APM基础
APM简介
-
ArduPilot的“Ardu”部分取自Arduino。最初APM1自动导航板是基于Arduino开发环境的。到现在就不再使用Arduino运行库了。尽管仍然使用稍加修改的Arduino集成开发环境版本,来支持用于基于AVR的APM1与APM2板的ArduPilot。因为现在不仅支持Arduino兼容硬件(如PX4),为表示当前代码的跨平台特性,把“Ardu”前缀从软件项目取消,改为了“APM” 前缀。
由于APM良好的可定制性,通过开源软件Mission Planner,开发者可以配置APM的设置,接受并显示传感器的数据。目前APM飞控已经成为开源飞控成熟的标杆,可支持多旋翼、固定翼、直升机和无人驾驶车等无人设备。针对多旋翼,APM飞控支持各种四、六、八轴产品,并且连接外置GPS传感器以后能够增稳,并完成自主起降、自主航线飞行、回家、定高、定点等丰富的飞行模式。APM能够连接外置的超声波传感器和光流传感器,在室内实现定高和定点飞行。
Mission Planner地面站
-
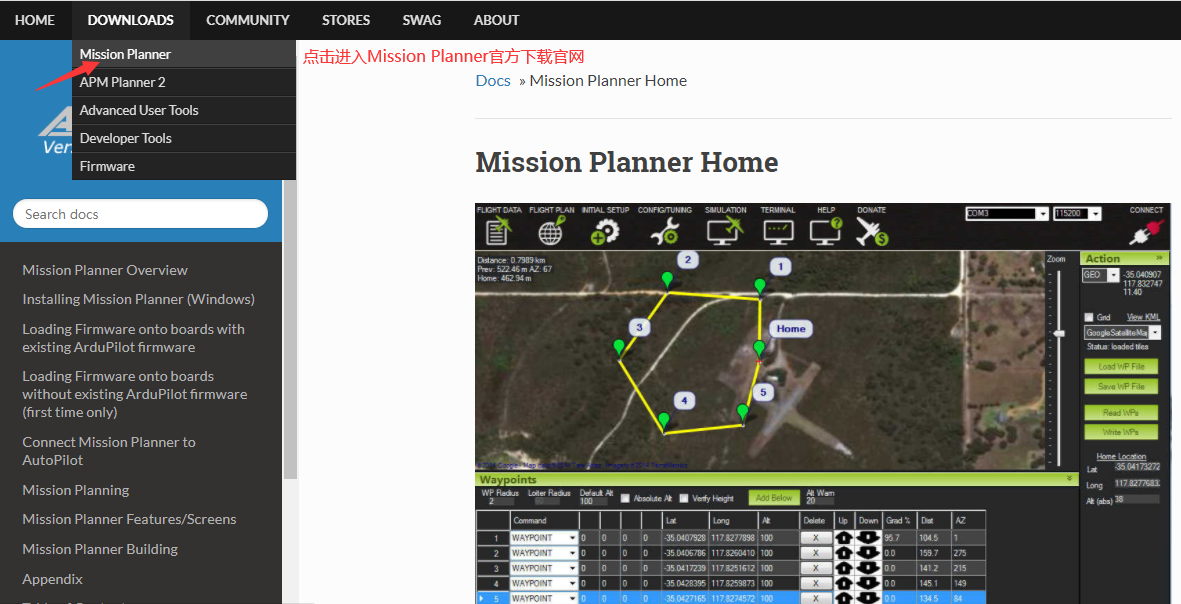
Mission Planner是一款免费开源、比较成熟稳定的地面站,只有Windows版本。
打开官网,找到“MissionPlanner”选项;
根据自己需要选择相应的安装包;
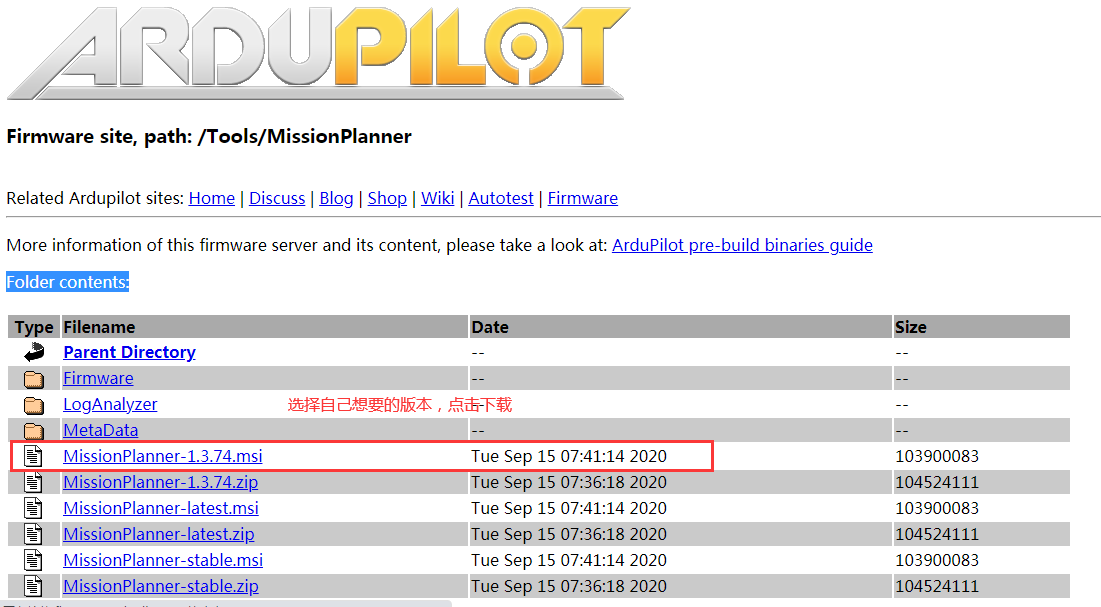
双击下载的.msi文件以运行安装程序;
根据个人情况安装路径,默认的情况下是C盘,自定义完成以后再点击“下一步”;
当安装程序安装一半时会出现“设备驱动程序安装向导”界面。这里需要安装,点击“设备驱动程序安装向导”界面的“下一步”;
当“设备驱动程序安装向导”安装完成以后,检查“设备驱动程序安装向导”界面里的“驱动程序名”是否全部安装正确。然后点击“完成”,此时Mission Planner地面站安装成功。
地面站连接到飞控
-
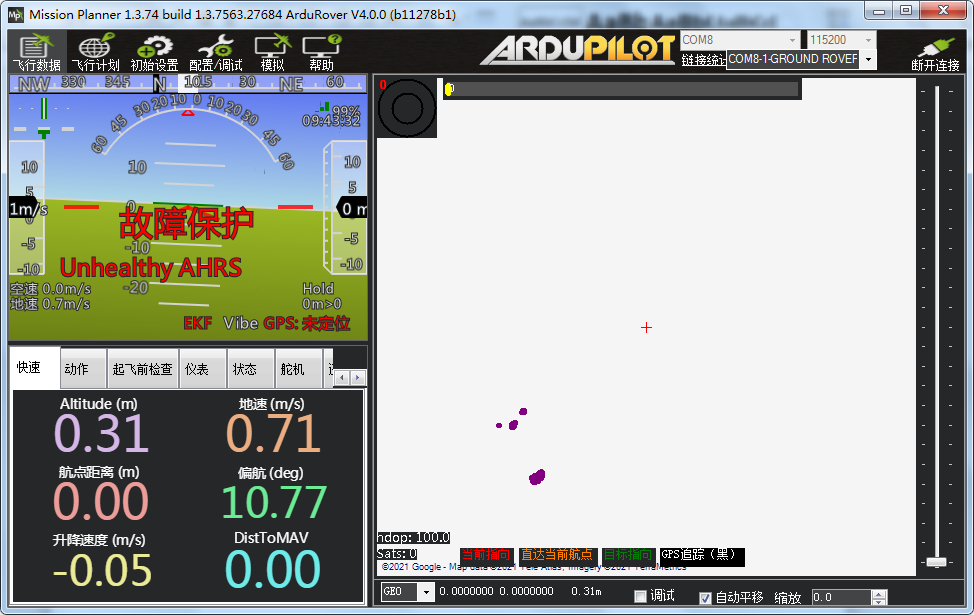
要建立连接,您必须首先选择要使用的通信方法/通道,然后设置物理硬件和Windows设备驱动程序。使用USB线连接飞控的USB口。

注意!
Windows上必须存在用于连接硬件的驱动程序,因为这会使您的连接的COM端口和默认数据速率可供Mission Planner使用。在Mission Planner上,使用屏幕右上方的下拉框设置端口和波特率。
提示:
连接USB后,系统会自动为飞控分配一个COM端口号,该端口号将显示在下拉菜单中,还需要设置用于连接的适当的波特率(通常USB连接波特率为115200,无线连接速率为波特率)。设置好端口号和波特率后点击连接,此时说明连接成功