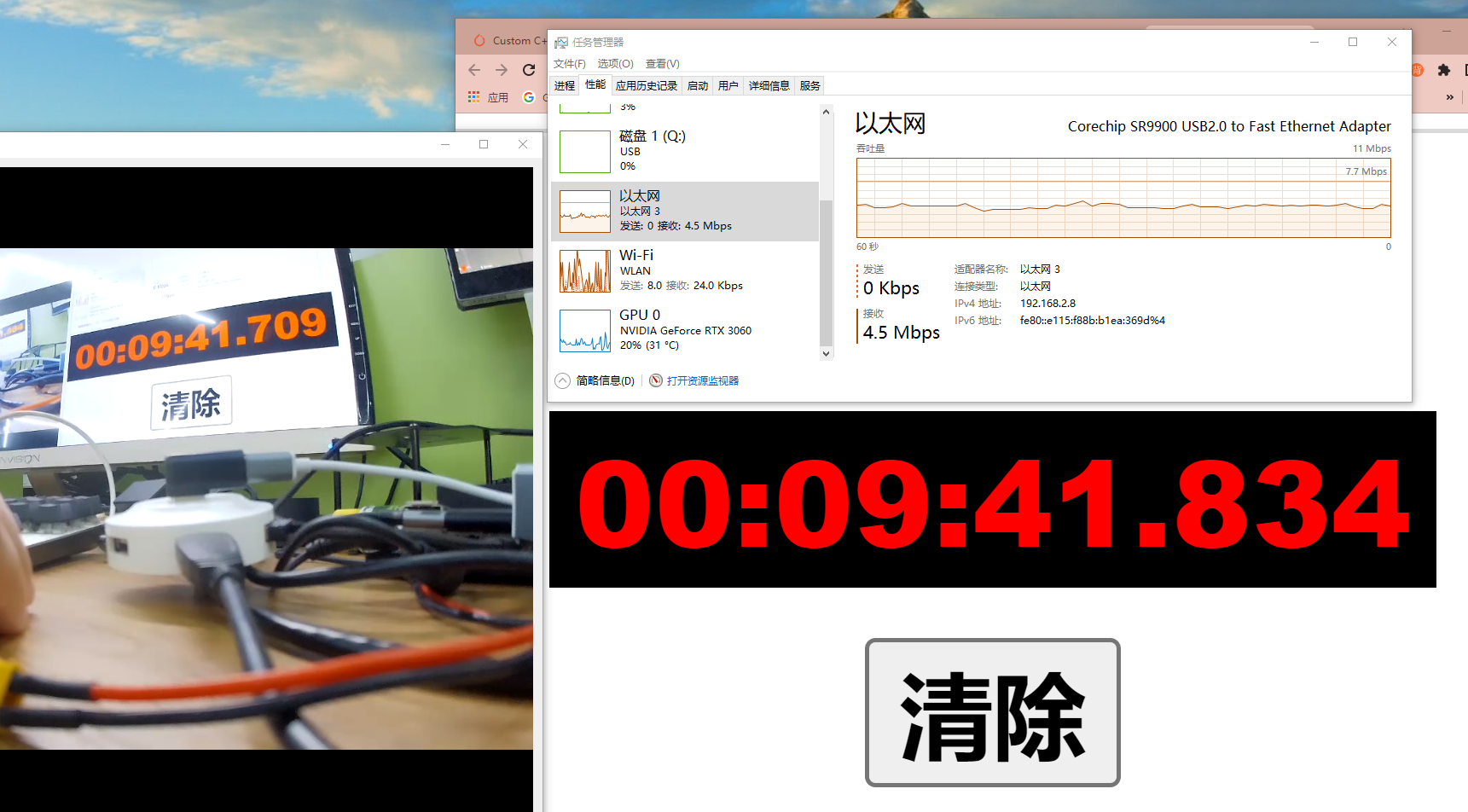
5、视频流延迟测试:

-
测试条件:使用硬件解码,使用吊舱拍摄显示器上的计时器,吊舱的画面显示在同一显示器上,上面截图左侧是吊舱拍摄到的画面右侧是计时器的画面,获取时间差从而计算得到视频流延迟
-
延迟范围:在获取720P视频分辨率、码率在4.7Mbps,视频延迟(摄像头到显示器)在150~200ms