GPS与RTK原理以及工作方式
一.GPS概述
1.定义:
全球定位系统GPS(Global Position System),全称为NAVSTAR GPS(NAVigation Satellite Timing And Ranging Global Position System,导航星测时与测距全球定位系统)。
GPS是一个由美国国防部开发的空基全天候导航系统,它用以满足军方在地面或近地空间内获取在一个通用参照系中的位置、速度和时间信息的要求。 是一种可以授时和测距的空间交会定点的导航系统,可向全球用户提供连续、实时、高精度的三维位置,三维速度和时间信息。

2.GPS系统的组成
GPS空间部分:
主要由24颗GPS卫星构成,其中21颗工作卫星,3颗在轨备用卫星。24颗卫星均匀分布在6个轨道平面内,轨道倾角55°,各个轨道平面之间相距60度,即轨道的升交点齿经各相差60度。每个轨道平面内各颗卫星之间的升交角距相差90度,一轨道平面上的卫星比西边相邻轨道平面上的相应卫星超前30度。
地面监控系统:
精确观测:由于无人机的特殊性能,可以在更高密度和更广阔的范围内收集数据,例如监控城市交通、森林和农田状况等。
实时监控:无人机地面监控系统可以实时监控目标区域,这在需要及时响应的紧急事件中非常重要。
增强部署灵活性:无人机地面监控系统可以很容易地到达困难的或危险的场所进行观测,不仅可以避免人身伤害,而且可以达到更好的监控效果。
提高安全性:无人机地面监控系统在公安、消防、环保等相关部门中使用非常广泛,可以实现更精准和更有效的安全监测。
总的来说,在多个领域中实现无人机地面监控系统的应用,可以更好地提升监测水平和治理效率,并为人们提供更加准确和及时的服务。
3.定位原理
①绝对定位原理 无人机上的 GPS 绝对定位是通过接收来自卫星的信号,然后使用三角测量原理来 计算其精确位置的技术。当无人机在飞行中时,GPS 接收器会接收来自不同卫星的信号,并利用这些信息来确定无人机的经度、纬度和海拔高度等位置信息。
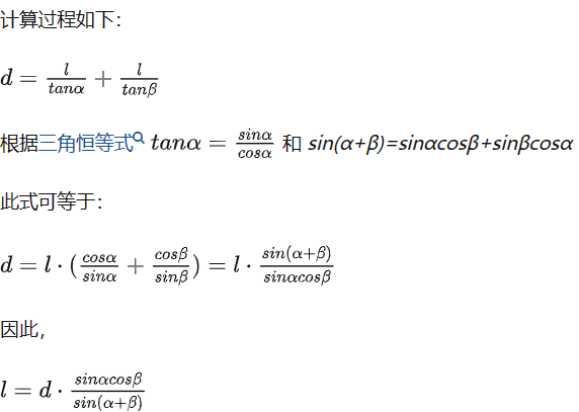
三角测量原理:三角定位原理系假设一量测目标点及两个已知座标的参考点可形成一个三角形,则借由计算三角形其中参考边的长度,量测两参考点与目标点形成的角度°,即可找出目标点的距离及座标。

②相对定位原理
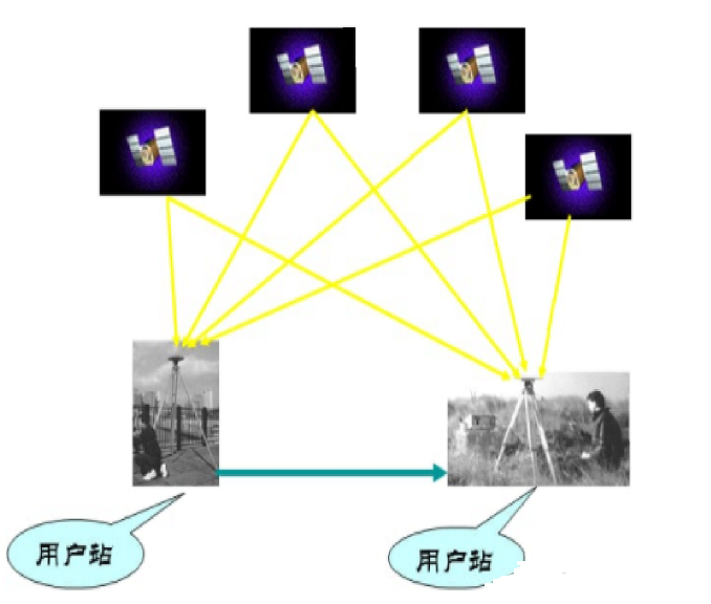
GPS相对定位是通过接收来自不同卫星的信号,并利用这些信号之间的时间差来计算位置的一种定位方式。将两台接收机分别安置在基线的两个端点,其位置静止不动,并同步观测相同的4颗以上GPS卫星,确定基线两个端点在协议地球坐标系中的相对位置,这种定位模式称为相对定位。
③静态相对定位
将几台GPS接收机安置在基线端点上,保持固定不动,同步观测4颗以上卫星。可观测数个时段,每时段观测十几分钟至1小时左右。最后将观测数据输入计算机,经软件解算得各点坐标。
④动态相对定位 先建立一个基准站,并在其上安置接收机连续观测可见卫星,另一台接收机在第1点静止观测数分钟后,在其他点依次观测数秒。最后将观测数据输入计算机,经软件解算得各点坐标。动态相对定位的作业范围一般不能超过15km。
二.RTK
1.概述
RTK(Real-Time Kinematic)是一种高精度的全球定位系统(GNSS)技术,用于提供厘米级甚至毫米级的位置测量精度。RTK技术通过基站和移动设备之间的实时数据传输,实现了对移动设备位置的快速、高精度的校准,可应用于地理测绘、农业、建筑和机器自主导航等领域。
2.原理
①RTK技术的实现依赖于两个关键要素:基站和移动设备。RTK技术主要通过测量移动设备接收到的卫星信号与已知位置的基站接收到的同一信号之间的相位差,进而实现高精度的位置测量。
RTK技术的关键在于基站和移动设备之间的差分定位。基站通过接收卫星信号并记录其位置,然后将这些数据发送给移动设备。移动设备接收来自基站的数据,并利用这些信息与自身接收到的卫星信号进行比对和校准。通过计算两者之间的相位差,RTK技术能够实现厘米级甚至毫米级的高精度定位。
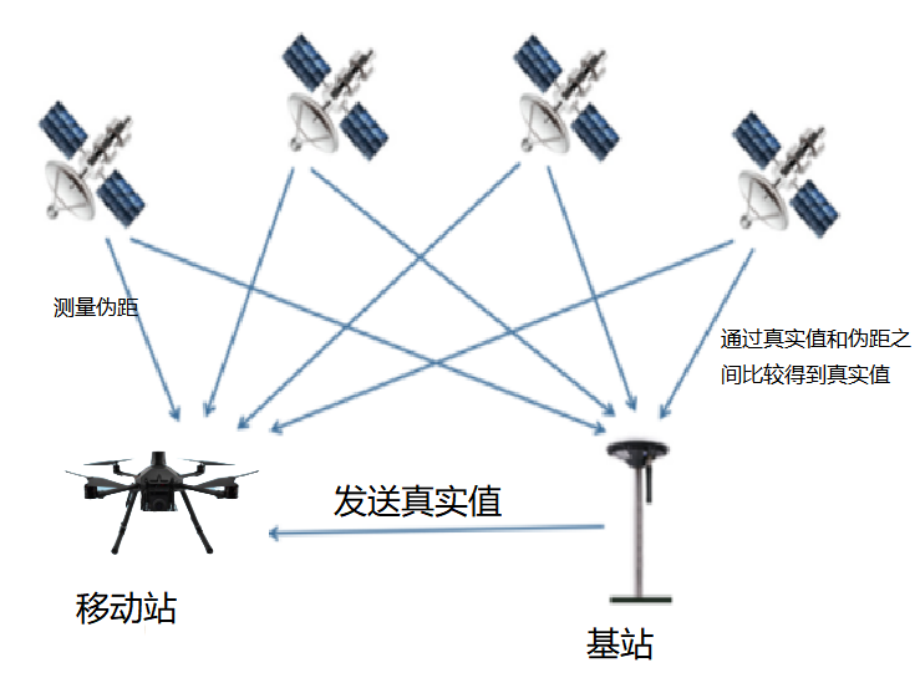
差分定位:通过比较一个已知位置(参考站)的接收机所测得的卫星信号和另一个接收机所测得的相同卫星信号,从而实现对后者位置的更精确测量。在差分定位中,参考站接收到卫星信号后计算其精确位置,并将这些数据传输给移动设备或用户。移动设备或用户的接收机利用参考站提供的信息和自身接收到的卫星信号进行比对和校准,从而获得更精确的位置信息。 差分定位可以分为实时差分定位和后处理差分定位两种方式。实时差分定位能够实时提供高精度的位置信息,通常应用于需要即时反馈的领域;后处理差分定位则是在数据采集完成后,利用参考站和移动设备的记录数据进行离线处理,得到更精确的位置信息。
②RTK系统的基准站:
组成:基准站GPS接收机及卫星接收天线、无线电数据链电台及发射天线、直流电源
作用:求出GPS实时相位差分改正值,然后将改正值通过数传电台及时传递给流动站精化其GPS观测值,从而得到更为精确的实时位置。
③RTK系统的移动站:
组成:RTK系统的移动站通常由GNSS接收机、通信模块、天线和电源供应等组成部分构成
作用:包括实时定位精度提升,快速定位反馈。
④GPS实时差分定位RTK技术的缺点:
成本高昂:RTK技术需要基站和移动设备之间进行实时数据传输,这可能需要额外的通信设备和服务,因此成本较高。
对环境敏感:由于RTK技术对卫星信号的质量和稳定性要求较高,因此在恶劣的天气或环境条件下,如高楼林立的城市地区或密集的树林中,可能会影响信号接收和精度。
依赖基站:RTK技术需要与基站进行实时通信和数据传输,因此在基站覆盖范围之外,无法获得实时的差分数据,导致定位精度降低。
复杂性:RTK技术需要专业的设备和技术人员来支持和维护,因此在应用过程中可能需要一定的专业知识和经验。
多路径效应:在某些环境下,卫星信号可能会出现反射、折射等多路径效应,对RTK技术的测量结果产生影响。