遥控器校准与飞行模式设置
遥控器介绍与校准
遥控器介绍
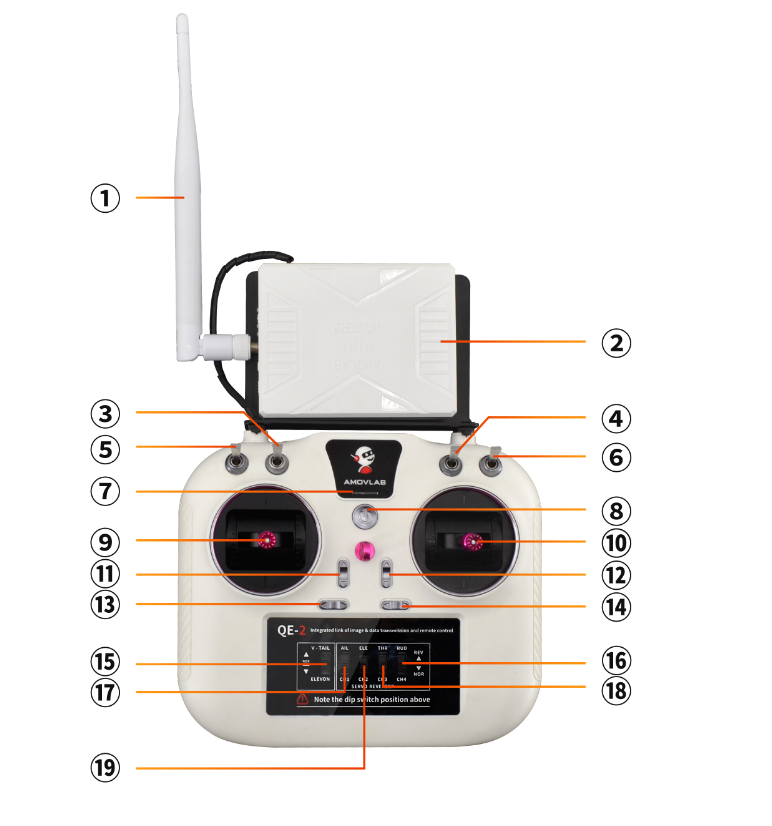
① 图数传天线
② 图数传基站端
③ 6通道
④ 7通道
⑤ 5通道
⑥ 8通道
⑦ 开关指示
⑧ 电源开关
⑨ 摇杆
⑩ 摇杆
⑪ 微调1
⑫ 微调3
⑬ 微调2
⑭ 微调4
⑮ 混控开关
⑯ 方向正反
⑰ 副翼正反
⑱ 油门正反
⑲ 升降正反
遥控器使用注意事项:
天线:为保证发射机的信号质量和强度,使用前请把天线斜角向上打开,使用过程中请勿手握天线。
混控:共三个挡位设置,上方设置三角翼混控模式,中间设为无混控模式,下方设置为固定翼混控模式
微调①:左手油门为油门微调,右手油门为升降舵微调
微调②:方向舵微调
微调③:左手油门为升降舵微调,右手油门为油门微调
微调④:副翼微调
注意
微调键按一下是1个微秒变化,长按是4个微秒变化。当发射机发出“哔哔”报禁声和指示灯闪烁的时候,表示发射机电量不足。
遥控器校准步骤
用数据线连接无人机与笔记本,打开QGC地面站到遥控器校准页面,遥控器校准步骤如下图,进入遥控器界面,选择遥控器摇杆模式,最后点击校准,按照提示拨动摇杆即可。
注意
摇杆模式的选择要与遥控器一致!
飞行模式与开关设置
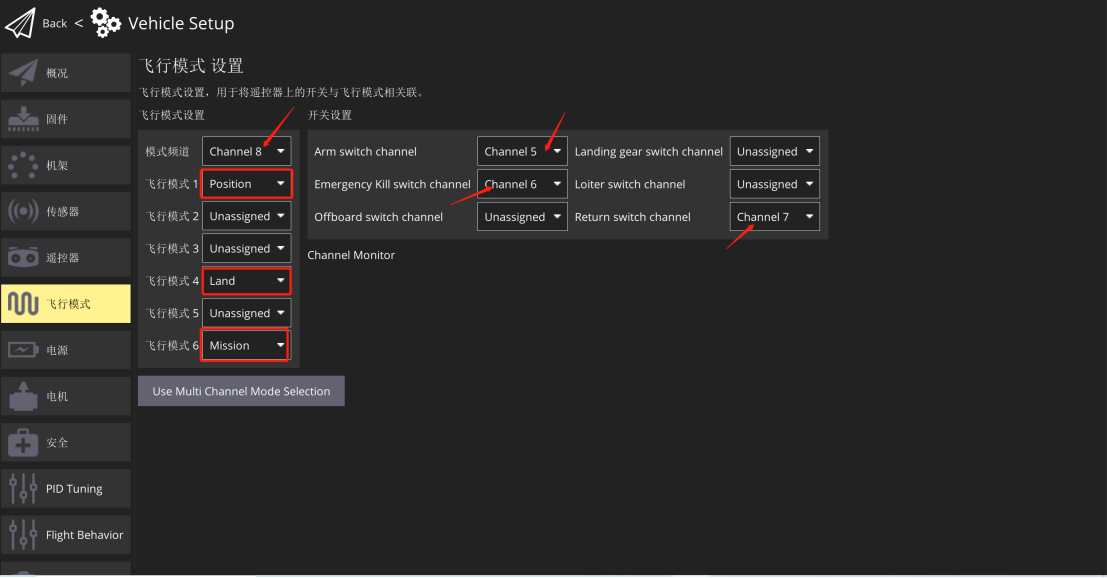
本产品在发货前已设置好飞行模式与遥控器开关设置。
遥控器默认飞行模式设置,5通道设置为解锁开关,6通道设置为急停模式,7通道设置为返航模式,8通道上中下三个挡位分别对应定点模式,降落模式,任务模式。
对于通道8,上部挡位对应飞行模式1,中间挡位对应飞行模式4,下部挡位对应飞行模式6。
飞行模式介绍
(一)定点模式
定点模式是一种容易于飞行的遥控模式,在该模式中,横滚杆和俯仰杆控制无人机左右和前后方向的运动,油门控制上升-下降的速度。当摇杆居中时,无人机将保持不动,在该位置稳定悬停。
(二)定高模式
定高模式是一个相对容易飞的遥控模式,滚转和俯仰杆控制飞机在左右和前后方向上的运动,偏航杆控制水平面上的旋转速度,油门控制上升 -下降的速度。 当杆被释放/回中时,飞机将恢复水平并保持当前的高度。如果刮风,飞机会向风的方向漂移。
(三)自稳模式 自稳模式是一种难度较高的飞行模式,在手动控制下,横滚和俯仰摇杆控制无人机左右和前后方向的倾转角度,偏航摇杆控制水平面上方的旋转速率,油门控制高度。飞行器将向任何风的方向漂移,你必须控制油门以保持高度。
(四)起飞模式
起飞模式无需遥控器控制,无人机会自动在当前位置起飞,起飞到设定高度保存悬停。
(五)降落模式
降落模式无需遥控器控制,无人机会自动在当前位置进行降落,降落后自动上锁。
(六)任务模式
任务模式是无人机执行已经上传到飞行控制器的飞行计划,按照指定的航线进行自主飞行。
(七)返航模式
返航模式是一种自动飞行模式,无人机会在当前位置进行返航,回到起飞点悬停或者降落。
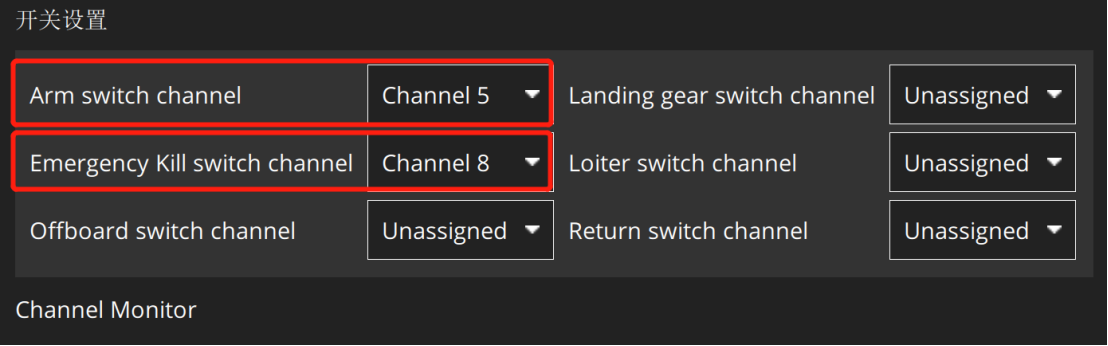
开关设置介绍
该产品遥控器5通道设置为解锁开关,6通道设置为急停开关。
该产品解锁方式不同于以往的摇杆“内八”解锁,采用遥控器开关控制解锁,在定点模式时,实现一键解锁与上锁,在自稳模式时需将油门摇杆控制在最低位进行解锁。
急停开关:
该开关一般不建议使用,除非当无人机在较低高度失控或者发生炸机后电机无法立刻停止转动,通过使用该开关对无人机实现“一键锁桨”,在保护人身安全的同时将损失降到最低。