航线规划说明
以下是以QGC 3.5.6版本地面站进行的航线规划说明
一、布置航点
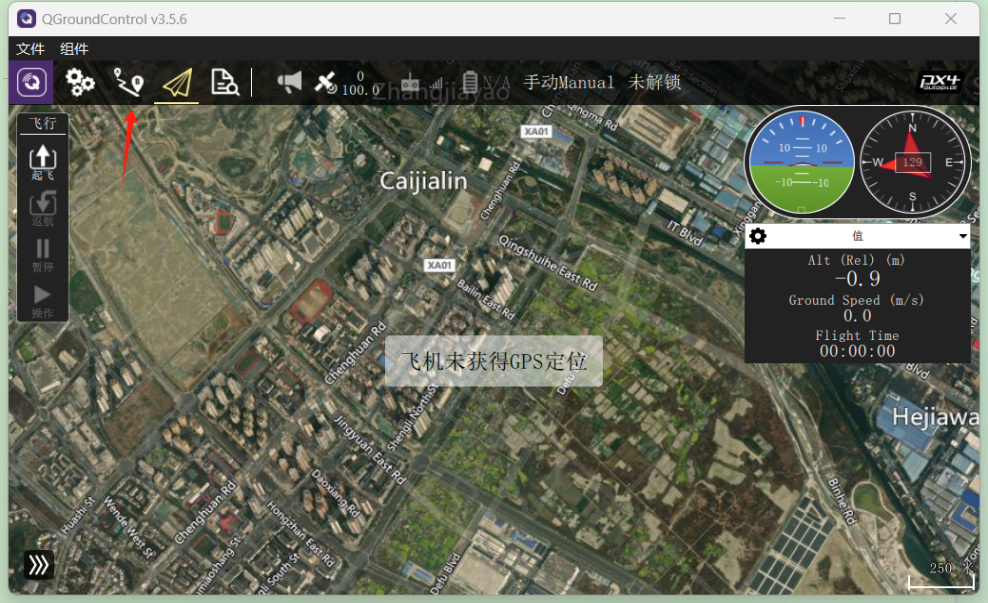
1、打开qgc,选择A-B图标,点击。
2、点击文件,点击清除飞机任务,清除历史飞机任务。
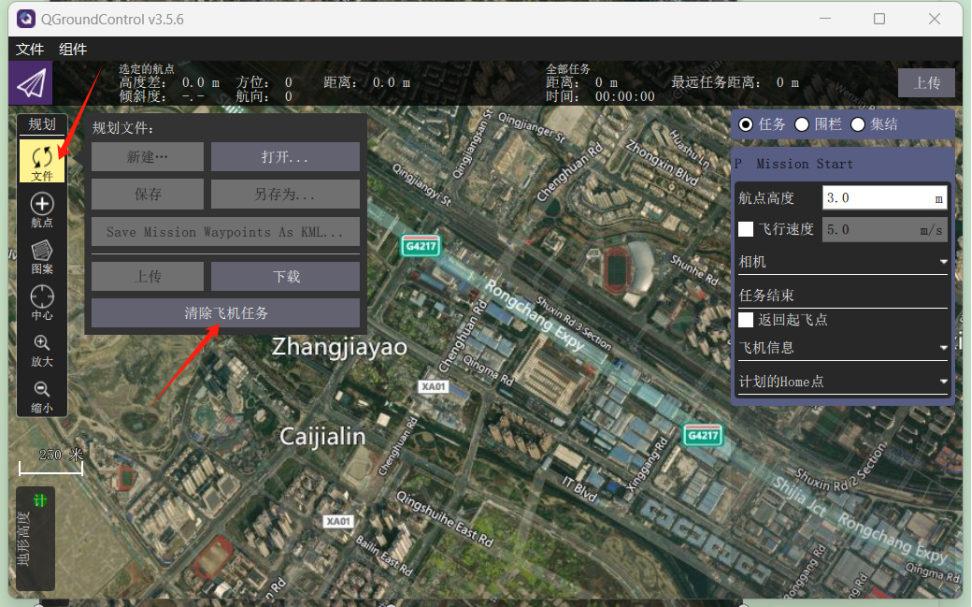
点击右上角“是”,清除飞机任务。
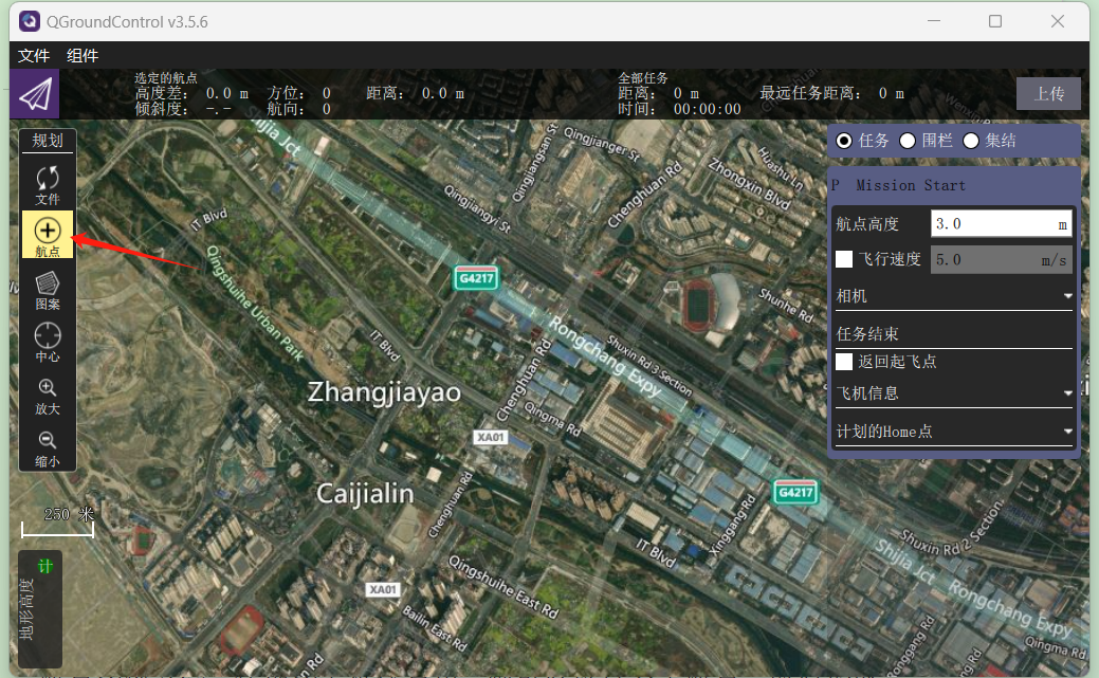
3、点击航点,设置航线。
航点图标变亮,在地图上依次点击,则可以设置多个航点,最后形成期望的航线。点击标记的航点,当航点从黄色变为绿色,则可以调整该航点的位置。如下图所示:
注意
下图是我为了清楚介绍航线规划所随意设置的航线,在实际操作时,请注意航线任务的距离,保证安全。

二、设置高度、速度、悬停时间等参数
1、在Mission Start 中设置航点高度和飞行速度对所有的任务点有效。选中“返回起飞点”无人机在飞行完航线任务后会自动返回起飞点降落。

2、在每个任务点里面也可以设置高度和速度等值,这里的设置只对该任务点有效,在每个任务点的右侧有一个三道杠的图标,可以点击该图标设置该任务点的更多信息,如删除航点等命令 “Hold”为飞机在当前航点悬停多少秒。

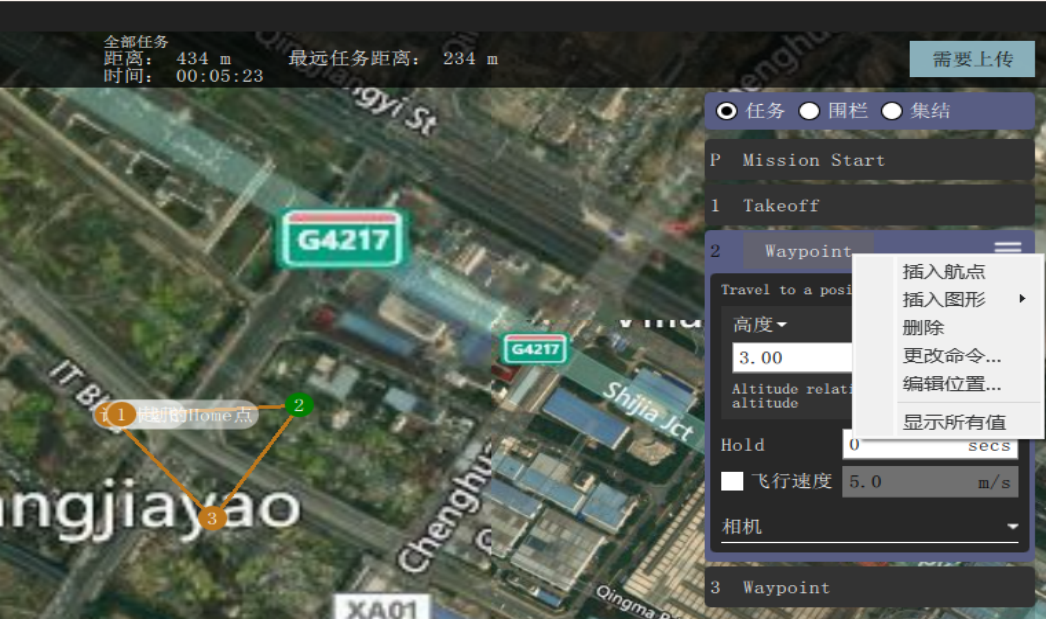
3、点击每个航点中Waypoint可以设置航点的类型,默认是Basic类别,下面有Waypoint(航点)、Return To Launch(返回起飞点)、Land(降落)、Takeoff(起飞)四种,分别对应到达该航点后执行的动作。

4、如下图所示,我这里将第一个点设置为起飞点、第二和第三个点设置为航点,并且选中“返回起飞点”,这样的话无人机会起飞并先飞到第二个点,再飞到第三个点,在到达第三个点后返航到起飞点。 最后必须点击“需要上传”,才能保存进飞控。 任何修改,都需要点击“需要上传”,保存参数。

5、点击小飞机图标进入地图界面, 滑动后无人机进行飞行任务。
