仿真
仿真系统介绍
-
R300仿真系统基于ROS以及Gazebo仿真系统搭建,提供无人车车体模型,并提供二维激光雷达、三维激光雷达以及深度相机等传感器仿真,目前配备有navigation导航功能,RtabMap三维建图功能,OctoMap三维建图功能,SLAM建图功能的仿真。
提示:
R300仿真对CPU配置有一定的要求,较早的CPU例如i3、部分i5可能存在卡的情况。不建议在R300的板载计算机上进行仿真操作。
仿真环境搭建
-
打开终端,输入以下命令,安装仿真环境
sudo apt install ros-melodic-gmapping ros-melodic-navigation ros-melodic-amcl ros-melodic-map-server ros-melodic-move-base ros-melodic-rtabmap ros-melodic-octomap -y
SLAM
Gmapping
-
打开终端,输入命令
roscd r300_simulation/sh bash r300_simulation_slam_gmapping.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。
-
然后在第三个终端界面,通过键盘控制R300的移动,进行建图。如下图所示:
-
建图完成以后,打开一个新的终端,输入命令
rosrun map_server map_saver -f ~/sim_map提示:
如果您提前启动了roscore,那么第一个终端将会报错,属正常情况。-f参数后面表示地图保存的地址和文件名称,为绝对路径。上面这个指令,将地图保存在 根目录下,并且命名为map。
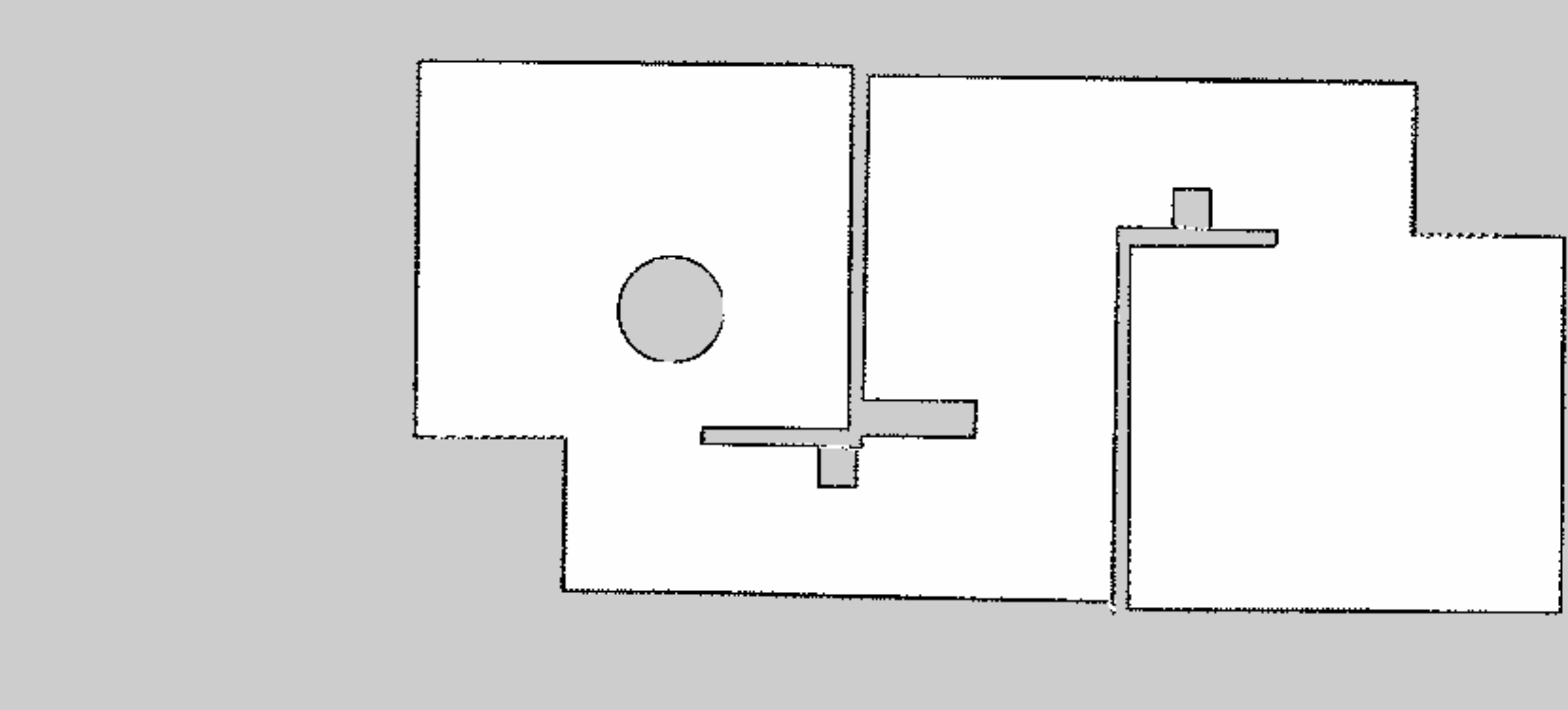
-
下图为构建好的仿真地图
Cartographer
-
打开终端,输入命令
roscd r300_simulation/sh bash r300_simulation_slam_cartographer.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。
-
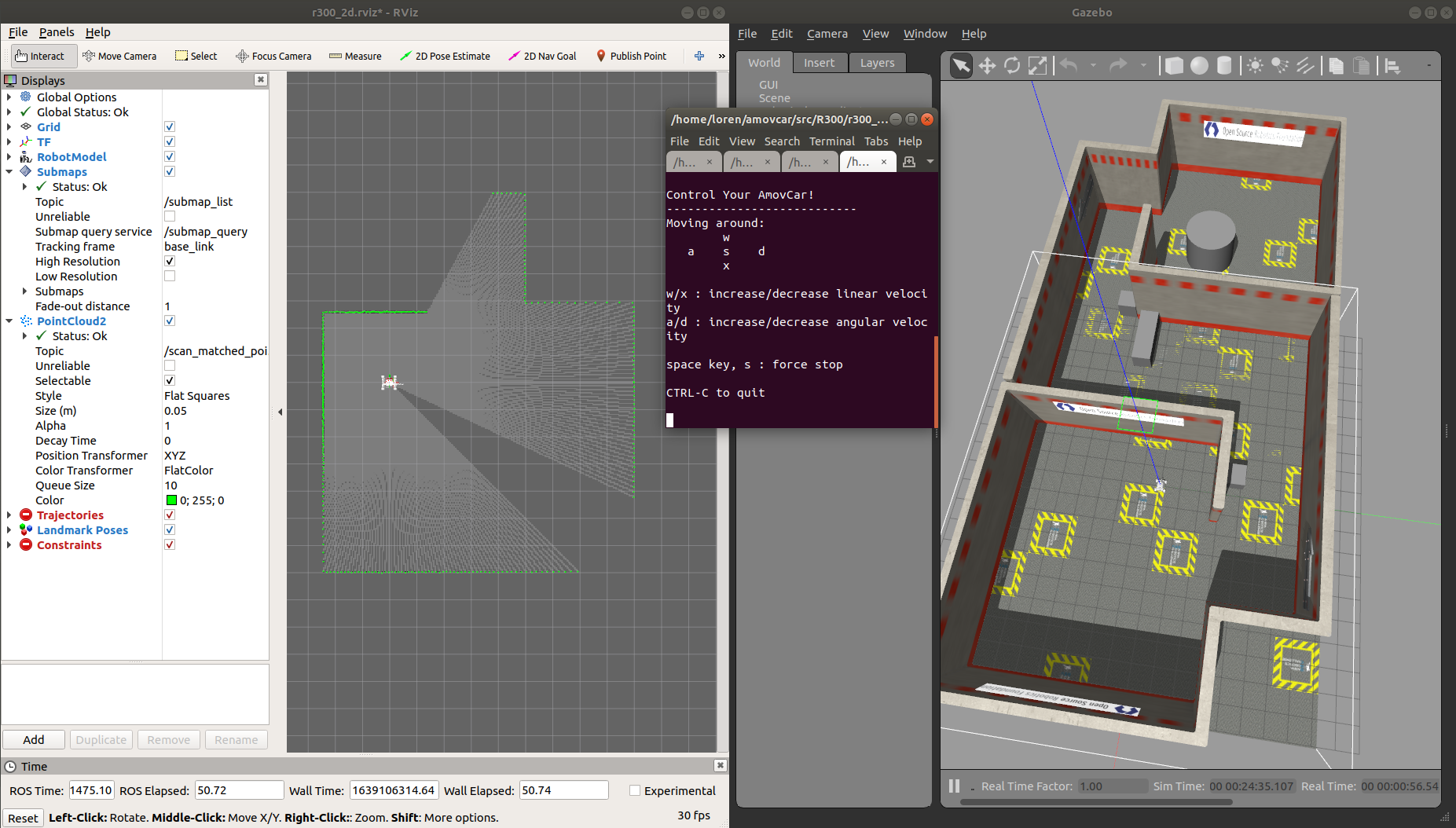
然后在最后一个终端界面,通过键盘控制R300的移动,进行建图。如下图所示
-
建图完成以后,打开一个新的终端,输入命令
roscd r300_simulation/sh bash r300_cartographer_map_save.sh提示:
该脚本将地图默认保存在/home/amov/amovcar/src/R300/r300_simulation/maps/下。地图的默认名称为sim_map使用脚本保存地图会覆盖上一次的地图文件。如果需要多次仿真建图对比,将每次保存的地图单独放在一个文件夹中。
如果您想将地图保存在其他位置,打开脚本,修改文件路径即可。
如果您提前启动了
roscore,那么第一个终端将会报错,属正常情况。下图为构建好的仿真地图:
Navigation
-
打开终端,输入命令
roscd r300_simulation/sh bash r300_simulation_navigation.sh -
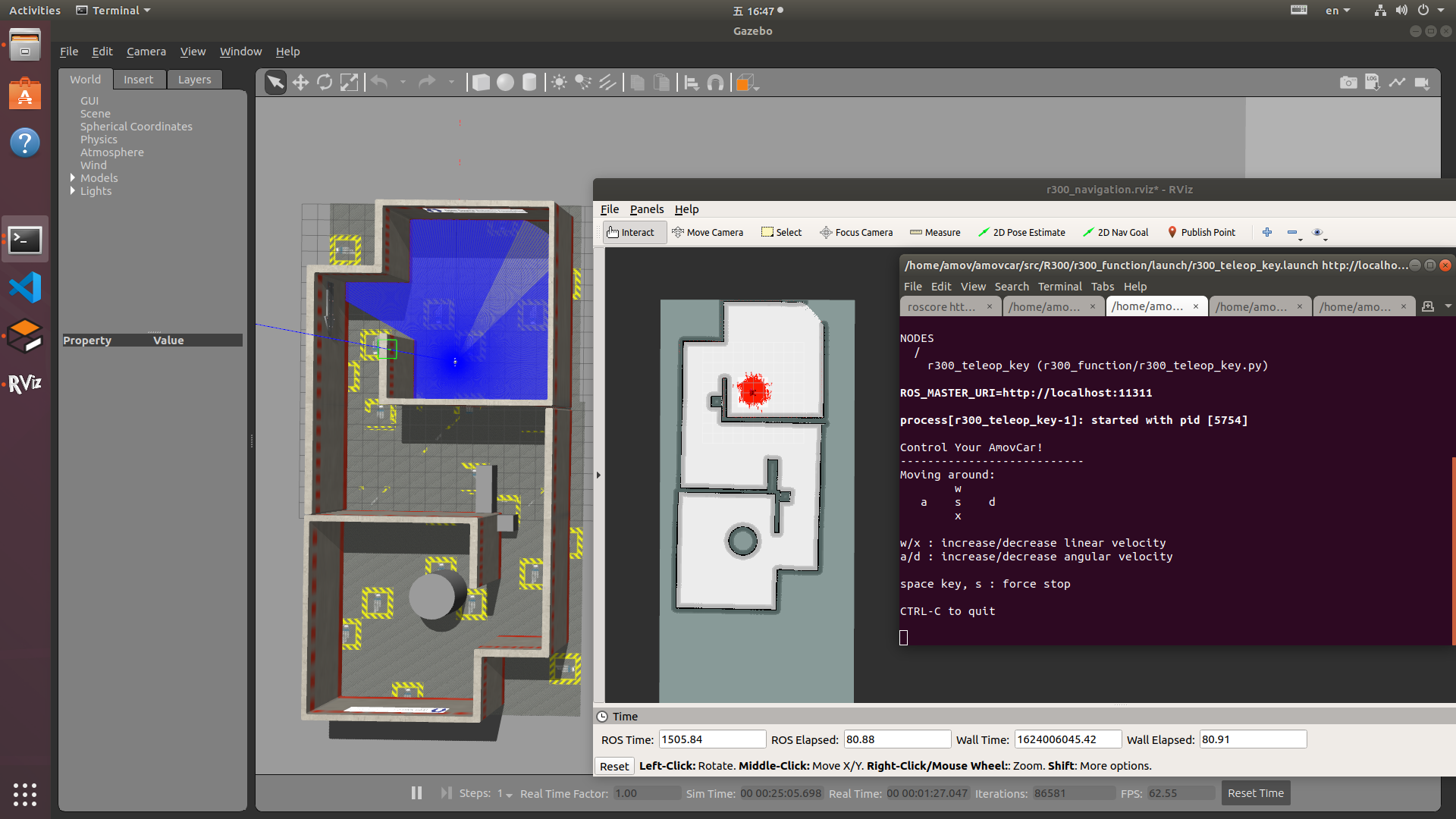
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。如下图所示:
-
确认终端均没有报错,在第三个终端内,用键盘控制小车稍微移动。待R300周围粒子收敛以后,按下 ctrl+ c,关闭该终端。
-
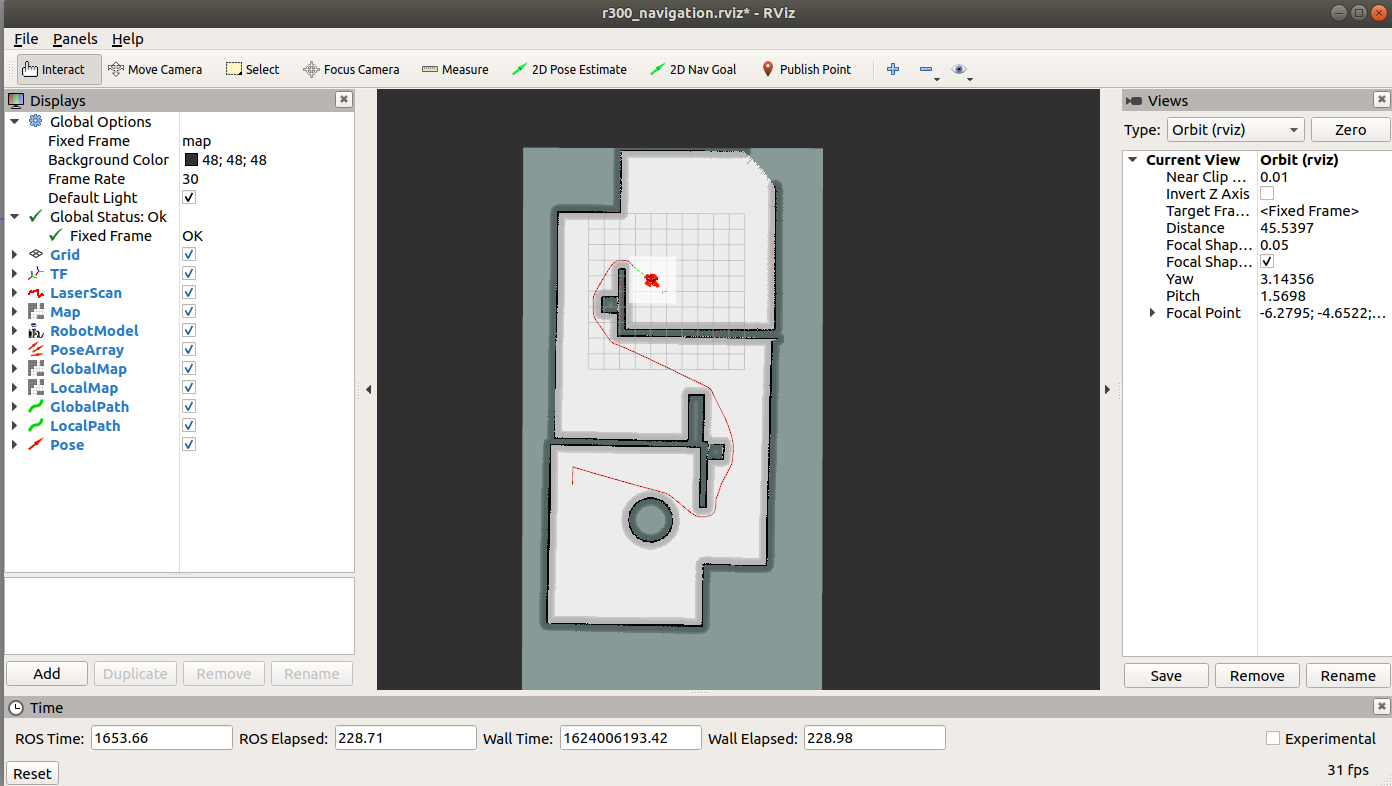
在启动的 rviz 界面顶部的菜单栏中,选择 Navigation Goal,单击地图以设置机器人的目的地,然后将绿色箭头指向机器人在目标点将要面对的方向。
-
R300开始导航如下所示:
RtabMap三维建图
-
打开终端,输入命令
roscd r300_simulation/sh bash r300_simulation_rtabmap.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。
-
确认终端均没有报错,在第三个终端内,用键盘控制小车移动进行建图。
-
建图完成以后,输入命令
rtabmap-databaseViewer ~/.ros/rtabmap.db保存地图
-
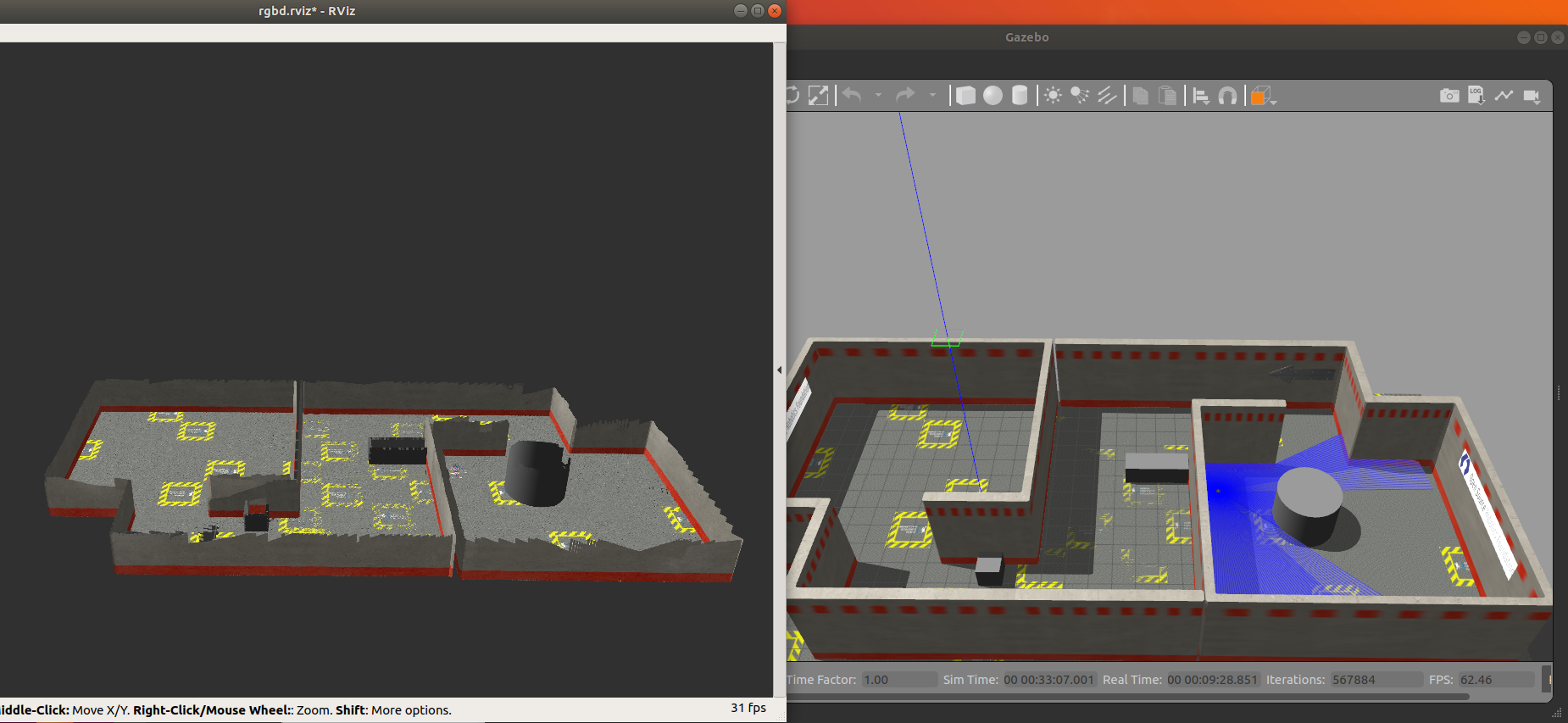
仿真rtabmap如下:
提示:
查看地图的命令为rtabmap-databaseViewer ~/.ros/rtabmap.db输入查看地图命令后会跳出一个对话框,点击菜单栏上的view—occupancy grid>即可查看地图
地图保存的路径为 ~/.ros/rtabmap.db
OctoMap三维建图
-
打开终端,输入命令
roscd r300_simulation/sh bash r300_simulation_octomap.sh -
依次检查弹出的终端窗口,检查每个终端中的节点是否正常启动。
-
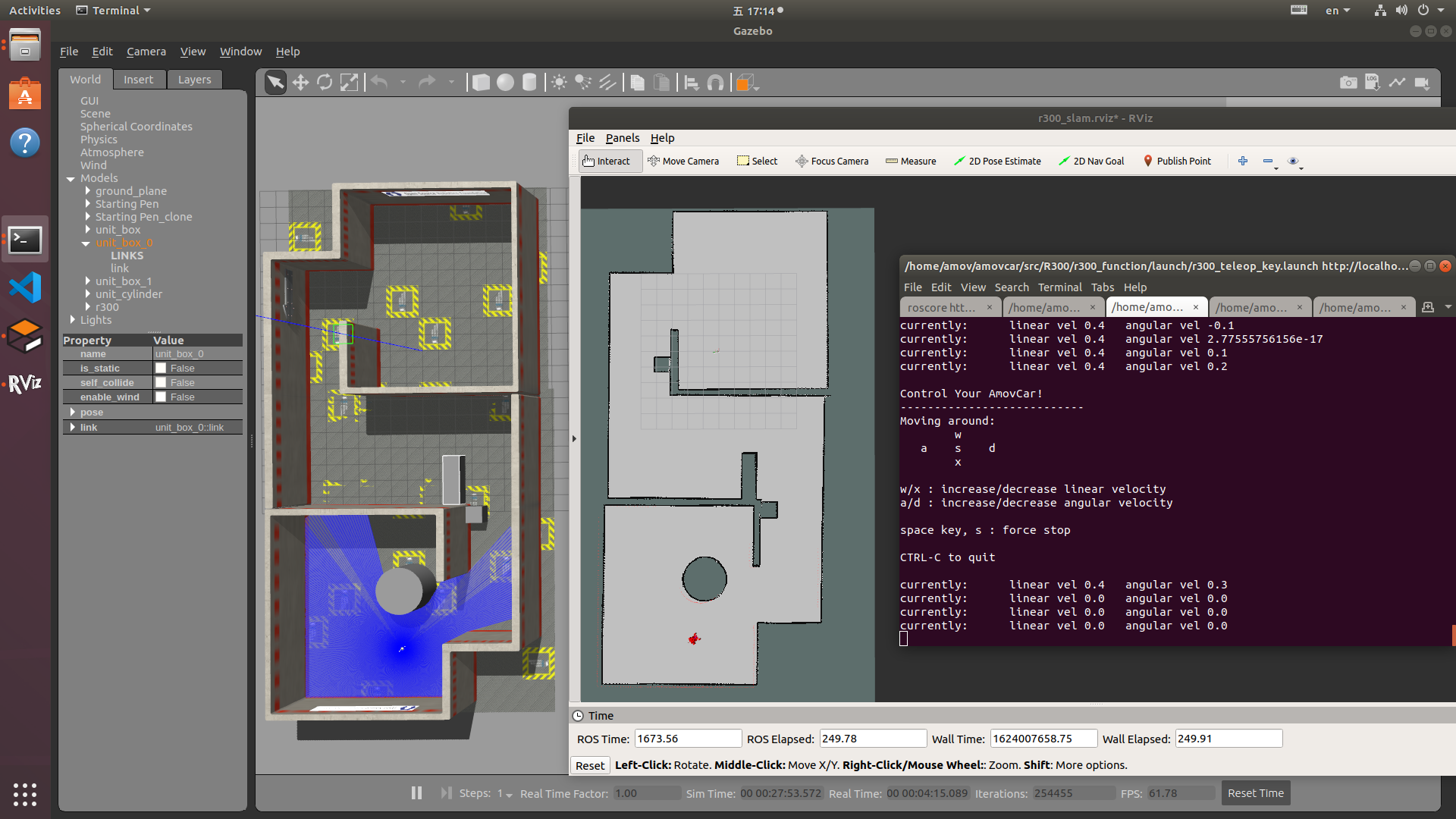
确认终端均没有报错,在第三个终端内,用键盘控制小车移动进行建图。如下图所示:
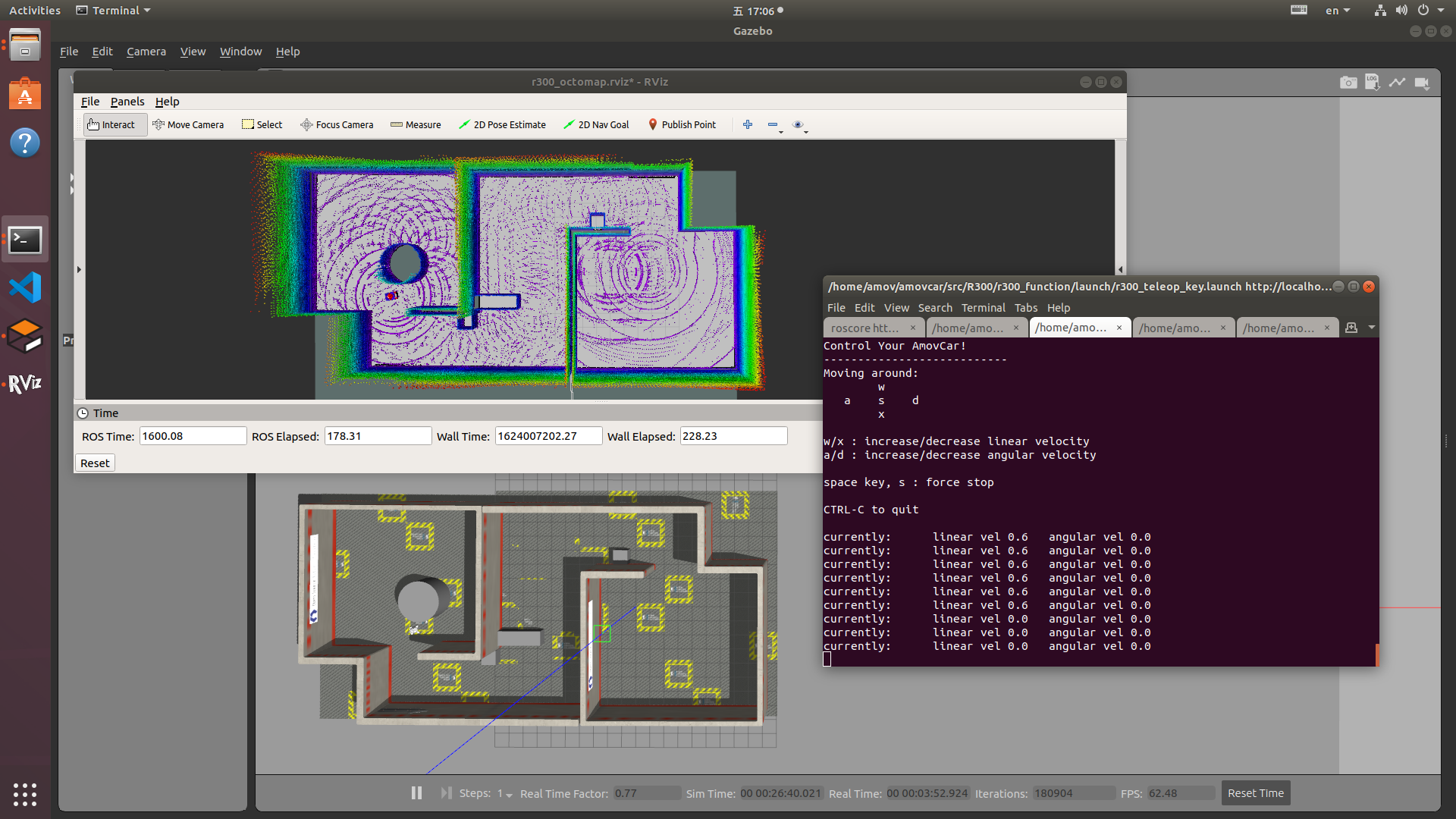
-
建图完成以后,输入命令
rosrun octomap_server octomap_saver -f ~/map_name.ot保存地图。
提示:
-f参数后面表示地图保存的地址和文件名称,为绝对路径。上面这个指令,将地图保存在根目录下,并且命名为map_name.ot。生成地图文件会耗费一定时间,示例中地图文件生成耗费时间大概在5秒左右。
-
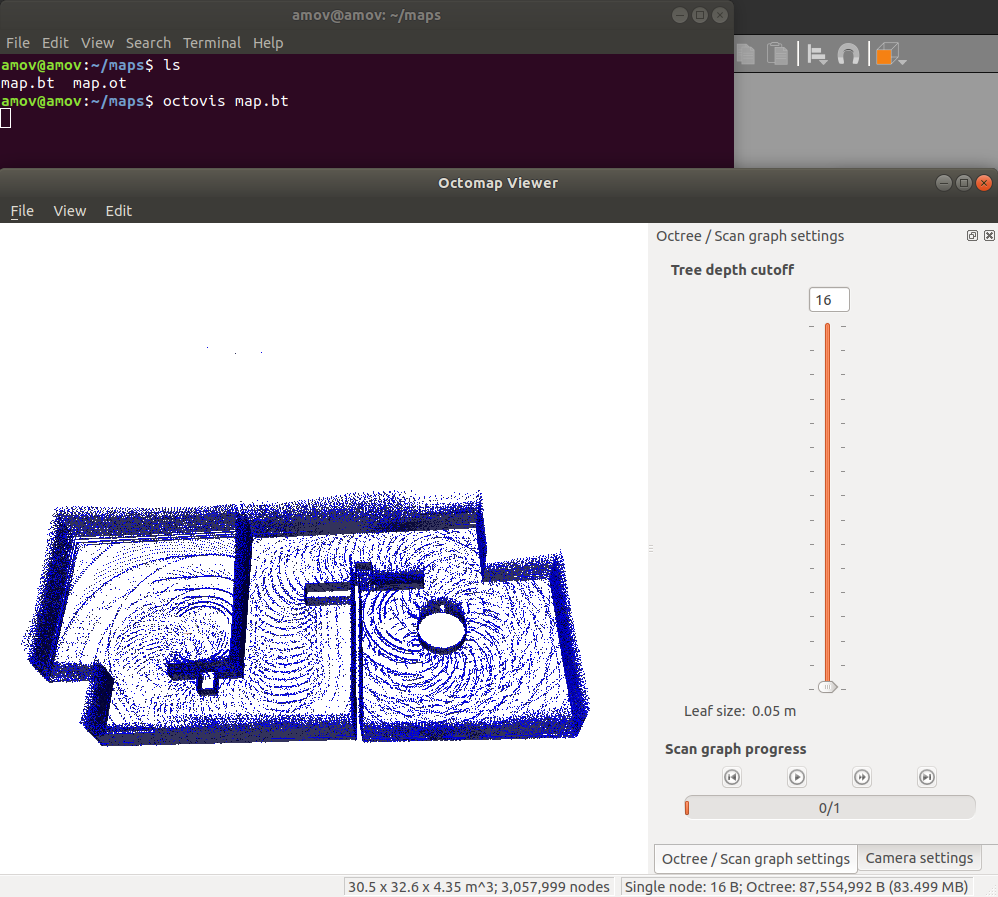
输入命令
octovis map_name.ot查看三维地图。
提示:
需在保存地图的文件夹路径下输入命令查看oct地图需要安装相关功能包
sudo apt install octovis -
仿真Octomap地图如下: