
R系列无人车概述
什么是R300?
- R300是由 阿木实验室 联合 松灵机器人 打造的一款全栈式底盘+软硬件一体的无人车解决方案,全称为 Autopilot kit R300,简称为R300。R300可以省去无人车制造这一环节,快速进入核心研发的阶段,能够缩短项目或者应用研发的时间,让研发更加高效!
R300能做什么?
-
R300采用松灵 Scout mini 底盘,该底盘性能强悍,载重能力、越野能力优秀。可载重10Kg,高底盘加上摇摆独立悬梁可适应室外大部分运动场景
-
R300行进速度快,空载时可以达到10.8Km/h
-
R300基于开源机器人操作系统 ROS 和 Ardupilot 自动导航系统,无需提前建图可以实现无人车户外自主导航定位
-
R300融合双目相机、深度相机以及激光雷达,可以实现室内SLAM、导航、路径规划等功能
R系列无人车特点
-
R300无人车特点

R300无人车车体属于中大型,越野性能优秀,偏向于室外环境。具备以下优点:
-
前端配备有保险杠,有一定的防碰撞能力,能较好地保护车身及其他硬件,减少小车碰撞时的损坏。
-
车身大部分硬件采用金属材质,结实耐用。
-
车轮采用四轮驱动,动力更加充足,最高速度可达10km/h,并且可以原地旋转。
-
小车拥有悬挂系统,能保证小车更加平稳地运行,保证各种传感器数据更加精确,稳定。
-
24V15AH锂电池动力系统,续航里程可达10KM
-
可载重10KG以下物体
R300硬件组成以及配置参数
硬件配置
| 硬件名称 | 产品详情 |
| R300 基站版 / 移动版 | |
| 板载计算机 |
CPU: Intel i7-8565U,四核八线程 GPU: Intel UHD Graphics 620 ROM: 8GB DDR4 2400MHz 硬盘: 128G SSD |
| 双目相机 | Intel RealSenese T265 |
| 深度相机 | Intel RealSenese D435i |
| 激光雷达 |
型号: LDS-50C-3 测距原理: TOF 测距距离: 0.1m - 40m 激光频率: 16.2kHz 刷新频率: 7 - 15 Hz 扫描角度: 360° 水平角分辨率: 0.23°@ 10Hz / 0.34°@ 15Hz 测距精度: ±30mm 工作电压: 5V |
| RTK定位模块 |
型号: Nano-D Receiver 支持信号: BDS / GPS / GLONASS QZSS定位精度: 10cm(典型值) 初始化时间: 小于10s(典型值) 搜索卫星收敛时间: 冷启动为40s(典型值); 热启动为5s(典型值) 定向: 支持双天线定向(默认为单天线) 服务器端: 支持千寻账号 通信: 集成DTU,支持4G传输(全球全网通) 接口: 串口、外部存储TF卡、USB2.0 OTG、CAN、PPS、EVE NT数据格式: NAME-0183、BINEX、Femtomes ASCII及Binary格式 数据更新频率: 1Hz / 5Hz / 10Hz / 20Hz(默认5Hz) 工作电压: 12V |
| 图数传 |
型号: Homer 通信距离: 150m(无地面端); 800m(有地面端,地面通信无遮挡极限距离); 2.5km(有地面端,地空通信无遮挡极限距离) 工作频率: 5.1GHz ~ 5.9GHz 重量: 146.8g 尺寸: 88 x 66 x 19 mm 额定功率: 6W IP串口: 3路,支持1200 ~ 921600波特率 网口: 2路百兆网口、1路千兆网口 延迟: 50ms 供电电压: 12V锂电池(3S) 无线带宽: 40MHz 无线发射功率: 20mW 天线接口: SMA外螺纹内孔 工作温度: -10°C - 45°C 工作电压: 5V |
| 飞控 |
型号: Pixhawk4 FMU: STM32F765, 32位 Arm® Cortex®-M7, 216MHz, 2MB 内存, 512KB RAM IO处理器: STM32F100,32位 Arm® Cortex®-M3, 24MHz, 8KB SRAM 内置传感器: 加速度计 / 陀螺仪: ICM-20689 加速度计 / 陀螺仪: BMI055 或 ICM20602 磁力计: IST8310 气压计: MS5611 GPS: u-blox Neo-M8N GPS/GLONASS receiver 工作电压: 5V |
-
R300基站版和移动版硬件上配置完全一样,只是移动版不使用基站版RTK,见 通信链路
警告!
虽然基站版和移动版可以通过修改RTK软件配置从而实现互相转换,但是目前尚未进行任何在移动版RTK上同时使用4G信号数据和RTK基站版纠偏数据!,如果您在二次开发的时候,进行上述的尝试,所造成的后果自行承担责任。
性能参数
| 参数类型 | 性能指标 |
| 机械参数 |
尺寸: 627 x 549 x502 mm 轴距: 452 mm 前后轮距: 450 mm 额定负载: 7Kg(默认公路轮胎) 重量: 26Kg 电池: 锂电池24V 15Ah 电机: 直流无刷 4 x 150w 驱动: 四轮独立驱动 悬架: 摇臂独立悬架 转向: 四轮差速转向 安全装备: 伺服刹车、前保险杠 |
| 性能参数 |
空载最大时速: 10.8 Km/h 最小转弯半径: 原地转弯 最大爬坡能力: 30° 最小离地间隙: 107 mm 续航里程: 10Km |
| 控制参数 |
控制模式: 遥控器控制 / 上位机控制 遥控器: 2.4Ghz、极限距离 1 Km 通信接口: CAN |
硬件模块介绍
-
板载计算机

板载计算机上预装了Ubuntu18.04操作系统以及ROS Melodic系统,并搭载有无人车的ROS功能包amovcar、各种传感器的驱动以及常用开发软件等。并通过有线连接的方式接入由Homer图数传组成的局域网中。
-
飞控
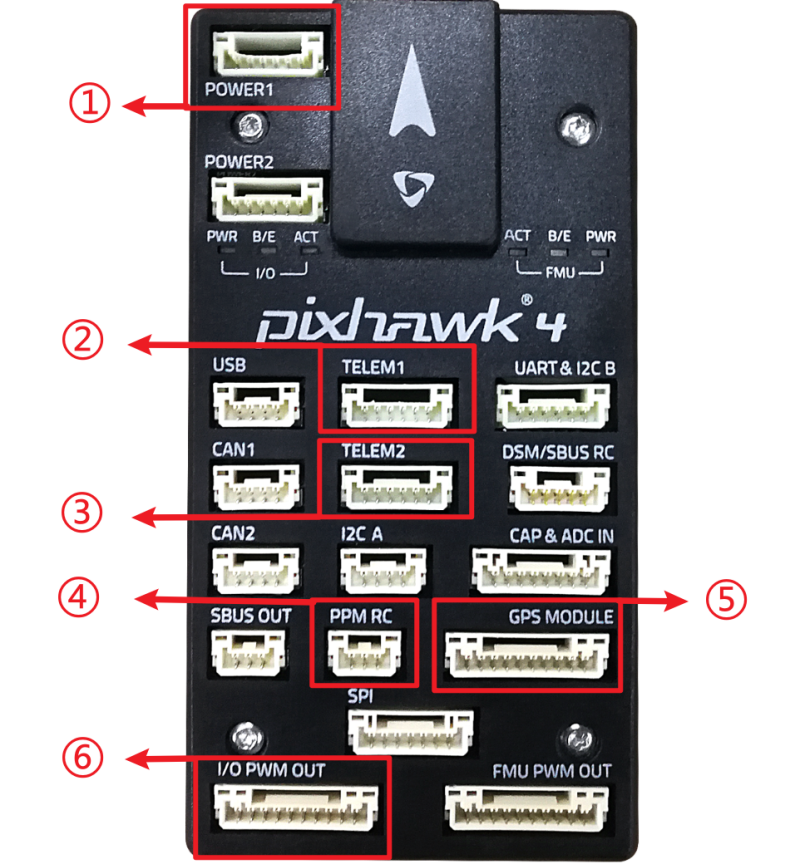
飞控全称飞行控制器,配合无人机/无人车及其系统以及其他元器件共同来控制无人机飞行或无人车,飞控常与IMU(惯性测量单元)、气压计、磁罗盘等元器件共同组成飞行控制系统。图中展示了无人车使用的飞行控制器(Pixhawk4),在这里对无人车常使用的接口做一个介绍:
-
POWER1:飞控的电源接口,由小车底盘电源通过降压模块给到飞控,供电电压为5V。
-
TELEM1:Wifi数传的数据接口,使飞控能够接入Wifi数传提供的局域网中。
-
TELEM2:连接板载计算机的接口,飞控通过TELEM2与板载计算机建立通信连接,板载计算机的控制数据也通过这个接口发送到飞控中。
-
PPM RC:遥控器接收器信号接口,该接口会接收来自遥控器的控制信号。
-
GPS MODULE:GPS模块的接口,给GPS模块进行供电以及接收GPS模块传递的数据。
-
I/O PWM OUT:电机控制的PWM输出口,输出控制数据控制四个电机。
-
激光雷达

激光雷达采用蓝海光电LDS-50C-3 360°激光扫描测距雷达,内部搭载高性能脉冲TOF测距系统,即使在远距离物体条件下,测量精度依旧精准、稳定。激光雷达可以帮助R300实现室内、室外精准避障。
-
T265双目相机

英特尔® 实感™ 追踪摄像头 T265 包含两个鱼眼镜头传感器、一个 IMU 和一个英特尔® Movidius™ Myriad™ 2 VPU。所有的 V‑SLAM 算法都直接在 VPU 上运行,能够实现非常低的延迟和非常高效的功耗。通过视觉与IMU以及V-SLAM算法的结合,T265双目相机能为无人车提供定位数据。
-
D435i深度相机

英特尔® 实感™ D435i在尖端立体深度摄像头中放置了一个IMU。D435i在小巧外形中采用英特尔模块和视觉处理器,是一个功能强大的一体产品,可与可定制软件配合使用,是一款能够了解自身运动的深度摄像头。
-
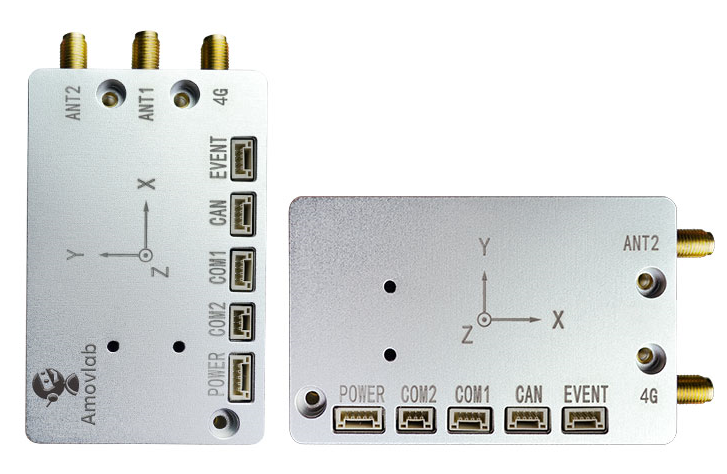
Homer图数传

Homer图数传模块建立起一个局域网,将无人车上的板载计算机、飞控、RTK等车载硬件以及用户的电脑接入到局域网中。方便用户远程访问无人车的飞控和板载计算机,进而实现远程控制以及数据监听。
提示:
放置在车上的Homer称为移动端Homer,与用户PC连接的Homer称为基站端Homer。 -
RTK模块
RTK(Real Time Kinematic),即实时动态测量技术,又称差分GPS。该模块用于在室外定位无人车,其定位精度为厘米级。
提示:
放置在车上的RTK称为移动端RTK; 与地面端Homer连接的称为基站端Homer; 放置在小车上的RTK,并且RTK内部插入4G电话卡称为移动端RTK(4G)。 -
显示器

显示器采用10英寸无触摸屏幕,1024 * 600 分辨率,支持 HDMI接口,适用于树莓派、NX、nano、x86等设备。
-
3S电池
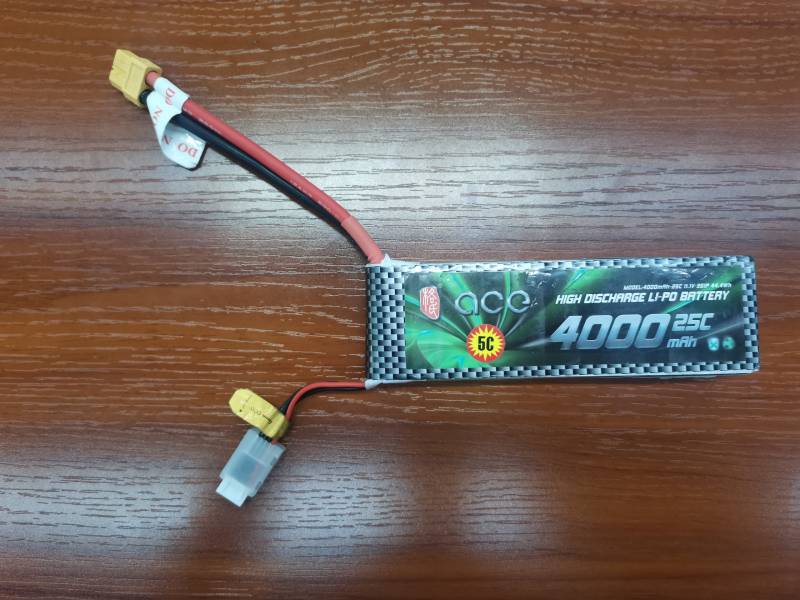
3S电池用于给 基站端Homer 和 基站端RTK 供电。3S电池满电电压12.6V。
警告!
3S电池过充过放容易导致电池损坏,在电压低于11V时建议停止继续使用,待电池冷却至常温后充电,充满电后也不要立即使用,待电池冷却至常温后使用。 -
遥控器
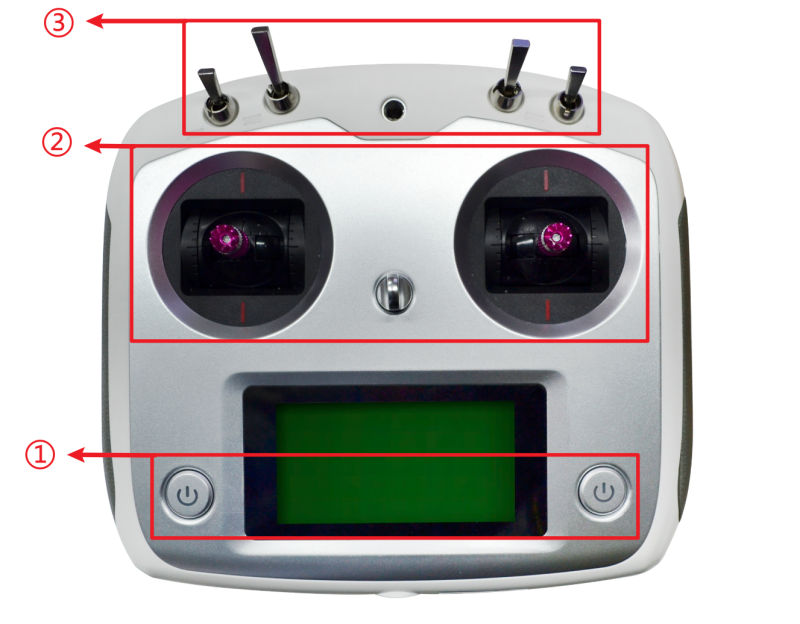
-
开关机按钮:两个按钮同时按下将开启或关闭遥控器,开机时,遥控器上部分的档杆(四个SW*档杆)需 全部打至顶端,关机时,遥控器需与遥控器接收器断开连接(断开遥控器或接收器的电源)。
-
摇杆:左侧摇杆上下移动控制无人车前进后退,右侧摇杆左右移动控制无人车左右移动。
-
档杆:R300无人车中从左往右数第二根档杆(SWB)控制无人车的模式,一共有两档, 中间位置无人车受遥控器控制,顶端位置无人车受板载计算机控制。SWC挡杆控制无人车灯光模式,最上端为呼吸灯模式,中间为常亮模式,最下端为常闭模式。SWD挡杆控制无人车切换高速和低速模式。
硬件连接
-
R300硬件连接图
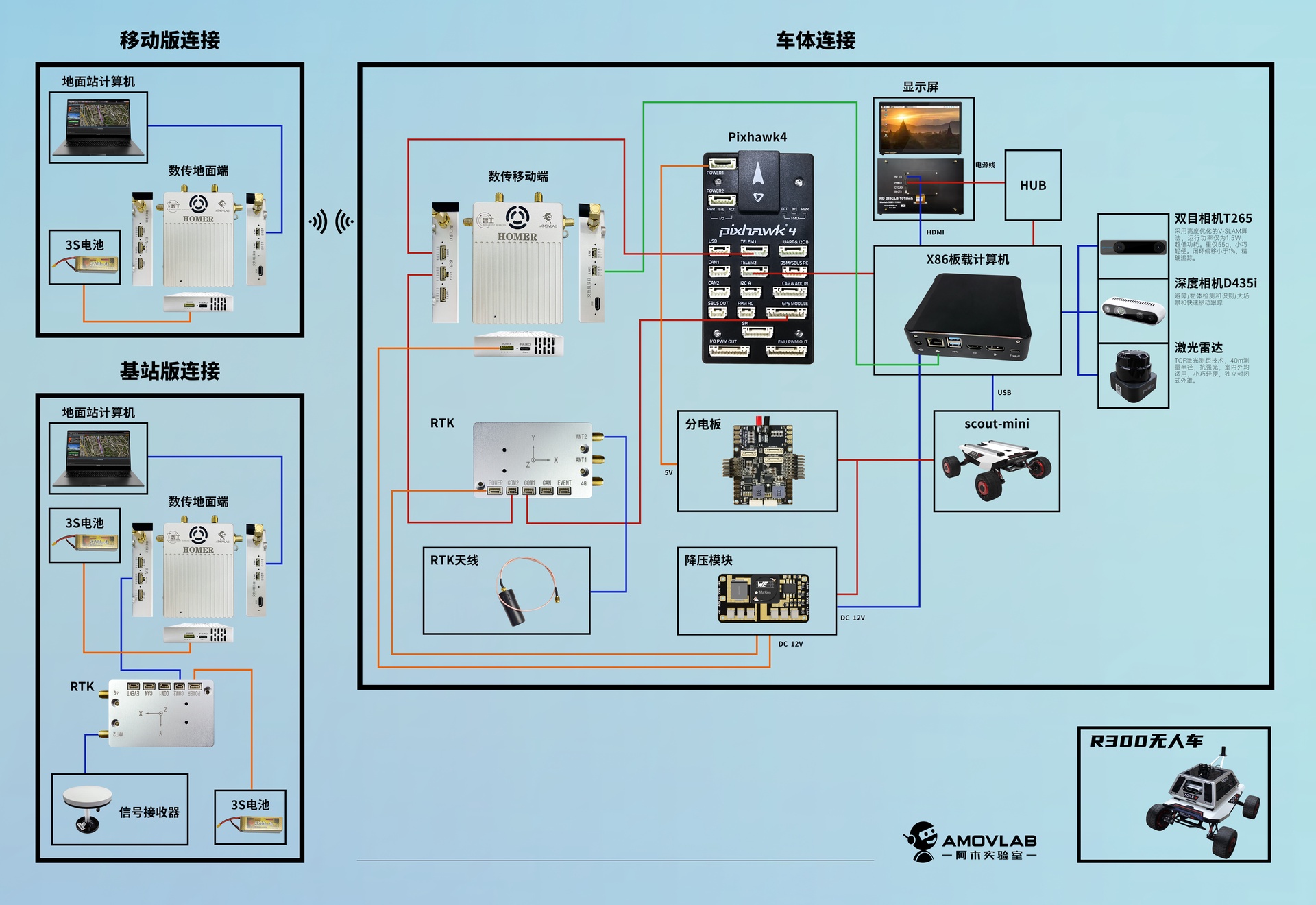
提示:
-
如果您在本页面看不清连接图,可以右键图片保存至本地。
-
车体连接部分已经在车体内部连接好,非必要请勿修改!
-
对于使用R300基站版的用户,请查看基站版连接部分。
-
对于使用R300移动版的用户,请查看移动版连接部分。
-
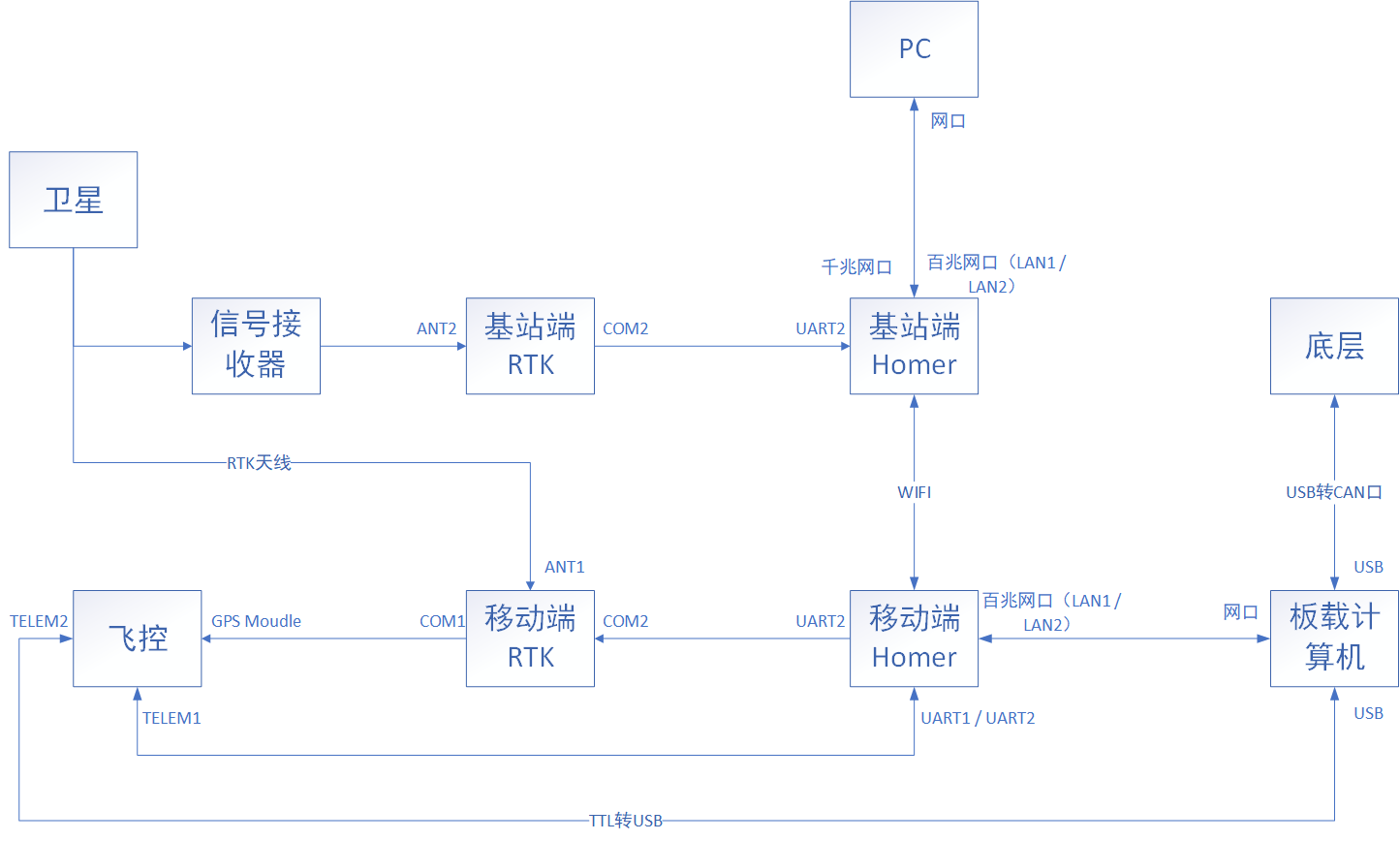
通信链路
-
图数传Homer作为整个通信链路的核心,将各个模块通过 有线/无线 的方式连接起来。
-
PC和板载计算机通信主要通过以下链路: PC<===有线===>基站端Homer<===WIFI===>移动端Homer<===有线===>板载计算机 。其目的是通过远程软件登录到板载计算机,然后通过板载计算机启动相关程序,进而控制车辆。
-
PC和飞控通信主要通过以下链路: PC<==有线===>基站端Homer<===WIFI===>移动端Homer<===串口===>飞控 。其目的是通过PC端上的Mission Planner连接到飞控,从而获取飞控相关参数。
-
飞控如何获取卫星数据:首先,移动端RTK会通过ANT1口天线接收卫星信号;然后再接收来自基站端RTK的纠偏数据,其通信链路为 基站端RTK<===透传===>基站端Homer<===WIFI===>移动端Homer<===透传===>移动端RTK。接着,移动端RTK就会将这个两个来源的数据进行融合,最后将融合后的数据,通过串口的方式,传递到飞控的GPS Moudle口。从而实现了飞控的定位。
-
R300 移动版通信链路
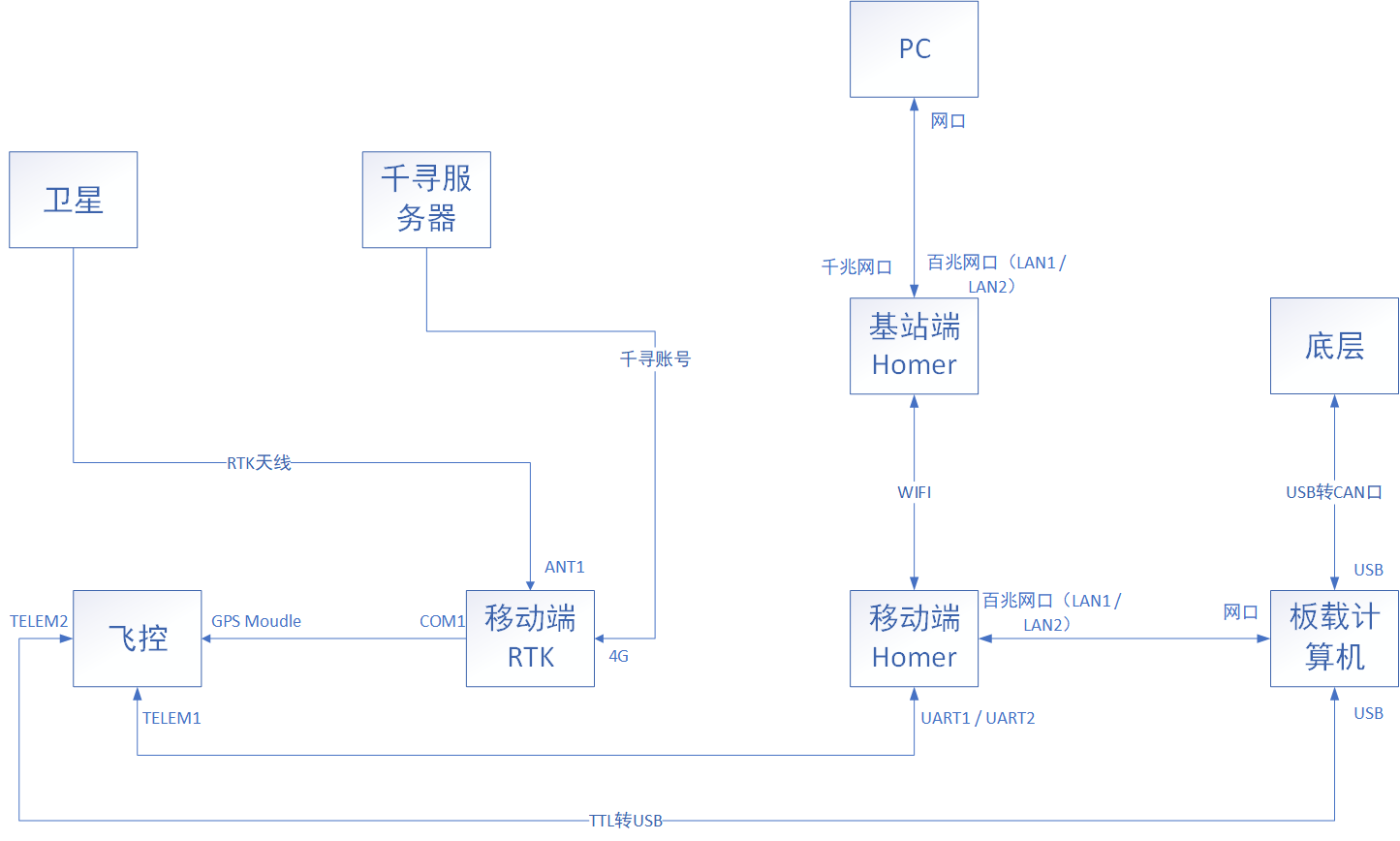
提示:
移动版通信和基站版通信不同之处在于不通过基站RTK获取纠偏数据,而是通过千寻账号登录到其服务器,然后再由服务器进行位置解算,位置解算后,通过4G网络返回到移动版RTK。
术语
-
通过网线与PC端连接的Homer
-
放置在小车上的Homer
-
与地面端Homer连接的RTK
-
放置在小车上的RTK
-
放置在小车上的RTK,并且RTK内部插入4G电话卡
资源下载

快速上手指引
- 以下内容在用户拿到R300的时候已经完成配置和测试,保证功能正常。如果非必要,请勿修改! 以下内容可以作为您二次开发的一个例子
板载计算机设置
设置固定IP
-
将无线/有线键鼠插入R300侧边的USB扩展口,然后打开R300电源
-
输入密码 amov 登录到系统
-
打开桌面右上角 WIFI图标,点击 Wired Connected,找到 Wired Settings,点击菜单栏上的 IPV4 ,选择 Manual ,输入IP 192.168.1.14 ,子网掩码 255.255.255.0 如下图所示:
设置相机序列号
-
在桌面打开终端
-
输入命令
rs-sensor-control该命令将会返回 D435i 和 T265的序列号
-
接着打开目录:
amovcar/src/common/sensor/amovcar_sensor/launch,将会看到以对应传感器命名的launch文件 -
分别打开D435i / T265 的launch文件,把文件中的参数
defalut的值替换成第2步获取到的相机序列号即可。
Homer配置
-
将基站端Homer用3S电池供电,再将专有网口线的一端接入基站端Homer的LAN1或LAN2口,另一端接入到PC的网口。(如果您的PC没有网口,则需要一个USB转网口模块)
警告!
Homer需要用专门的电源线(电源线贴有电源线 12V) 字样的标签,如下图所示: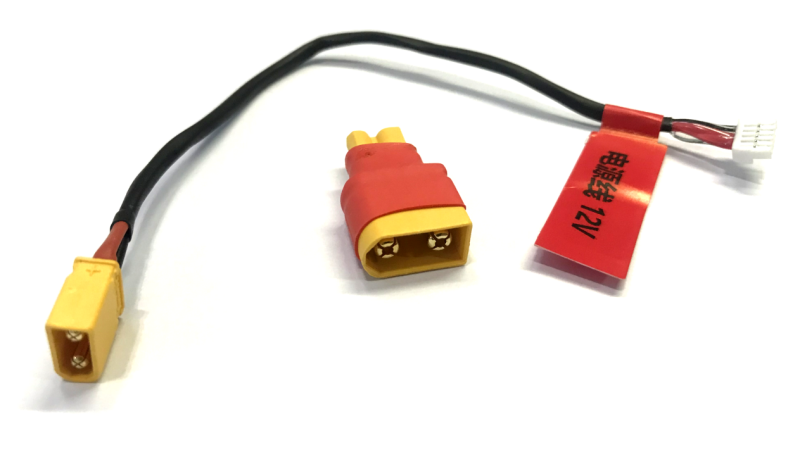
Homer的供电电压为12V
提示:
LAN1或LAN2口为百兆网口。百兆网线如下:
-
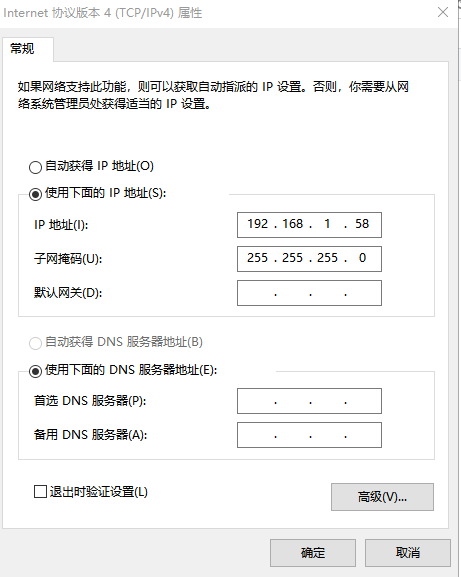
在PC上(Windows系统)打开 控制面板—查看网络状态和任务—更改适配器设置—右键以太网—属性—Internet协议版本4—属性,设置为如下图所示:
-
将移动端Homer和基站端Homer同时通电。基站端Homer用3S电池供电,移动端Homer用小车电源供电。(或者也可以将移动端Homer拆下来,再单独用3S电池供电)
-
基站端Homer配置
-
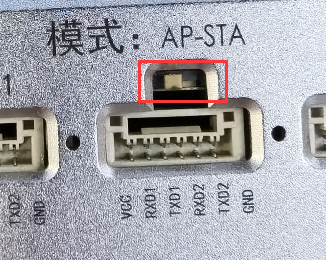
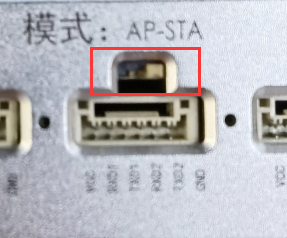
首先将基站端Homer的工作模式,拨到 AP端口,如下图所示:
-
打开浏览器,输入网址 192.168.1.100 进入配置界面
-
用户名和密码均为 admin
-
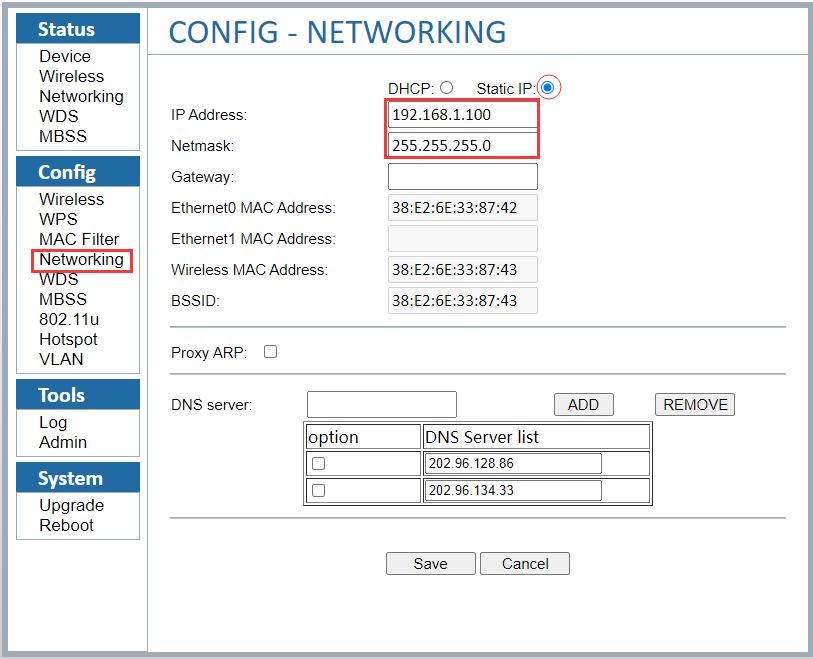
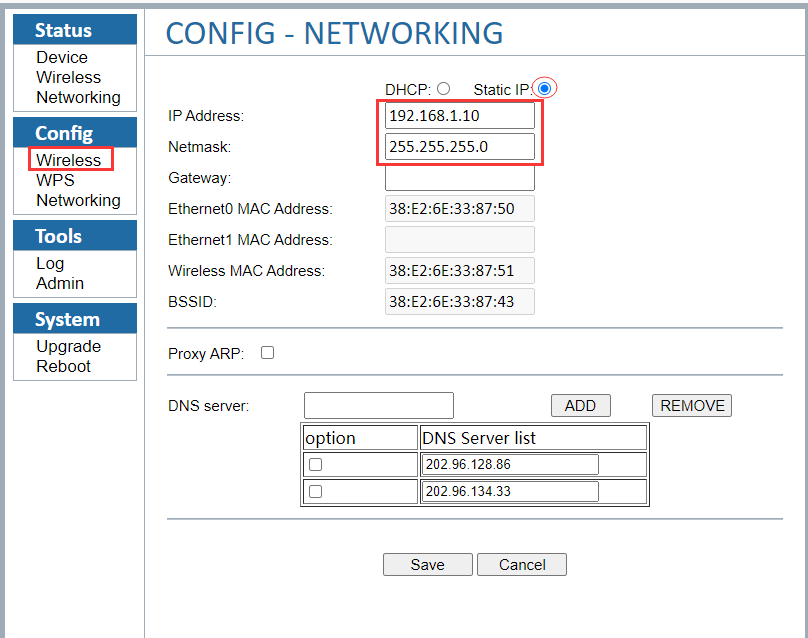
找到 config — Networking,选择界面中的 Static IP 修改为如下图所示:
-
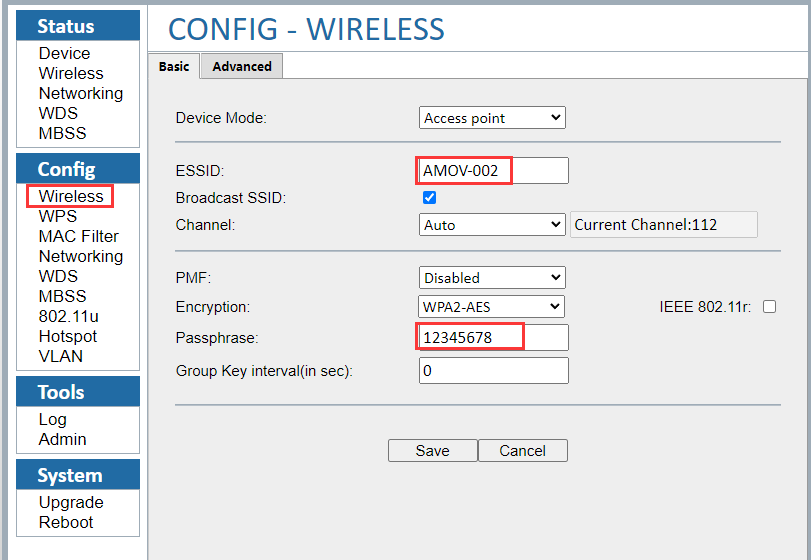
找到 config — Wireless,找到界面中的 ESSID,修改为 AMOV-002;找到界面中的 Passphrase,将密码修改为 12345678。图下图所示:
-
保存
-
-
移动端Homer配置
-
首先将移动端Homer的工作模式,拨到 STA端口,如下图所示:
-
打开浏览器,输入网址 192.168.1.110 进入配置界面
-
用户名和密码均为 admin
-
找到 config — Networking,选择界面中的 Static IP 修改为如下图所示:
-
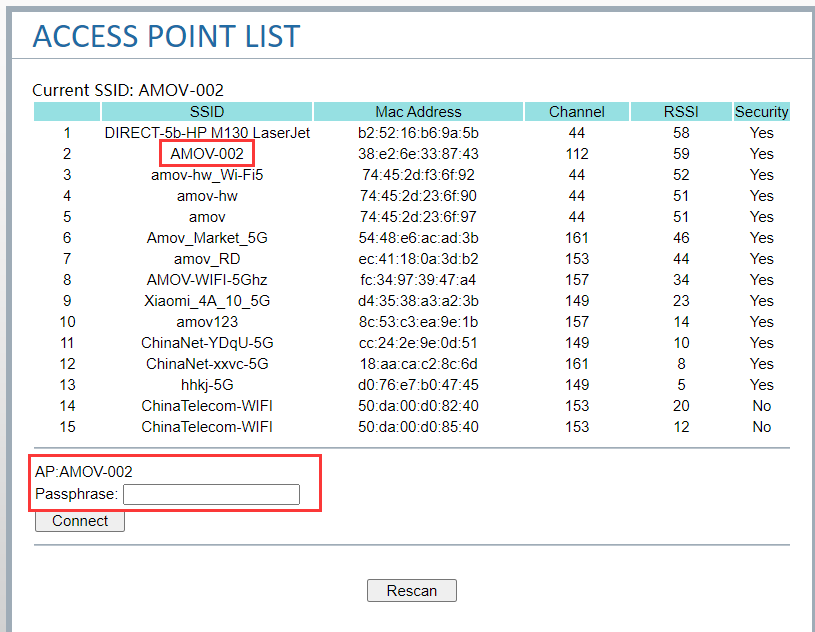
到 config — Wireless,找到界面中的 ESSID 旁边的 Scan AP,此时将会搜索到基站端Homer配置的WIFI名称 AMOV-002,然后输入密码 12345678 点击连接,如下图所示:
-
保存
提示:
确保在配置过程中,两个Homer都通电。当两个Homer正面的绿色指示灯常亮,表示二者正确配置并且互相连接成功。
基站端(AP模式下)的WIFI名称和密码可以根据实际情况自定义。
移动端(STA模式下),在连接上基站端的WIFI以后,一定要点击保存,否则下一次启动将不会自动连接。
-
-
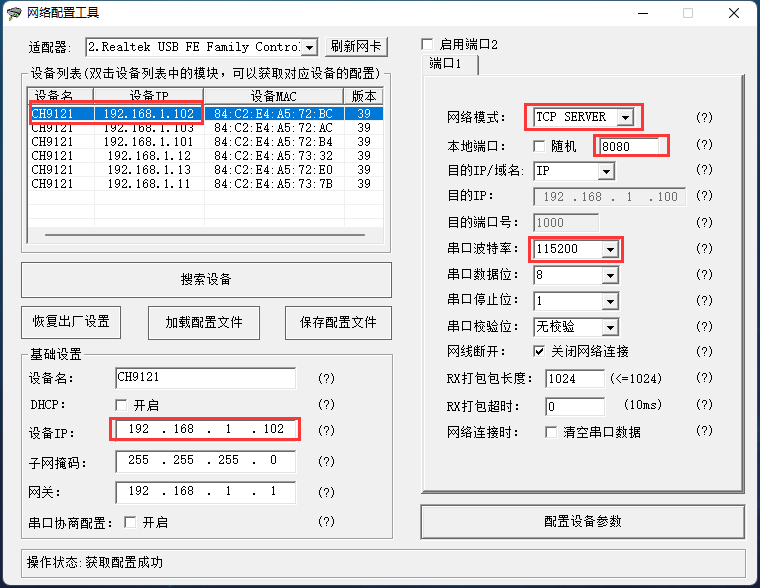
打开Homer配置软件( 点击下载 配置软件)
-
根据实际情况选择网卡设备。然后刷新设备,可以看到当前网络设备。
-
选择102,按照下图设置
-
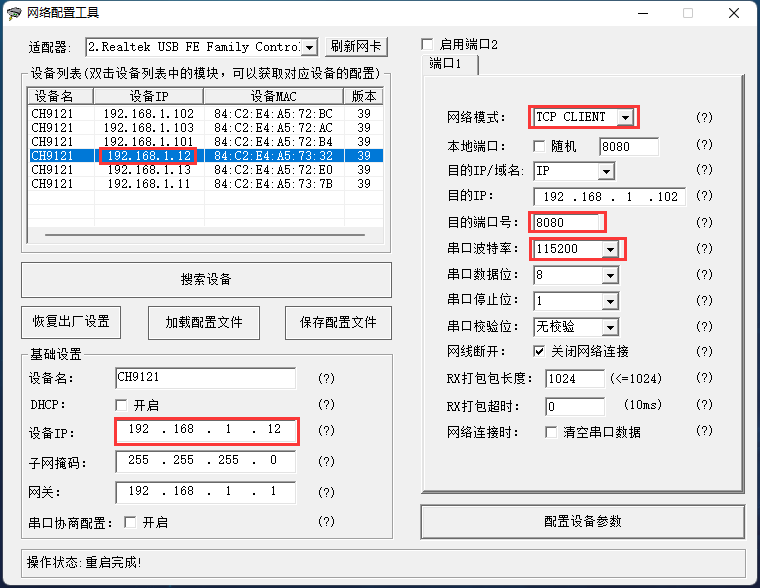
选择12,按照下图设置
-
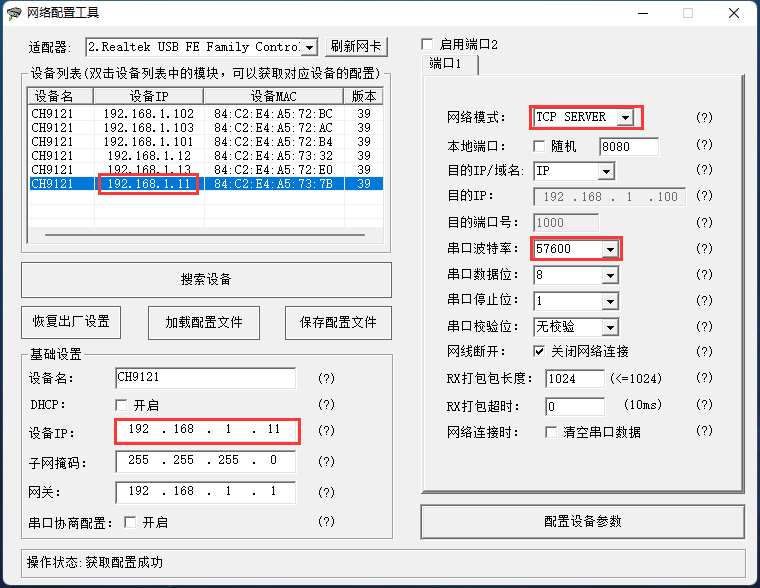
选择11,按照下图设置
提示:
101、102、103为基站端Homer的三个串口的IP地址,这个地址可以根据实际情况自定义。11、12、13为移动端Homer的三个串口的IP地址,这个地址可以根据实际情况自定义。
在上面的配置中,使用移动端Homer的UART1串口(192.168.1.11)与飞控通信。
在上面的配置中,使用移动端Homer的UART2(192.168.1.12) / UART3(192.168.1.13) 串口与移动版RTK通信。
警告!
在配置RTK时,所有的RTK天线禁止热插拔,即必须先断电,后插拔RTK天线。 -
移动端RTK配置
- 采用默认驱动,无需配置
基站端RTK配置
-
将基站端RTK用USB数据线连接至PC。
-
通电(对于移动端RTK,可以使用R300电源供电,也可以拆下后单独用3S电源供电)。
警告!
RTK供电线和Homer供电线不兼容,不能混用。必须使用专门的电源线。如下所示: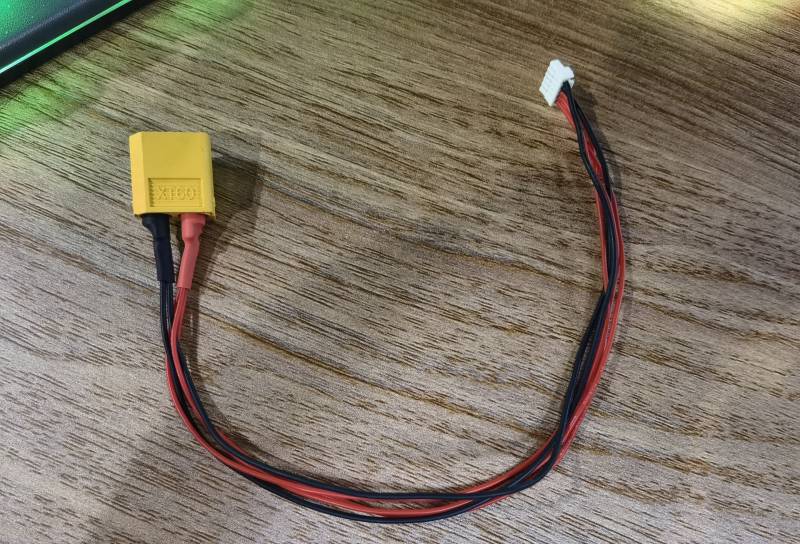
RTK的供电电压为12V。
-
在PC上打开浏览器,输入 192.168.42.129 进入配置界面。
-
输入用户名 admin, 密码 password 登录到配置界面。
-
在页面左边找到 系统配置—网页命令 在对话框中输入命令
posave auto点击提交。
-
然后输入
saveconfig点击提交。
-
在页面左边找到 I / O配置—端口摘要 ,点击 COM2,即可进入COM2的配置界面。
-
在 输出 栏下面找到 RTCM,将其改为 启用 ,点击确定即可。
移动端RTK(4G)配置
-
将移动端RTK天线接入到移动端RTK的ANT1口,将小天线(又称小辣椒)接入到移动端RTK的4G接口,并插入4G卡。
-
通电(对于移动端RTK,可以使用R300电源供电,也可以拆下后单独用3S电源供电)
警告!
RTK供电线和Homer供电线不兼容,不能混用。必须使用专门的电源线。如下所示: RTK的供电电压为12V。
-
用USB数据线,一端接在移动端RTK的USB口,一端接在PC上
-
在PC上打开浏览器,输入 192.168.42.129 进入配置界面
-
输入用户名 admin, 密码 password 登录到配置界面
-
在该页面,您可以看到当前RTK的工作状态,包括卫星观测值质量、跟踪卫星数量、以及定位方式等
-
在页面左边的菜单栏找到 I/O配置,点击COM4口,进入如下图所示的配置

提示:
R300产品不提供千寻、六分账号,如果您有这方面的需求,点击阿木实验室淘宝店铺,获取更多信息。
R300软件框架
-
amovcar文件结构图如下:
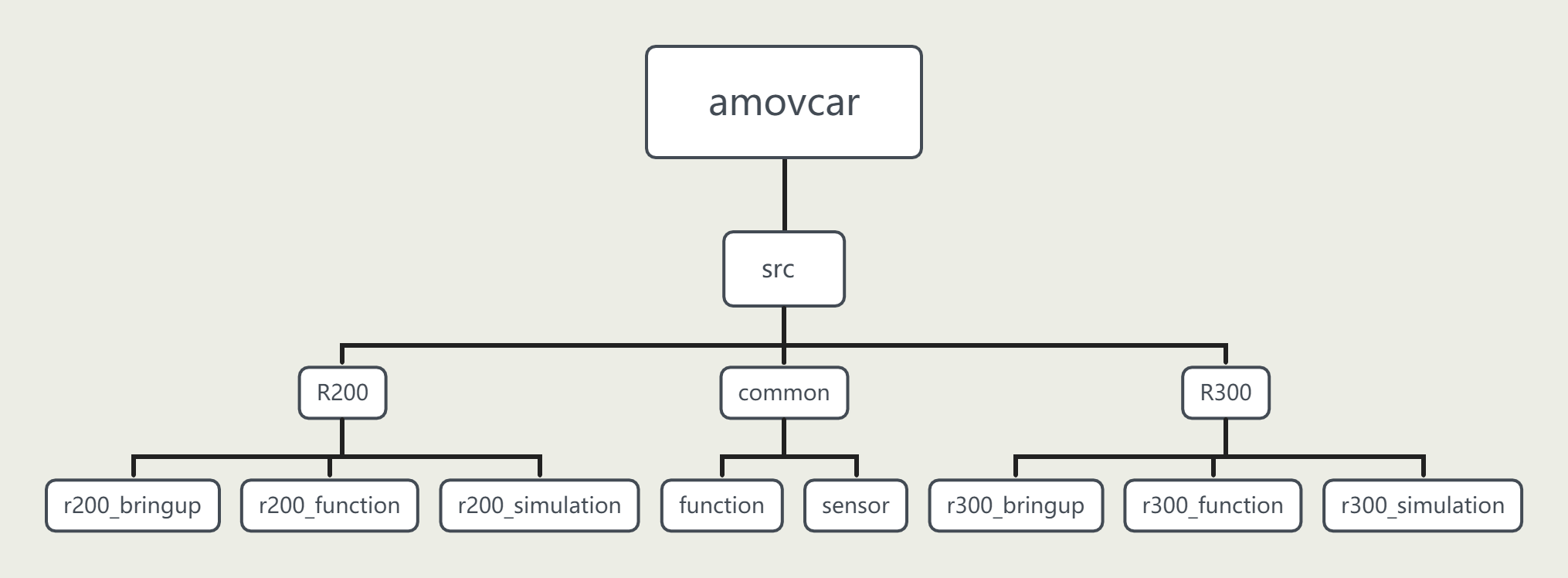
amovcar
- amovcar文件夹为ROS下的工作空间文件夹,包含无人车几乎所有的源代码文件,无人车功能包均放置在src文件夹下。
common
- common文件夹内含有R200以及R300两款无人车通用的一些功能包,包含一些功能模块以及二维激光雷达、三维激光雷达、相机等传感器驱动ROS功能包。
R200
-
R200文件夹内含有
r200_bringup、r200_function、r200_simulation三个功能包。r200_bringup为R200小车底盘的驱动功能包,R200下位机控制板为飞控,通过mavros连接飞控与板载计算机,r200_bringup在mavros上做了一层封装。
r200_function文件内含有R200无人车所有功能的源代码,包含自启动服务、配置文件、launch文件、sh脚本文件以及源代码等内容。
r200_simulation文件内含有R200无人车仿真的源代码,包含模型、gazebo环境、launch文件、配置文件等内容。
R300
-
R300文件夹内含有
r300_bringup、r300_function、r300_simulation三个功能包。r300_bringup为R300小车底盘的驱动功能包。
r300_function文件内含有R300无人车所有功能的源代码,包含自启动服务、配置文件、launch文件、sh脚本文件以及源代码等内容。
r300_simulation文件内含有R300无人车仿真的源代码,包含模型、gazebo环境、launch文件、配置文件等内容。
传感器校准
提示:
传感器在用户拿到R300的时候已经完成校准,保证功能正常。如果非必要,请勿修改! 以下内容可以作为您二次开发的一个例子传感器的校准需要下载 Mission-Planner 。
Mission Planner介绍
-
Mission Planner 是一个功能完善的地面站应用程序,仅仅与Windows兼容,暂时不支持Linux系统。主要用于连接飞控,与飞控之间进行通信,并且实时显示飞控相关数据。点击 这里 可以获取更多有关Mission Planner相关信息。

-
Mission Planner的顶部工具栏如下

飞行数据:飞行数据界面内容主要展示无人车飞控相关数据包含GPS数据状态,EKF定位状态,无人车当前模式,解上锁状况,无人车相关数据,地图等
飞行计划:在该界面可画出无人车的航点,将航点传入到飞控中,修改航点相关的参数,读取飞控的航点等内容。
初始设置:传感器校准就需要在此界面设置,一般来说,需要校准的传感器为罗盘,加速度计,平面校准等。
提示:
某些版本地面站在传感器校准时会发生异常,出现该情况时,请更换地面站版本进行传感器校准。配置/调试:查看以及修改飞控的参数。
警告!
参数修改需充分了解APM以及Mission Planner相关基础知识,需谨慎使用,修改错误将导致无人车无法正常运行。
飞控固件
-
R300的飞控固件为阿木实验室定制版本,暂不开源
警告!
若非必要,请勿升级R300的固件,由升级固件后所导致的R300功能无法正常使用,请自行解决!
刷入飞控参数
-
点击 飞控参数 可以下载飞控参数,提取码为 amov
-
将飞控用USB数据线,一端连接飞控USB端口,一端连接PC(Win7 / Win10 均可)
-
打开Mission Planner软件
-
在右上角选择端口号 COMx ,波特率为 115200,点击连接
-
点击顶部工具栏的 配置—全部参数表—加载—选择下载好的参数—写入参数,如下图所示:
提示:
COMx 端口号取决于实际使用情况,飞控参数写入以后,需要重启生效。警告!
若非必要,请勿修改R300飞控参数,如果您修改部分参数后导致R300功能无法正常使用,请自行解决!警告!
在进行传感器校准之前,确保您已经刷入了R300的飞控固件以及飞控参数。
加速度计与指南针的校准
- 在出厂测试时,传感器已经校准过,用户无需校准
SLAM
提示:
在您阅读此内容之前,确保您已经阅读了快速上手指引内容,并了解通信链路 。
Gmapping
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成
-
打开遥控器
-
在PC上打开 No Machine 软件,输入 192.168.1.14 远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP。 -
输入密码 amov 登录到板载计算机
-
打开板载计算机桌面的 sh 文件夹后,右键选择 open terminal
-
输入命令
bash r300_slam_gmapping.sh启动Gmapping建图脚本。 -
将遥控器上的档杆SWB拨至中间位置,开始控制R300移动建图
-
完成建图后,打开一个终端,输入命令
rosrun map_server map_saver -f ~/map保存地图
提示:
-f 参数后面表示地图保存的地址和文件名称,为绝对路径。上面这个指令,将地图保存在 根目录下,并且命名为map。
Cartographer
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成
-
打开遥控器
-
在PC上打开NoMachine软件,输入192.168.1.14远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP。 -
输入密码amov登录到板载计算机
-
打开板载计算机桌面的sh文件夹后,在文件夹内右键选择open terminal
-
输入命令
bash r300_cartographer_slam.sh启动Cartographer建图脚本。
-
将遥控器上的档杆SWB拨至中间位置,开始控制R300移动建图
-
完成建图后,打开桌面的 sh 文件夹,然后在文件夹内右键选择 open terminal。接着,输入命令
bash r300_cartographer_map_save.sh保存地图。
提示:
该脚本将地图默认保存在 /home/amov/amovcar/src/R300/r300_function/maps/ 下。地图的默认名称为 r300_map。使用脚本保存地图会覆盖上一次的地图文件。如果需要多次仿真建图对比,将每次保存的地图单独放在一个文件夹中。
如果您想将地图保存在其他位置,打开脚本,修改文件路径即可。
Cartographer Demo
-
R300的功能包里面提供了一个简单的Cartographer纯激光建图的Demo,其bag文件放在
/home/amov/amovcar/src/R300/r300_function/bag/pure_slam.bag可以通过这个bag,对Cartographer的配置文件进行配置,从而进行建图的调试。打开终端,输入以下命令:roslaunch r300_function r300_cartographer_demo.launch bag_filename:=/home/amov/amovcar/src/R300/r300_function/bag/pure_slam.bag当然,您也可以选择播放自己的bag文件,然后通过修改配置文件,查看不同的建图效果
当bag播放完毕,打开终端,输入以下命令:
roscd r300_function/demo_map bash map_save.sh保存地图
提示:
该脚本将地图默认保存在/home/amov/amovcar/src/R300/r300_function/demo_map/下。地图的默认名称为 demo_map使用脚本保存地图会覆盖上一次的地图文件。如果需要多次仿真建图对比,将每次保存的地图单独放在一个文件夹中。
如果您想将地图保存在其他位置,打开脚本,修改文件路径即可。
下图为该bag的建图结果提示:
如果您R300的桌面上sh文件夹内没有相关脚本文件,请更新最新代码。代码地址见gitee,选择分支为v1.0-beta更新代码以后,与Cartographer相关的脚本文件均在
/amovcar/src/R300/r300_function/sh/目录下,您可以将上述相关脚本放置在桌面的sh文件中,方便您的使用。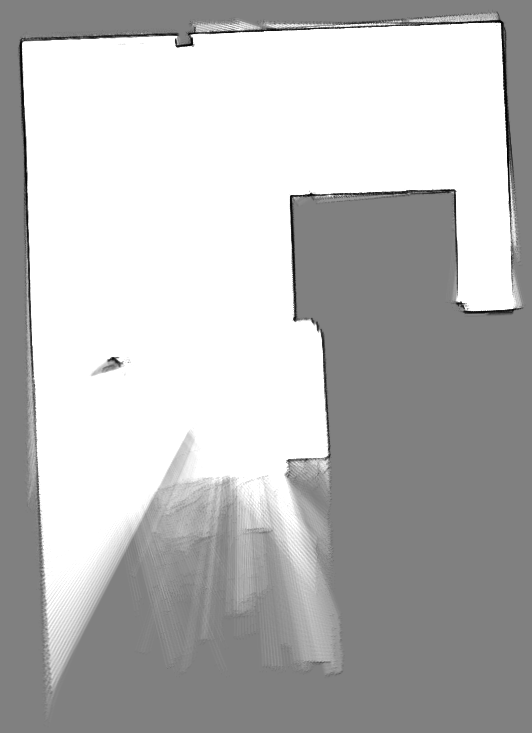
三维建图
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成
-
打开遥控器
-
在PC上打开 No Machine 软件,输入 192.168.1.14 远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP。 -
输入密码 amov 登录到板载计算机
-
打开板载计算机桌面的 sh 文件夹后,右键选择 open terminal
-
输入命令
bash r300_rtabmap.sh启动三维建图脚本。
-
将遥控器上的档杆SWB拨至中间位置,开始控制R300移动建图
-
完成建图后,打开一个终端,输入命令
rosrun map_server map_saver -f ~/map_name保存地图
提示:
如果节点启动异常,请确保相机序列号设置正确。如果相机序列号正常,仍然存在启动失败的情况,请删除amovcar目录下的 devel 和 build 两个文件夹,然后重新编译整个项目。
导航
室内导航
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成
提示:
在进行导航功能之前,确保您已经完成SLAM相关工作,有一张地图。 -
打开遥控器
-
在PC上打开 No Machine 软件,输入 192.168.1.14 远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP -
输入密码 amov 登录到板载计算机
-
打开板载计算机桌面的 sh 文件夹后,右键选择 open terminal
-
输入命令
bash r300_navigation_indoor.sh启动室内导航建图脚本。
-
在启动的 rviz 界面顶部的菜单栏中,选择 2D Pose Estimate,将机器人放置在地图中的实际位置,然后用遥控器控制E300前后左右稍微移动,待R300周围的粒子聚集即可。
-
在启动的 rviz 界面顶部的菜单栏中,选择 Navigation Goal,单击地图以设置机器人的目的地,然后将绿色箭头指向机器人在目标点将要面对的方向。
-
将遥控器上的档杆SWB拨至顶部,R300将会开始导航
室外Navigation避障
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成。
提示:
在进行室外Navigation避障之前,请将小车移动到开阔地带,便于卫星定位,以达到较好的效果。 -
打开遥控器
-
在PC上打开 No Machine 软件,输入 192.168.1.14 远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP。 -
输入密码 amov 登录到板载计算机
-
在PC上打开 Mission Planner 软件,在右上角选择连接方式为 TCP,波特率为 57600
-
在弹出的对话框输入飞控IP地址 192.168.1.11,端口号为 8080
-
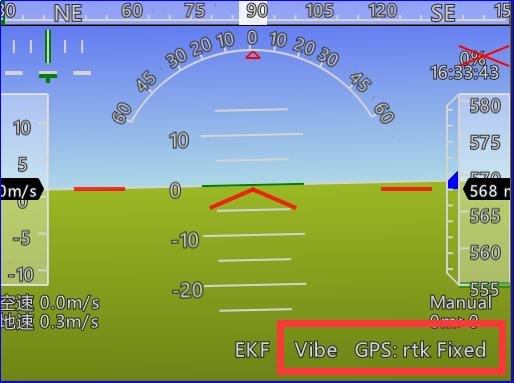
飞控连接上以后,等待GPS进入 rtk fixed状态,并且EKF没有报红。如下图所示:
-
打开板载计算机桌面的 sh 文件夹后,右键选择 open terminal
-
输入命令
bash r300_navigation_outdoor.sh启动室外navigation避障脚本。
-
在启动的 rviz 界面顶部的菜单栏中,选择 Navigation Goal,单击地图以设置机器人的目的地,然后将绿色箭头指向机器人在目标点将要面对的方向。
-
将遥控器上的档杆SWB拨至顶部,R300将会开始导航
室外航点规划及避障
-
将小车上电,等待板载计算机、飞控、移动端RTK、移动端Homer启动完成
-
打开遥控器
-
在PC上打开 No Machine 软件,输入 192.168.1.14 远程连接到板载计算机。
提示:
板载计算机的固定IP,取决您如何设置板载计算机IP -
输入密码 amov 登录到板载计算机
-
在PC上打开 Mission Planner 软件,在右上角选择连接方式为 TCP,波特率为 57600
-
在弹出的对话框输入飞控IP地址 192.168.1.11,端口号为 8080
-
飞控连接上以后,等待GPS进入 rtk fixed状态,并且EKF没有报红。如下图所示:
-
点击Mission Planner工具栏上的 飞行计划,在地图界面规划航点,然后点击右边的写入航点按钮
-
打开板载计算机的终端
-
输入命令
roscd r300_function/sh bash r300_navigation_wp_goal.sh启动室外航点规划及避障功能。
-
打开一个新的终端,输入命令
rosservice call /mavros/mission/pull -
打开第10步启动的终端界面,在最后一个标签页中, 先输入1获取航点信息,等获取到航点信息后,再次输入1启动,如下图所示
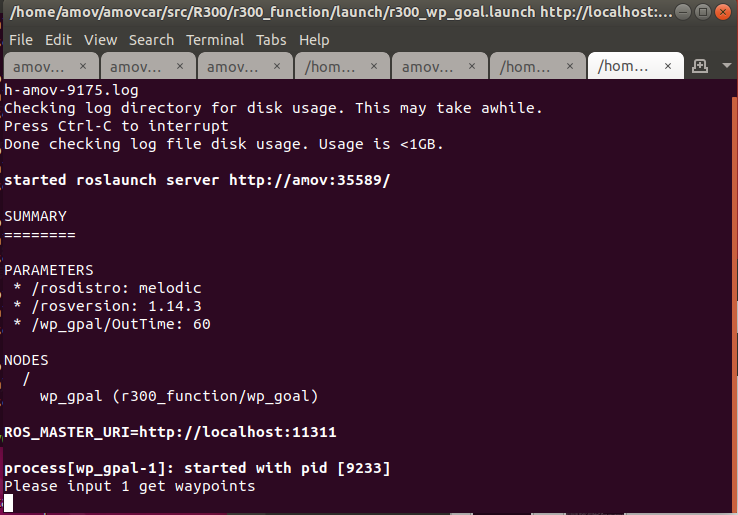
-
将遥控器上的档杆SWB拨至顶部,让R300受板载计算机的控制,开始执行航点规划
提示:
使用室外航点规划及避障,需要更新最新版本的代码。代码地址见gitee,选择分支为v1.0-beta
仿真
仿真系统介绍
-
R300仿真系统基于ROS以及Gazebo仿真系统搭建,提供无人车车体模型,并提供二维激光雷达、三维激光雷达以及深度相机等传感器仿真,目前配备有navigation导航功能,RtabMap三维建图功能,OctoMap三维建图功能,SLAM建图功能的仿真。
提示:
R300仿真对CPU配置有一定的要求,较早的CPU例如i3、部分i5可能存在卡的情况。不建议在R300的板载计算机上进行仿真操作。
仿真环境搭建
-
打开终端,输入以下命令,安装仿真环境
sudo apt install ros-melodic-gmapping ros-melodic-navigation ros-melodic-amcl ros-melodic-map-server ros-melodic-move-base ros-melodic-rtabmap ros-melodic-octomap -y
SLAM
Gmapping
-
打开终端,输入命令
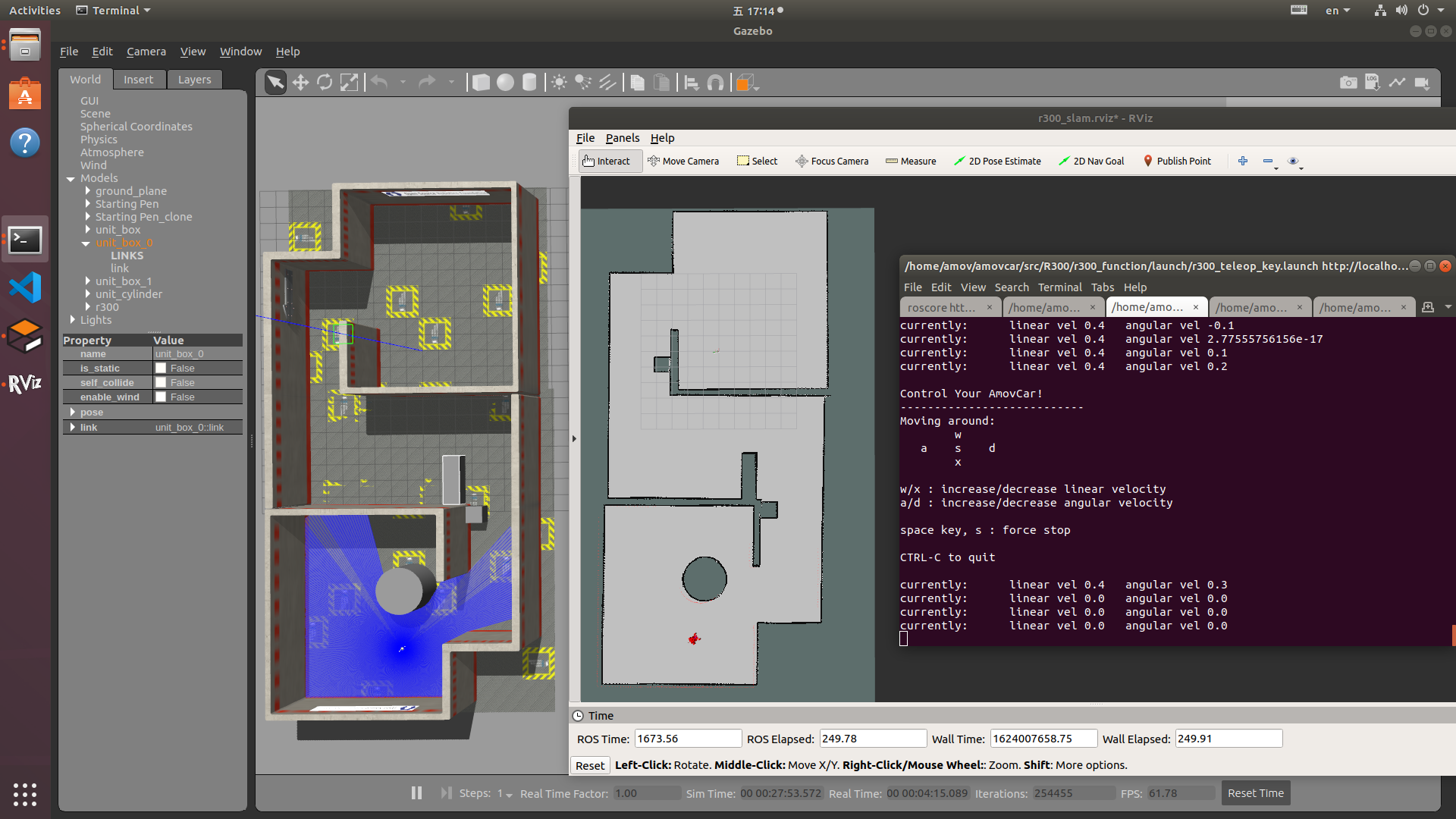
roscd r300_simulation/sh bash r300_simulation_slam_gmapping.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。
-
然后在第三个终端界面,通过键盘控制R300的移动,进行建图。如下图所示:
-
建图完成以后,打开一个新的终端,输入命令
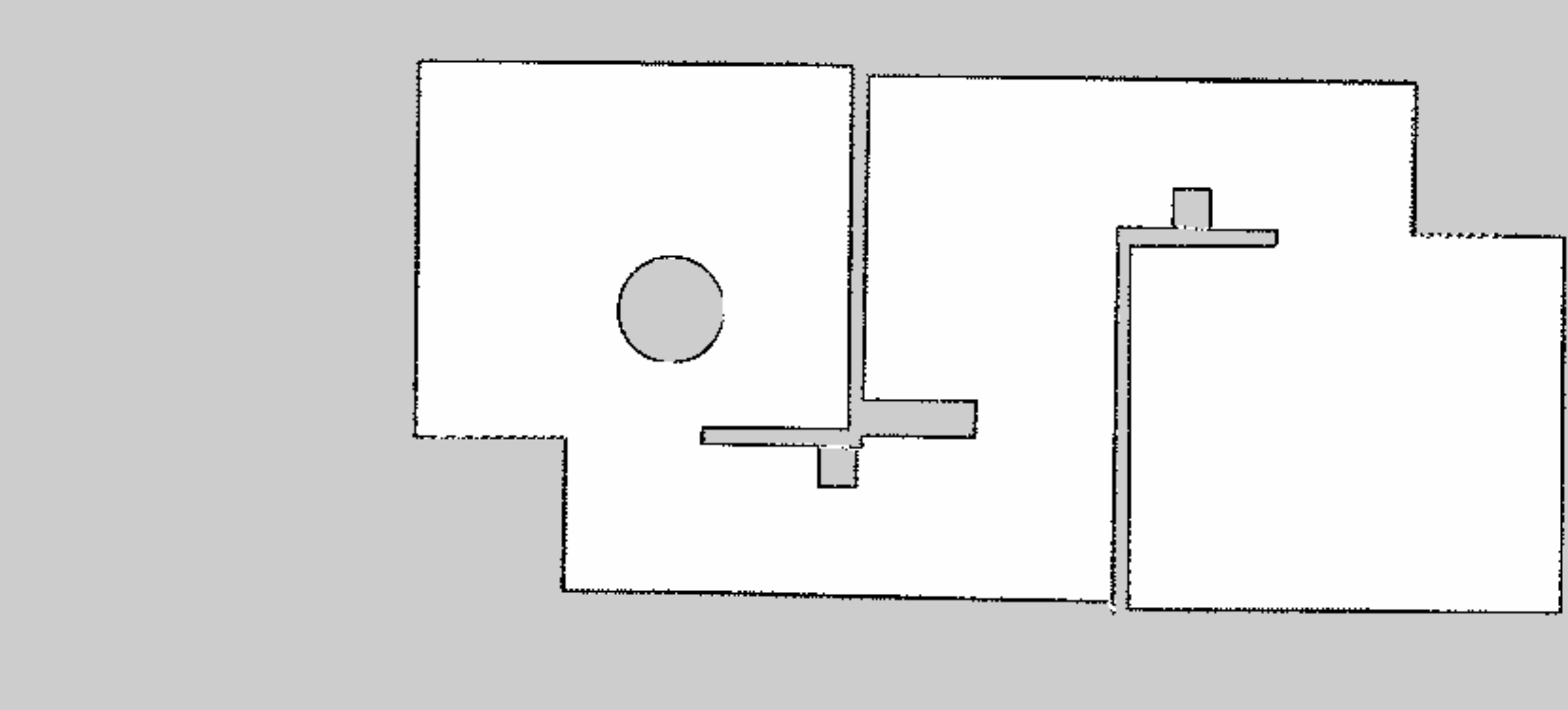
rosrun map_server map_saver -f ~/sim_map提示:
如果您提前启动了roscore,那么第一个终端将会报错,属正常情况。-f参数后面表示地图保存的地址和文件名称,为绝对路径。上面这个指令,将地图保存在 根目录下,并且命名为map。
-
下图为构建好的仿真地图
Cartographer
-
打开终端,输入命令
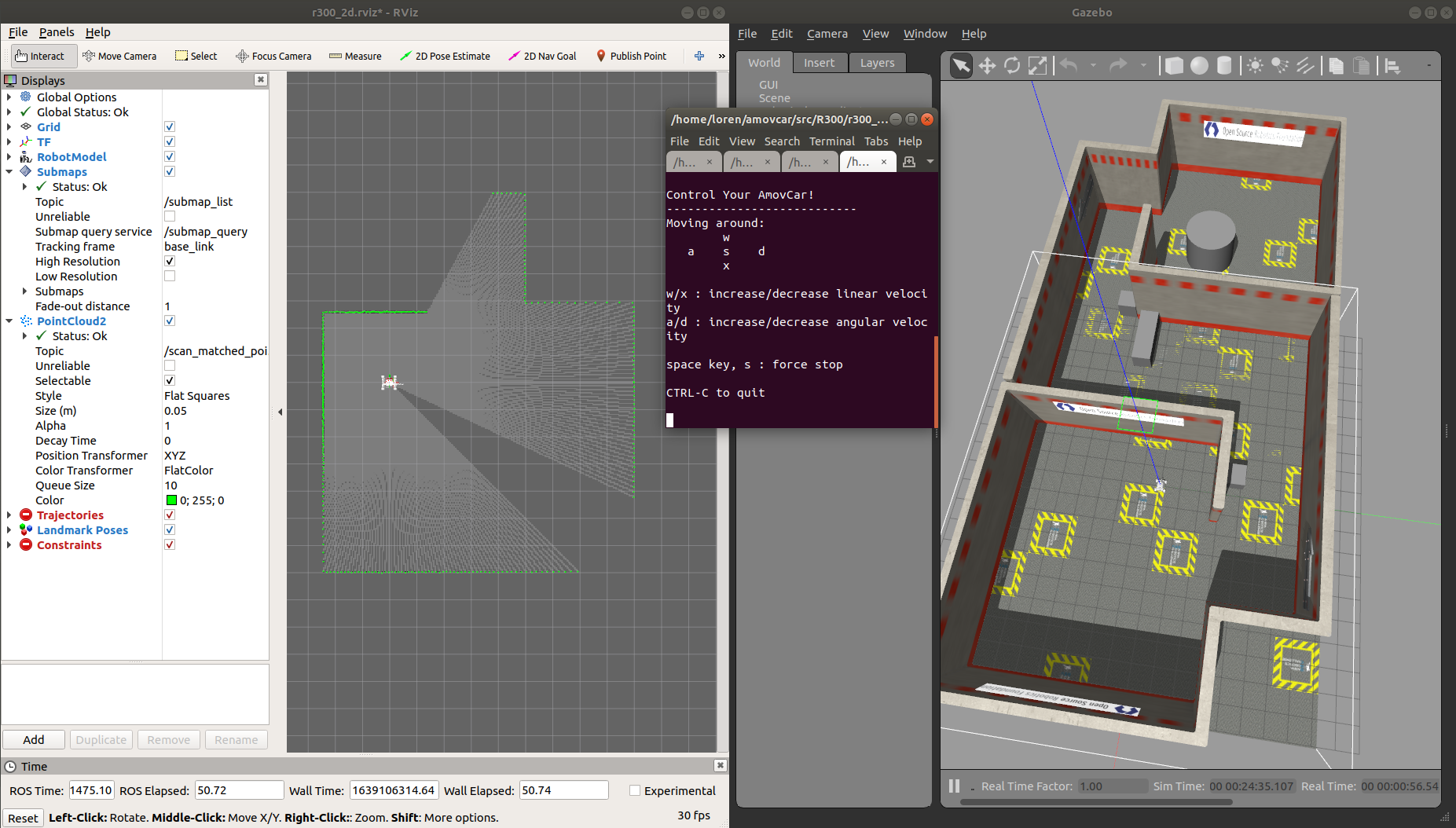
roscd r300_simulation/sh bash r300_simulation_slam_cartographer.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。
-
然后在最后一个终端界面,通过键盘控制R300的移动,进行建图。如下图所示
-
建图完成以后,打开一个新的终端,输入命令
roscd r300_simulation/sh bash r300_cartographer_map_save.sh提示:
该脚本将地图默认保存在/home/amov/amovcar/src/R300/r300_simulation/maps/下。地图的默认名称为sim_map使用脚本保存地图会覆盖上一次的地图文件。如果需要多次仿真建图对比,将每次保存的地图单独放在一个文件夹中。
如果您想将地图保存在其他位置,打开脚本,修改文件路径即可。
如果您提前启动了
roscore,那么第一个终端将会报错,属正常情况。下图为构建好的仿真地图:
Navigation
-
打开终端,输入命令
roscd r300_simulation/sh bash r300_simulation_navigation.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。如下图所示:
-
确认终端均没有报错,在第三个终端内,用键盘控制小车稍微移动。待R300周围粒子收敛以后,按下 ctrl+ c,关闭该终端。
-
在启动的 rviz 界面顶部的菜单栏中,选择 Navigation Goal,单击地图以设置机器人的目的地,然后将绿色箭头指向机器人在目标点将要面对的方向。
-
R300开始导航如下所示:
RtabMap三维建图
-
打开终端,输入命令
roscd r300_simulation/sh bash r300_simulation_rtabmap.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。
-
确认终端均没有报错,在第三个终端内,用键盘控制小车移动进行建图。
-
建图完成以后,输入命令
rtabmap-databaseViewer ~/.ros/rtabmap.db保存地图
-
仿真rtabmap如下:
提示:
查看地图的命令为rtabmap-databaseViewer ~/.ros/rtabmap.db输入查看地图命令后会跳出一个对话框,点击菜单栏上的view—occupancy grid>即可查看地图
地图保存的路径为 ~/.ros/rtabmap.db
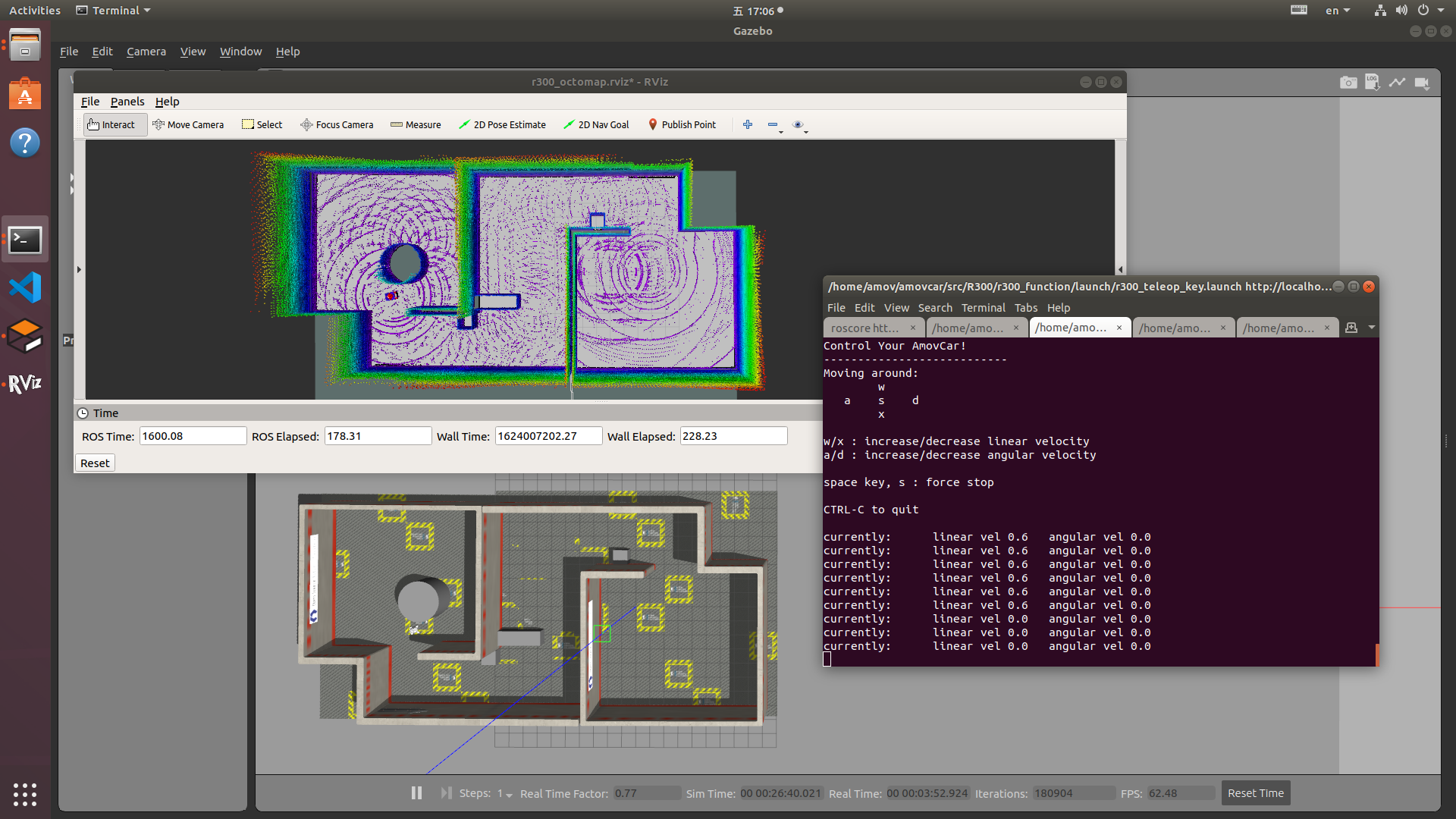
OctoMap三维建图
-
打开终端,输入命令
roscd r300_simulation/sh bash r300_simulation_octomap.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。
-
确认终端均没有报错,在第三个终端内,用键盘控制小车移动进行建图。如下图所示:
-
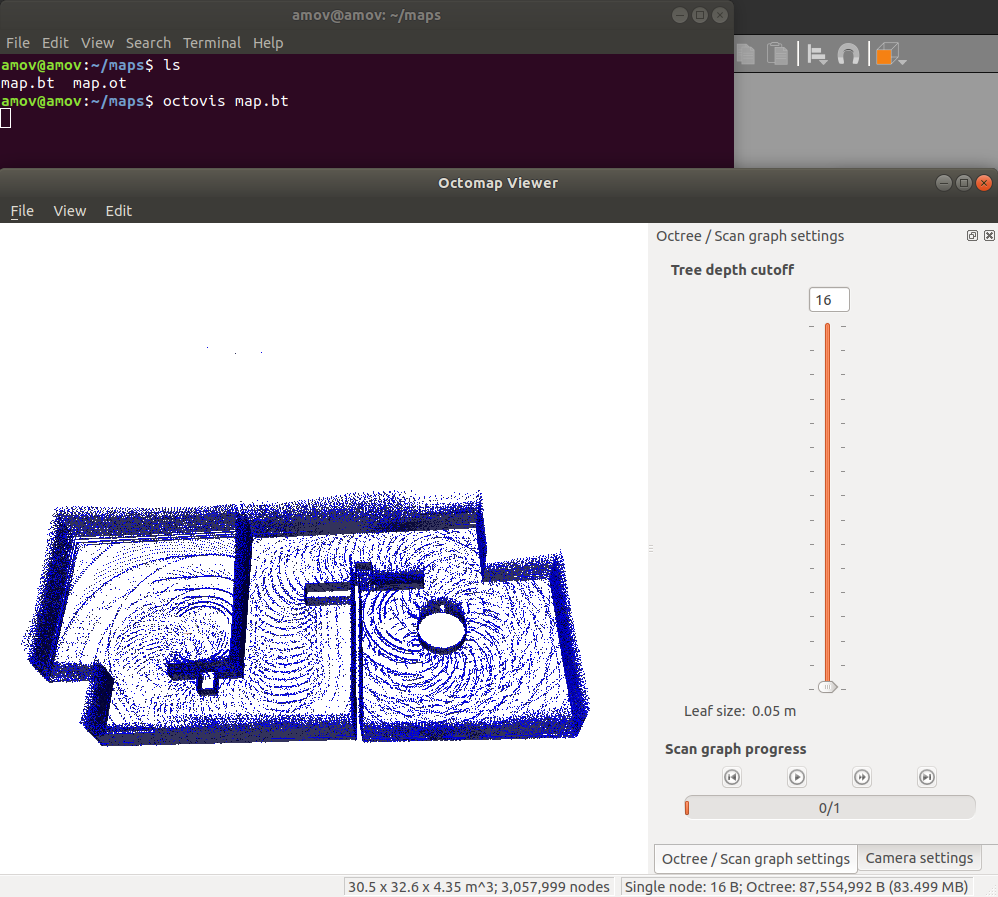
建图完成以后,输入命令
rosrun octomap_server octomap_saver -f ~/map_name.ot保存地图。
提示:
-f参数后面表示地图保存的地址和文件名称,为绝对路径。上面这个指令,将地图保存在根目录下,并且命名为map_name.ot。生成地图文件会耗费一定时间,示例中地图文件生成耗费时间大概在5秒左右。
-
输入命令
octovis map_name.ot查看三维地图。
提示:
需在保存地图的文件夹路径下输入命令查看oct地图需要安装相关功能包
sudo apt install octovis -
仿真Octomap地图如下:
免责声明
注意!!!
-
为保护用户的合法权益,请您在使用本产品前务必仔细阅读本产品提供的使用文档 wiki 、免责声明和安全须知。阿木实验室保留对上述文档进行更新的权利。请您务必按照说明书和安全须知操作本产品。
-
本产品不适合未满 18 周岁及其他不具备完全民事行为能力的人士使用,请您避免上述人士接触本产品,在有上述人士出现的场合操作时请您格外注意。
-
本产品为科研教育性产品,源码开源支持二次开发,并非稳定的商业产品,使用时需有一定的基础,且稳定程度不能和商业产品相提并论。购买产品表示您知晓并理解此产品的特殊性。二次开发有一定门槛,需要使用者具备一定的开发能力、自主学习能力。
-
一旦开始使用本产品,即视为您已阅读、理解、认可和接受本产品的说明书、免责声明和安全须知的全部条款和内容。使用者承诺对自已的行为及因此而产生的所有后果负责。使用者承诺仅出于正当目的使用本产品,并且同意本条款及阿木实验室可能制定的任何相关政策或者准则。
-
在使用本产品的过程中,请您务必严格遵守并执行包括但不限于说明书和安全须知里的要求。对于违反安全须知所提示的使用行为或不可抗因素导致的一切人身伤害、事故、财产损失、法律纠纷,及其他一切造成利益冲突的不利事件,均由用户自己承担相关责任和损失,阿木实验室将不承担任何责任。
-
用户使用本产品直接或间接发生的任何违反法律规定的行为,阿木实验室将不承担任何责任。
-
在使用本产品前,请仔细阅读本文说明。一旦您开始使用本产品,表示您对本文全部内容的认可和接受。请严格遵守本文安装和使用说明。因用户不当使用、安装、私自改装等造成的任何结果和损失,阿木实验室将不承担法律责任。
安全指导手册
注意!!!
-
本产品不适合未满 18 周岁及其他不具备完全民事行为能力的人士使用
-
本产品具有较大的车身尺寸、高速旋转的转动轮和强大的前行动力,在运行时具有一定的危险性。未按要求操作和使用本产品可能会发生危险和伤害
-
使用本产品时,请远离机场、铁路、高速公路、高层建筑、电线等危险环境。
-
使用本产品时,请远离手机基站,大功率发射设备等高电磁干扰的环境。
-
使用本产品时,请远离各种交通道路。
-
请勿在下雨、雷电、沙尘、雾气、下雪、大风、低温等恶劣环境使用本产品。
-
在高于 3000 米海拔以上时,环境因素会导致小车性能下降,请谨慎使用本产品。
-
当有围观人群靠近时,请小心操控,尽快离开该场所,避免发生意外。
-
请勿在儿童嬉戏的场所附近操作本产品。
-
请勿使用本产品追逐交通工具或影响交通工具的正常运行。
-
非极其必要情况,请勿当本产品在前行时关闭电机。
-
本产品不可在饮酒、疲劳、服用药物、身体不适等情况下使用。
-
请在每次使用前对本产品进行检查,包括但不限于零部件的牢固度、车体和轮胎的裂痕和磨损、电池电量、指示灯的有效性等。当发现异常时,请立即停止使用并更换相应配件。
-
工作状态异常的小车可能会发生意外,切勿启动动力系统或勉强前行。
-
请勿尝试阻止本产品工作中的任何运动部件。
-
请勿改装本产品,或将本产品用于非原设计用途。
-
本产品有负重上限,请勿大负载驾驶。
-
请使用原厂配件进行维护和替换。
-
转借给其他人员操作,请确保操作人员理解和遵守本安全须知。
-
请访问www.amovlab.com获取最新的免责声明和安全须知。