SLAM
提示:
在您阅读此内容之前,确保您已经阅读了快速上手指引内容,并了解通信链路 。
Gmapping
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成
-
打开遥控器
-
在PC上打开 No Machine 软件,输入 192.168.1.14 远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP。 -
输入密码 amov 登录到板载计算机
-
打开板载计算机桌面的 sh 文件夹后,右键选择 open terminal
-
输入命令
bash r300_slam_gmapping.sh启动Gmapping建图脚本。 -
将遥控器上的档杆SWB拨至中间位置,开始控制R300移动建图
-
完成建图后,打开一个终端,输入命令
rosrun map_server map_saver -f ~/map保存地图
提示:
-f 参数后面表示地图保存的地址和文件名称,为绝对路径。上面这个指令,将地图保存在 根目录下,并且命名为map。
Cartographer
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成
-
打开遥控器
-
在PC上打开NoMachine软件,输入192.168.1.14远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP。 -
输入密码amov登录到板载计算机
-
打开板载计算机桌面的sh文件夹后,在文件夹内右键选择open terminal
-
输入命令
bash r300_cartographer_slam.sh启动Cartographer建图脚本。
-
将遥控器上的档杆SWB拨至中间位置,开始控制R300移动建图
-
完成建图后,打开桌面的 sh 文件夹,然后在文件夹内右键选择 open terminal。接着,输入命令
bash r300_cartographer_map_save.sh保存地图。
提示:
该脚本将地图默认保存在 /home/amov/amovcar/src/R300/r300_function/maps/ 下。地图的默认名称为 r300_map。使用脚本保存地图会覆盖上一次的地图文件。如果需要多次仿真建图对比,将每次保存的地图单独放在一个文件夹中。
如果您想将地图保存在其他位置,打开脚本,修改文件路径即可。
Cartographer Demo
-
R300的功能包里面提供了一个简单的Cartographer纯激光建图的Demo,其bag文件放在
/home/amov/amovcar/src/R300/r300_function/bag/pure_slam.bag可以通过这个bag,对Cartographer的配置文件进行配置,从而进行建图的调试。打开终端,输入以下命令:roslaunch r300_function r300_cartographer_demo.launch bag_filename:=/home/amov/amovcar/src/R300/r300_function/bag/pure_slam.bag当然,您也可以选择播放自己的bag文件,然后通过修改配置文件,查看不同的建图效果
当bag播放完毕,打开终端,输入以下命令:
roscd r300_function/demo_map bash map_save.sh保存地图
提示:
该脚本将地图默认保存在/home/amov/amovcar/src/R300/r300_function/demo_map/下。地图的默认名称为 demo_map使用脚本保存地图会覆盖上一次的地图文件。如果需要多次仿真建图对比,将每次保存的地图单独放在一个文件夹中。
如果您想将地图保存在其他位置,打开脚本,修改文件路径即可。
下图为该bag的建图结果提示:
如果您R300的桌面上sh文件夹内没有相关脚本文件,请更新最新代码。代码地址见gitee,选择分支为v1.0-beta更新代码以后,与Cartographer相关的脚本文件均在
/amovcar/src/R300/r300_function/sh/目录下,您可以将上述相关脚本放置在桌面的sh文件中,方便您的使用。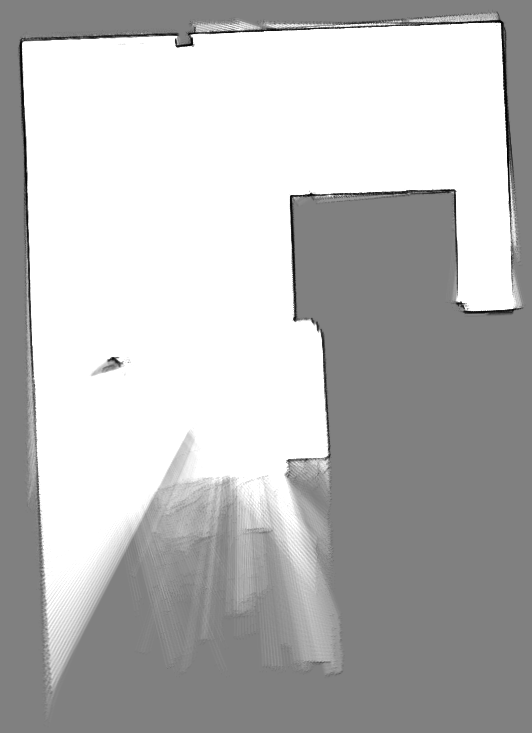
三维建图
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成
-
打开遥控器
-
在PC上打开 No Machine 软件,输入 192.168.1.14 远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP。 -
输入密码 amov 登录到板载计算机
-
打开板载计算机桌面的 sh 文件夹后,右键选择 open terminal
-
输入命令
bash r300_rtabmap.sh启动三维建图脚本。
-
将遥控器上的档杆SWB拨至中间位置,开始控制R300移动建图
-
完成建图后,打开一个终端,输入命令
rosrun map_server map_saver -f ~/map_name保存地图
提示:
如果节点启动异常,请确保相机序列号设置正确。如果相机序列号正常,仍然存在启动失败的情况,请删除amovcar目录下的 devel 和 build 两个文件夹,然后重新编译整个项目。