Prometheus仿真开发套件使用手册
产品简介
- 基础款
- 适用于室内学习和使用Prometheus相关产品和二次开发

- 笔记本
- 适用于室内外学习和使用Prometheus相关产品和二次开发

产品介绍
Prometheus仿真开发套件预装PX4、仿真启动器和Prometheus相关的⽆⼈机仿真开发环境,⽀持到⼿即开发,能够帮助开发者快速学习和使⽤Prometheus项⽬。仿真开发套件搭载Prometheus地⾯站和Prometheus使用说明,能够提升Prometheus开发体验和开发效率。所有购买客户均附赠VIP答疑服务,全⽅⾯积累PX4 SITL、Mavros、Gazebo、Prometheus及相关算法仿真知识和经验。 Prometheus仿真开发套件是AMOVLAB为Prometheus仿真以及matlab仿真专门打造的一款小型X86计算主机,出厂既预装了仿真所需全部环境及资源,实现用户上手一键仿真以及更方便快捷进行二次开发。 Prometheus仿真开发套件软件分为两个版本,一个版本为Prometheus仿真主机,一个版本为prometheus+matlab仿真主机,两者硬件相同,所配置资源与环境不同。
软件环境
Prometheus仿真开发套件预装Ubuntu 20.04操作系统及ROS noetic环境,同时包含PX4及Prometheus开发环境,可免去复杂的配置过程。
| 预装软件 | 功能 |
|---|---|
| PX4源代码 | PX4源码编译及烧录、PX4软件在环仿真 |
| Gazebo素材包 | Gazebo官⽅提供的素材库 |
| 遥控器驱动包 | ⽀持遥控器输⼊控制 |
| Mavros功能包 | ⽀持PX4与ROS通信 |
| Prometheus源代码 | Prometheus仿真开发,包括控制、路径规划及⽬标识别 |
| Prometheus仿真启动器 | ⽀持⼀键启动仿真功能、⼀键关闭仿真功能 |
| PrometheusPro地⾯站 | ⽀持⽆⼈机数据实时监控、简单指令操作 |
| Matlab-Gazebo联合仿真(额外付费) | Matlab-Gazebo联合仿真(额外付费) |
注1:Matlab-Gazebo联合仿真为额外付费功能,详情⻅Matlab-Gazebo联合仿真课程。 注2:Prometheus部分仿真功能(如点击跟踪,H标志降落等)需Nvidia显卡,默认版仿真主机不⽀持,请联系客服升级仿真电脑
规格参数
| 名称 | 基础款 | 笔记本 | 定制款 |
|---|---|---|---|
| 图片 | |  |  |
| 型号 | SWNUC12WSKi5000 | ThinkBook16 | 台式机,笔记本等 |
| 重量 | 523g | 1.817KG | 联系客服均可定制 |
| 尺寸 | 117mm112mm37mm | 16英寸 | 联系客服均可定制 |
| 处理器 | Intel酷睿12代i5-1240P | Intel酷睿12代i5 12500H | 联系客服均可定制 |
| 主频 | 12核16线程4.4GHz | 12核16线程2.5GHz | 联系客服均可定制 |
| 显卡 | Intel 锐炬Xe显卡 | NVIDIA RTX 2050 4GB | 联系客服均可定制 |
| 内存 | 三星16GB | 16G DDR5 \7500MHz | 联系客服均可定制 |
| 固态存储 | 三星9A1 256GB | 1T固态硬盘 (双M.2 22*80 SSD) | 联系客服均可定制 |
| 网络 | 英特尔"i225-VRJ45以太网接口(10/100/1000/2500Mbps),英特尔*Wi-Fi6EAX211无线网卡 | 1 * RJ45 Wi-Fi 6 | 联系客服均可定制 |
| 输出 | HDMI2.0+DP 4屏4K显示 | 2.5K@120Hz | 联系客服均可定制 |
| 功率 | 120W/20V | 100W/20V/5A | 联系客服均可定制 |
| 散热 | 全铜散热片,智能温控风扇 | 智能温控风扇 | 联系客服均可定制 |
| 接口 | 2x前置USB 3.2 Type-A ,1x后置USB 3.2 Type-A ,1x后置USB 2.0 Type-A,2x内部USB2.0(通过接头),2x后置雷电4接口 ,2x后置HDMI2.0b视频接口 | 1 * HDMI2.1 ,2 * USB3.2Gen1 ,1 * RJ45,USB3.2Gen2,1 * USB2.0 | 联系客服均可定制 |
注1:配套遥控器型号为富斯 i6s
注2:本产品不提供键盘、鼠标及显⽰器等外设,请额外购买使用
注3:对于有定制需求客户可以联系客服,我们支持定制:笔记本,台式机,DIY主机,ITX主机,NUC等均可,满足您对硬件的更高需求
使用说明
仿真套件开箱视频
1、硬件连接方式 将收货硬件全部拿出,电源组装,接上电脑电源接口。准备外接显示屏连接仿真电脑HDMI(HD)接口。拿出遥控器连接线,插入USB接口连接遥控器
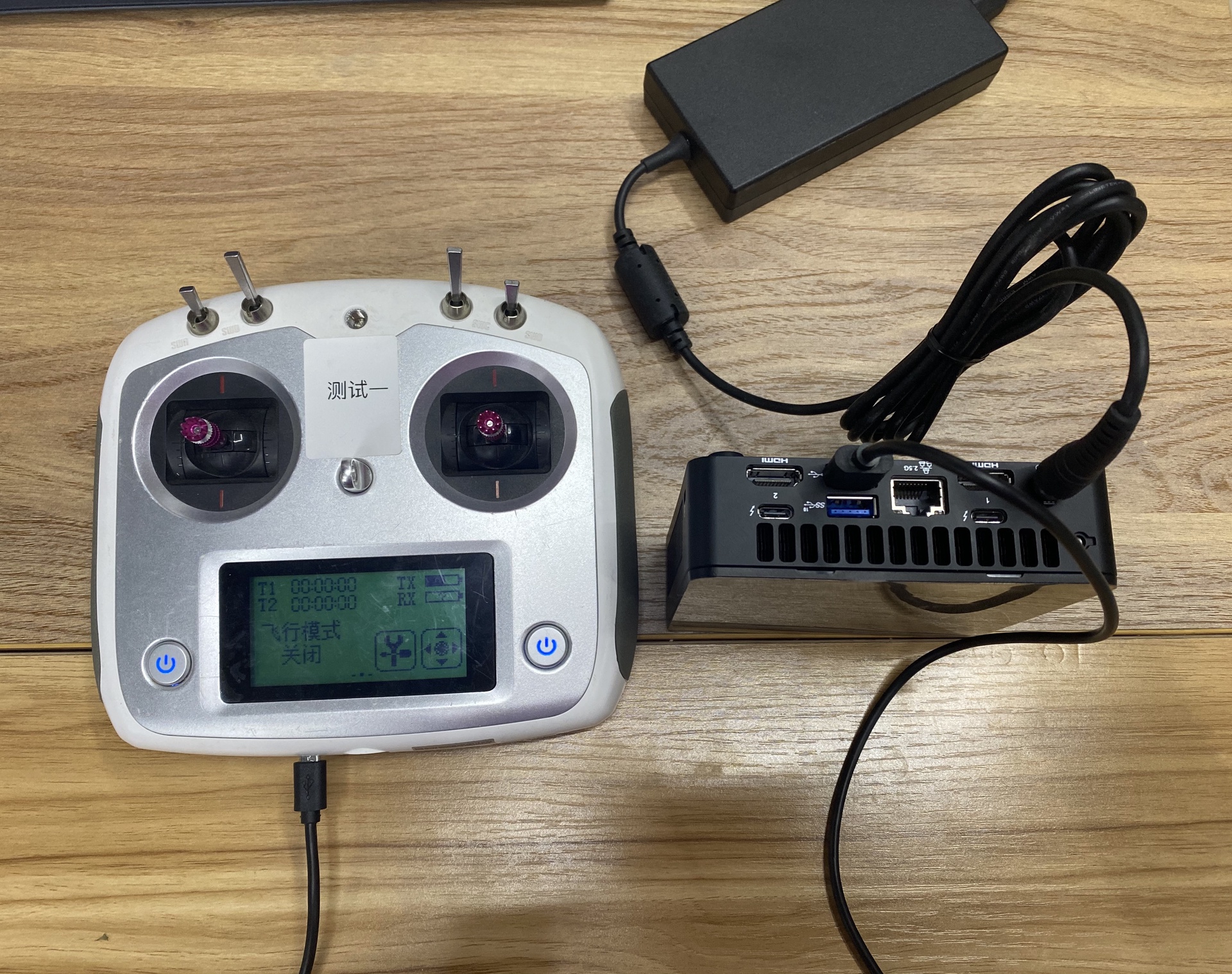
点击仿真主机电源按键,开启仿真主机,显示灯亮起代表正在开机,USB接口连接外接键鼠


2、输入密码
仿真主机出厂默认 用户名:amov 密码: amov 输入密码amov,进入主机
3.遥控器介绍及使用方法 参见Prometheus wiki中 3.4.仿真中遥控器使用说明 链接如下:遥控器使用说明
注:仿真套件中基础款主机做了改款改为intel nuc华尔街峡谷,使用方法与之前相同,硬件改为intel nuc品质更有保证,软件系统升级到Ubuntu20.04,相应Prometheus也升级到最新
软件仿真使用

仿真操作视频
强烈建议请看完操作视频,可以减少很多弯路,也可以学习到很多
仿真启动器操作视频
Prometheus仿真功能展示
1.起飞降落
打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-起飞降落按钮
遥控器SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,到达预设高度后悬停30秒,随后自动降落,效果如下
操作链接
运行结果展示
2.惯性系控制打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-惯性系控制按钮
遥控器SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,飞行到预设位置(ENU坐标系下(1,0,1)坐标点)后将悬停30秒,随后降落效果如下
操作链接
运行结果展示
3.机体系控制
打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-机体系控制按钮遥控器
SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,飞行到预设位置(body坐标系下(1,0,0)坐标点)后将悬停30秒,随后降落效果如下
操作链接
运行结果展示
4.经纬高控制打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-经纬高控制按钮遥控器
SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,飞行到预设位置(无人机当前经纬度,高度5米的位置点)后将悬停30秒,随后降落效果如下
操作链接

运行结果展示
5.轨迹控制打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-轨迹控制按钮遥控器
SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,然后飞行一个圆形轨迹后将悬停30秒,随后降落效果如下
操作链接
运行结果展示
6.集群控制打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-集群控制按钮遥控器
SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
此时可通过在终端界面输入相关指令控制无人机集群,如下图所示
其中输入0后将输入位置控制数据,控制无人机集群移动
输入1后切换无人机集群队形为一字队形(无人机默认以一字队形飞行)
输入2后切换无人机集群队形为三角队形效果如下
操作链接
运行结果展示
7.二维码自主降落打开遥控器并连接仿真套件,打开仿真启动器,点击目标检测模块教学例程-二维码自主降落按钮
点击图像话题右边的刷新按钮,切换rqt_image_view的图像话题到/uav1/prometheus/camera/rgb/image_landpad_det,查看二维码检测的可视化(无人机在没有起飞时,摄像头朝下画面可能为白色)
遥控器解锁无人机,并切换到RC_POS_CONTROL模式,等待无人机起飞并保持悬停(或手动飞行到一定高度)
遥控器切换到COMMAND_CONTROL,无人机飞行到一定高度识别二维码,执行降落程序,等待无人机完成降落效果如下
操作链接
运行结果展示
8.二维码探寻降落打开遥控器并连接仿真套件,打开仿真启动器,点击目标检测模块教学例程-二维码探寻降落按钮
点击图像话题右边的刷新按钮,切换rqt_image_view的图像话题到/uav1/detection/image,查看二维码检测的可视化(无人机在没有起飞时,摄像头朝下画面可能为白色) image.png
输入二维码id,目前world中有id为1~20二维码,比如输入13
遥控器解锁无人机,并切换到RC_POS_CONTROL模式,等待无人机起飞并保持悬停(或手动飞行到一定高度)
遥控器切换到COMMAND_CONTROL,无人机绕圆飞行,并且在绕圆到过程中进行二维码识别,如果识别到与步骤2输入的Id相同的二维码,则终止圆飞行,前往对应二维码进行自主降落效果如下
操作链接
运行结果展示
9.SiamRPN框选跟踪(这个功能基础款无法实现,只有升级款以及带Nvidia独显定制款可以运行)
打开遥控器并连接仿真套件,打开仿真启动器,点击目标检测模块教学例程-SiamRPN框选跟踪按钮
框选目标
遥控器解锁无人机,并切换到RC_POS_CONTROL模式,等待无人机起飞并保持悬停(或手动飞行到一定高度)
遥控器切换到COMMAND_CONTROL。无人机接受程序控制指令,靠近目标,并在距离目标一定距离后保持悬停
程序运行效果如下
操作链接
运行结果展示
10.YOLOv5+SiamRPN点击跟踪(这个功能基础款无法实现,只有升级款以及带Nvidia独显定制款可以运行)
打开遥控器并连接仿真套件,打开仿真启动器,点击目标检测模块教学例程-YOLOv5+SiamRPN点击跟踪按钮
点击目标
遥控器解锁无人机,并切换到RC_POS_CONTROL模式,等待无人机起飞并保持悬停(或手动飞行到一定高度)
遥控器切换到COMMAND_CONTROL。无人机接受程序控制指令,靠近目标,并在距离目标一定距离后保持悬停效果如下
操作链接
运行结果展示
Matlab-Gazebo联合仿真展示
如果您购买的是matlab仿真主机 请参考对应教学使用视频:Matlab-Gazebo联合仿真课程
仿真套件预装了QGC地面站,方便用户直接连接飞控调试;预装了VSCode,方便用户学习源代码;也预装了向日葵远程,对于需要远程协助的用户带来便利
相关资源
3.阿木实验室官网
仿真Demo
起飞降落
惯性系控制
机体系控制
经纬高控制
轨迹控制
集群控制
二维码自主降落
二维码探寻降落
二维码点击跟踪
圆框穿越
小车点击跟踪
H标志降落
框选跟踪
软件仿真使用
仿真操作视频
强烈建议请看完操作视频,可以减少很多弯路,也可以学习到很多
仿真启动器操作视频
Prometheus仿真功能展示
1.起飞降落
打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-起飞降落按钮
遥控器SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,到达预设高度后悬停30秒,随后自动降落,效果如下
操作链接
运行结果展示
2.惯性系控制打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-惯性系控制按钮
遥控器SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,飞行到预设位置(ENU坐标系下(1,0,1)坐标点)后将悬停30秒,随后降落效果如下
操作链接
运行结果展示
3.机体系控制
打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-机体系控制按钮遥控器
SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,飞行到预设位置(body坐标系下(1,0,0)坐标点)后将悬停30秒,随后降落效果如下
操作链接
运行结果展示
4.经纬高控制打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-经纬高控制按钮遥控器
SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,飞行到预设位置(无人机当前经纬度,高度5米的位置点)后将悬停30秒,随后降落效果如下
操作链接
运行结果展示
5.轨迹控制打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-轨迹控制按钮遥控器
SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
无人机将自动起飞,然后飞行一个圆形轨迹后将悬停30秒,随后降落效果如下
操作链接
运行结果展示
6.集群控制打开遥控器并连接仿真套件,打开仿真启动器,点击无人机控制模块教学例程-集群控制按钮遥控器
SWA档杆向下拨解锁无人机
遥控器SWB档杆拨到中间位置将无人机控制状态切换到RC_POS_CONTROL
遥控器SWB档杆拨到最底部将无人机控制状态切换到COMMAND_CONTROL
此时可通过在终端界面输入相关指令控制无人机集群,如下图所示
其中输入0后将输入位置控制数据,控制无人机集群移动
输入1后切换无人机集群队形为一字队形(无人机默认以一字队形飞行)
输入2后切换无人机集群队形为三角队形效果如下
操作链接
运行结果展示
7.二维码自主降落打开遥控器并连接仿真套件,打开仿真启动器,点击目标检测模块教学例程-二维码自主降落按钮
点击图像话题右边的刷新按钮,切换rqt_image_view的图像话题到/uav1/prometheus/camera/rgb/image_landpad_det,查看二维码检测的可视化(无人机在没有起飞时,摄像头朝下画面可能为白色)
遥控器解锁无人机,并切换到RC_POS_CONTROL模式,等待无人机起飞并保持悬停(或手动飞行到一定高度)
遥控器切换到COMMAND_CONTROL,无人机飞行到一定高度识别二维码,执行降落程序,等待无人机完成降落效果如下
操作链接
运行结果展示
8.二维码探寻降落打开遥控器并连接仿真套件,打开仿真启动器,点击目标检测模块教学例程-二维码探寻降落按钮
点击图像话题右边的刷新按钮,切换rqt_image_view的图像话题到/uav1/detection/image,查看二维码检测的可视化(无人机在没有起飞时,摄像头朝下画面可能为白色) image.png
输入二维码id,目前world中有id为1~20二维码,比如输入13
遥控器解锁无人机,并切换到RC_POS_CONTROL模式,等待无人机起飞并保持悬停(或手动飞行到一定高度)
遥控器切换到COMMAND_CONTROL,无人机绕圆飞行,并且在绕圆到过程中进行二维码识别,如果识别到与步骤2输入的Id相同的二维码,则终止圆飞行,前往对应二维码进行自主降落效果如下
操作链接
运行结果展示
9.SiamRPN框选跟踪(这个功能基础款无法实现,只有升级款以及带Nvidia独显定制款可以运行)
打开遥控器并连接仿真套件,打开仿真启动器,点击目标检测模块教学例程-SiamRPN框选跟踪按钮
框选目标
遥控器解锁无人机,并切换到RC_POS_CONTROL模式,等待无人机起飞并保持悬停(或手动飞行到一定高度)
遥控器切换到COMMAND_CONTROL。无人机接受程序控制指令,靠近目标,并在距离目标一定距离后保持悬停
程序运行效果如下
操作链接
运行结果展示
10.YOLOv5+SiamRPN点击跟踪(这个功能基础款无法实现,只有升级款以及带Nvidia独显定制款可以运行)
打开遥控器并连接仿真套件,打开仿真启动器,点击目标检测模块教学例程-YOLOv5+SiamRPN点击跟踪按钮
点击目标
遥控器解锁无人机,并切换到RC_POS_CONTROL模式,等待无人机起飞并保持悬停(或手动飞行到一定高度)
遥控器切换到COMMAND_CONTROL。无人机接受程序控制指令,靠近目标,并在距离目标一定距离后保持悬停效果如下
操作链接
运行结果展示
Matlab-Gazebo联合仿真展示
如果您购买的是matlab仿真主机 请参考对应教学使用视频:Matlab-Gazebo联合仿真课程
仿真套件预装了QGC地面站,方便用户直接连接飞控调试;预装了VSCode,方便用户学习源代码;也预装了向日葵远程,对于需要远程协助的用户带来便利
相关资源
3.阿木实验室官网
快速上手
打开Prometheus仿真启动器
基本操作
- 勾选上设置的启动通信节点
- 启动基础仿真脚本中的一个,室内仿真或者室外仿真。
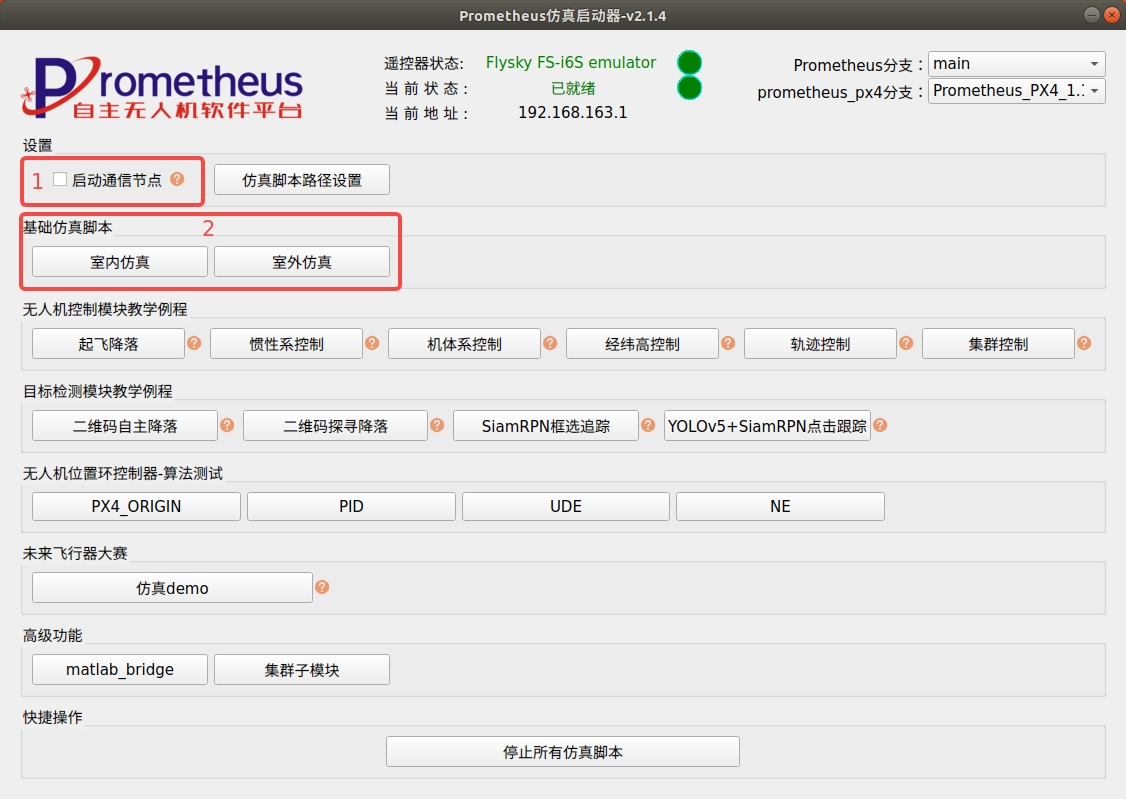
所有终端正常启动完成后,进行下一步操作。
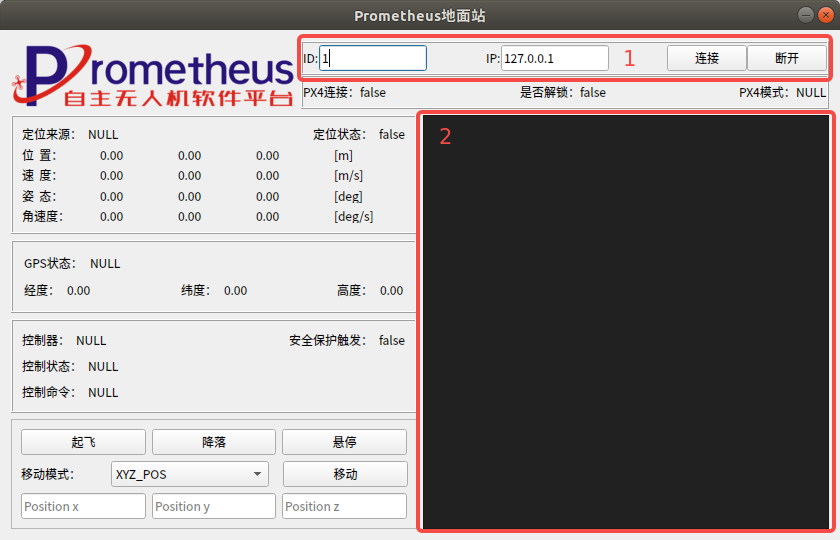
打开PrometheusGround软件
基本操作
- 输入正确的ID和IP(如果没有特殊情况,一切如下图所示),点击连接即可
- 点击后,在下图2中出现连接成功字样,如果没有出现任何打印消息,请参考下方问题排查。
问题排查
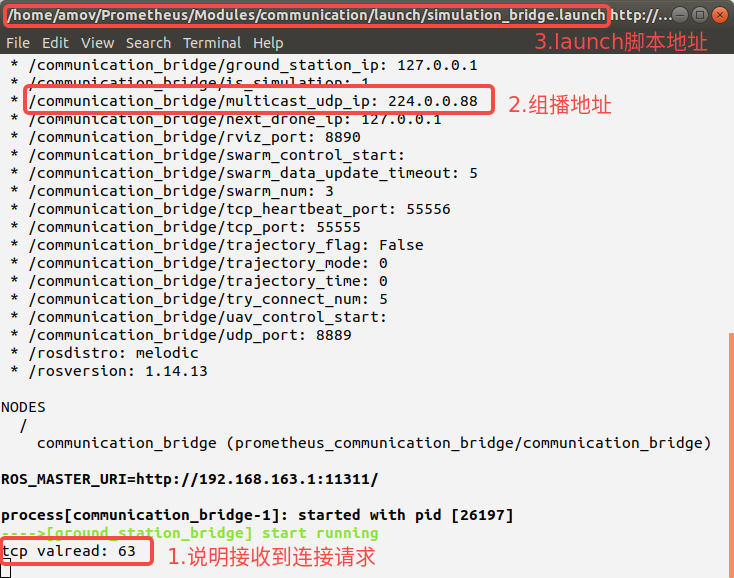
1、没有任何打印消息有可能是什么情况?
- 查看通信节点是否收到连接请求消息,如下图例1所示说明接收到了连接请求;
- 请检查是否连接局域网(网线或者wifi),如果没有接入任何局域网,且组播地址如下图例2所示。进入下图例3launch文件路径,修改组播地址(multicast_udp_ip)参数设置为127.0.0.1。
实际操作
请参考下面这个使用视频:
快速上手
打开Prometheus仿真启动器
基本操作
- 勾选上设置的启动通信节点
- 启动基础仿真脚本中的一个,室内仿真或者室外仿真。
所有终端正常启动完成后,进行下一步操作。
打开PrometheusGround软件
基本操作
- 输入正确的ID和IP(如果没有特殊情况,一切如下图所示),点击连接即可
- 点击后,在下图2中出现连接成功字样,如果没有出现任何打印消息,请参考下方问题排查。
问题排查
1、没有任何打印消息有可能是什么情况?
- 查看通信节点是否收到连接请求消息,如下图例1所示说明接收到了连接请求;
- 请检查是否连接局域网(网线或者wifi),如果没有接入任何局域网,且组播地址如下图例2所示。进入下图例3launch文件路径,修改组播地址(multicast_udp_ip)参数设置为127.0.0.1。
实际操作
请参考下面这个使用视频:
代码框架
包含两个模块相互配合,分别为地面站和通信节点;
其中逻辑就是两个模块的通信交互,地面站和Prometheus收发程序的其余功能多数都是基于此进行的扩展开发。
地面站和通信节点的代码框架以及流程可以参考下图:(注:此地面站为专业版地面站)
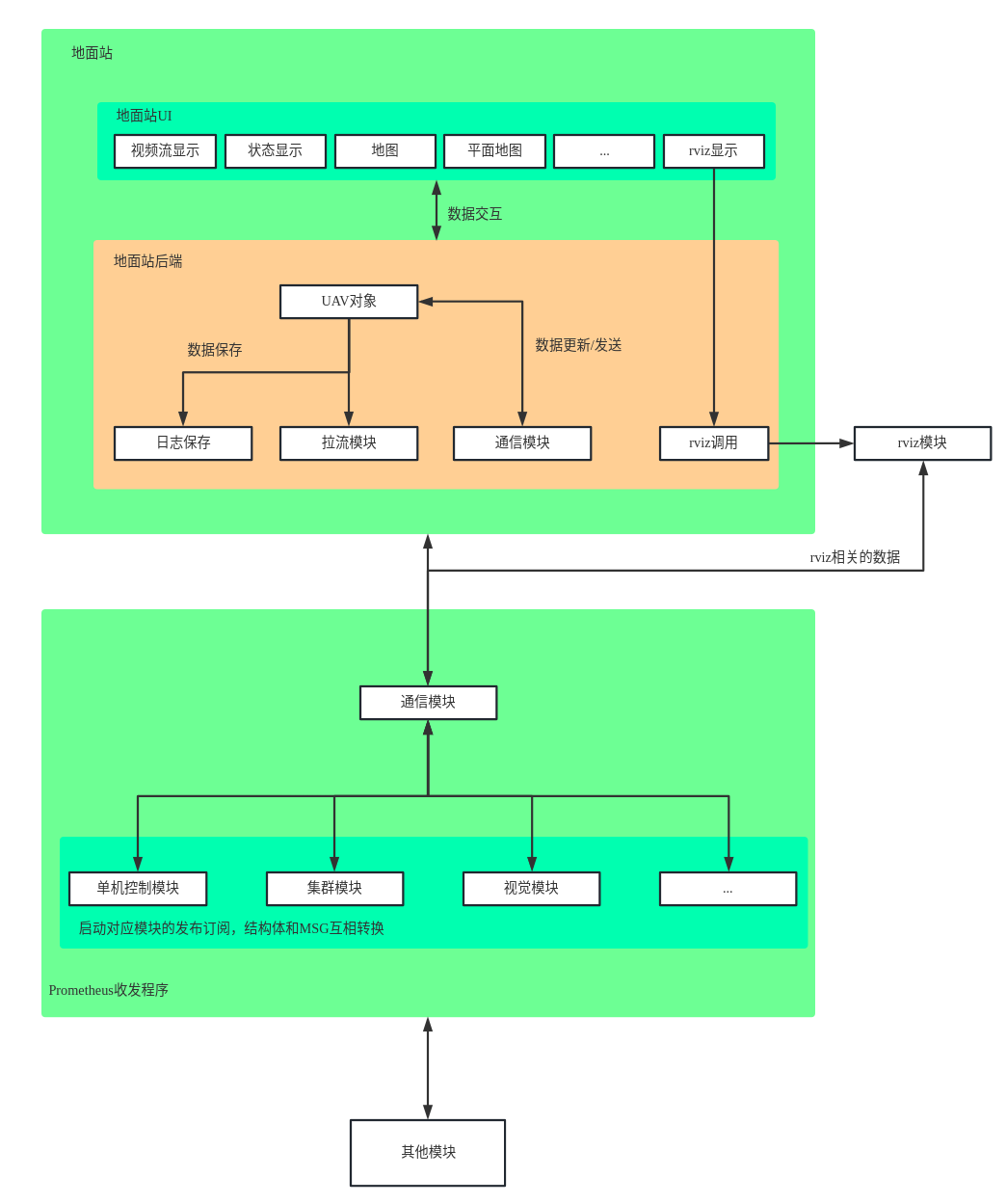
注意:Prometheus收发程序为Prometheus通信节点
接口介绍
主要介绍一下地面站中一些核心接口函数,介绍如下:
/**
* @brief 模版函数,编码函数
*
* @param send_mode 发送方式,TCP或者UDP
* @param msg 进行编码的结构体
* @param id 该数据的发送者ID,输入为0时,则按初始化中的无人机ID为准
* @return int 返回编码后的长度
*/
template <typename T>
int encodeMsg(int8_t send_mode, T msg,int id = 0);
/**
* @brief 解码函数
*
* @param buff 接收到的数据
* @param send_mode 接收到的方式,TCP或者UDP
* @return int 返回解码后得到的结构体对应的ID
*/
int decodeMsg(char *buff,int8_t send_mode);
/**
* @brief 返回结构体ID
*
* @param msg 结构体
* @return uint8_t 结构体对应的ID
*/
template <typename T>
uint8_t getMsgId(T msg);
/**
* @brief UDP发送函数
*
* @param msg_len 发送的数据的长度
* @param target_ip 发送的目标地址
*/
void sendMsgByUdp(int msg_len, std::string target_ip);
/**
* @brief TCP发送函数
*
* @param msg_len 发送的数据的长度
* @param target_ip 发送的目标地址
*/
void sendMsgByTcp(int msg_len, std::string target_ip);
/**
* @brief 创建TCP服务端并返回socket标识符
*
* @param port 端口号
* @return int TCP服务端socket标识符
*/
int waitConnectionFromGroundStation(const int port);
/**
* @brief 创建UDP服务端并返回socket标识符
*
* @param port 端口号
* @return int UDP服务端socket标识符
*/
int waitConnectionFromMulticast(const int port);
发货清单
| 名称 | 型号 | 数量 | 单位 |
|---|---|---|---|
| 仿真主机 | PC | 1 | 套 |
| 遥控器 | 富斯 i6s(阿木改良版) | 1 | 套 |
售后信息
技术支持
购买后客服会赠予
1.Prometheus仿真开发VIP群⼊群资格1个
2.系统重置/升级服务1次
其他说明:
为答谢已经购买旧版本仿真主机的客户,可联系客服加Prometheus仿真开发VIP群
-
本条款仅适用于阿木实验室所生产的产品,阿木实验室通过其授权经销商销售的产品亦适用本条款。
-
我方提供产品的保修期是指交货后产品初步验收合格之日起 12 个月。非用户操作原因产生的故障,由我方负责维修。(耗材不在保修范围内)产品在用户使用过程中,因为软件重新修改产生的问题,我方可根据解决问题的难易程度提供微信语音/视频的指导。
-
产品自购买之日起,一周内经我司核实为质量问题,由阿木实验室承担返修产品的往返快递费,购买阿木实验室产品超过一周到一年内经我司核实为质量问题,用户和我公司各自承担寄出返修产品的快递费。
-
返修时需提供购买凭证和保修卡或交易记录。
-
产品自购买之日起七天内,在正常使用情况下出现质量问题,外观无损坏,凭保修卡或购机凭证在阿木官方销售渠道和经销商处协商可以免费更换同型号产品;经销商在收到更换产品时必须第一时间通知我公司予以备案更换。
-
对于自购买之日起人为损坏、改装、拆机及超过一年免费保修期的,用户必须支付往返邮费及维修成本费用。 收费标准:人工费+配件费用
-
为确保您的权益受到保护,并能及时有效的为您服务,请在购买阿木实验室产品时完整填写好保修卡及索要购机凭证。
-
请访问www.amovlab.com获取完善的售后服务条款。
联系方式

购买⽅式
1.淘宝采购
2.合同采购