基本飞行概念
-
PixHawk是著名飞控厂商3DR推出的新一代独立、开源、高效的飞行控制器,前身为APM飞控,不仅提供了丰富的外设模块和可靠的飞行体验,有能力的爱好者还可在其基础上进行二次开发。第一次使用需要多方查阅资料,摸索前行,根据本人学习和使用过程整理成文,其中大部分内容来自官网和相关网站的资料,希望对想尝试PixHawk的朋友有所帮助。
1.1 机头指向和方向
-
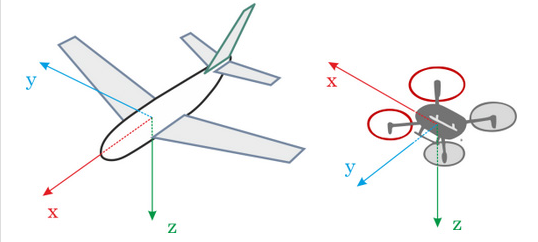
以固定翼与四轴飞行器为例,下图是无人机的载体坐标系:
- 载体重心为坐标原点
- 载体前进方向为x轴正方向
- 载体水平姿态时垂直向下为z轴正向
- 载体飞行方向指向右为y轴正向(x,y和z轴满足右手螺旋准则)
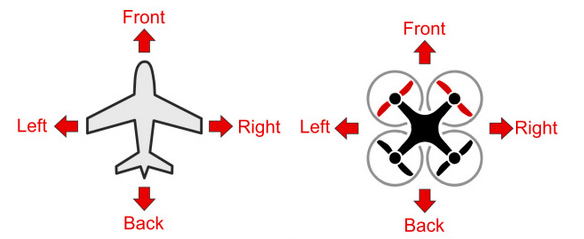
飞行方向示意图(俯视):
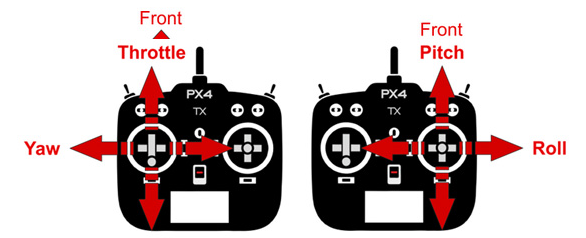
1.2 遥控与基本飞行控制
-
使用左右油门时,油门最低位置如下图:
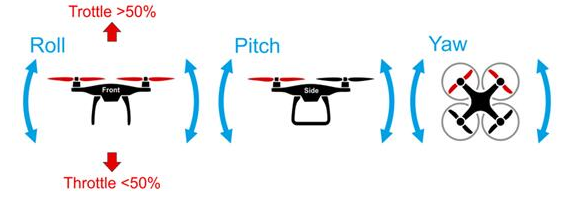
1.3多轴飞行器的飞行姿态角
-
Roll: 横滚角,以飞行前进方向为轴的左右角度变化
-
Pitch: 倾斜角,以飞行前进方向为轴的高低角度变化(抬头、低头)
-
Yaw: 航向角,飞行器机头指向角度的改变