无人机集群仿真
五机集群飞行功能demo
-
集群飞行功能介绍
提示:
该功能为控制五架无人机进行集群编队飞行,可实现模式控制、队形控制、位置控制等功能。Launch文件位置:Prometheus/Simulator/gazebo_simulator/launch_formation
启动脚本文件位置:Prometheus/Simulator/gazebo_simulator/sh_formation/sitl_formation.sh
-
操作步骤:
1.启动sitl_formation.sh脚本文件,并确保每个功能模块都成功启动;
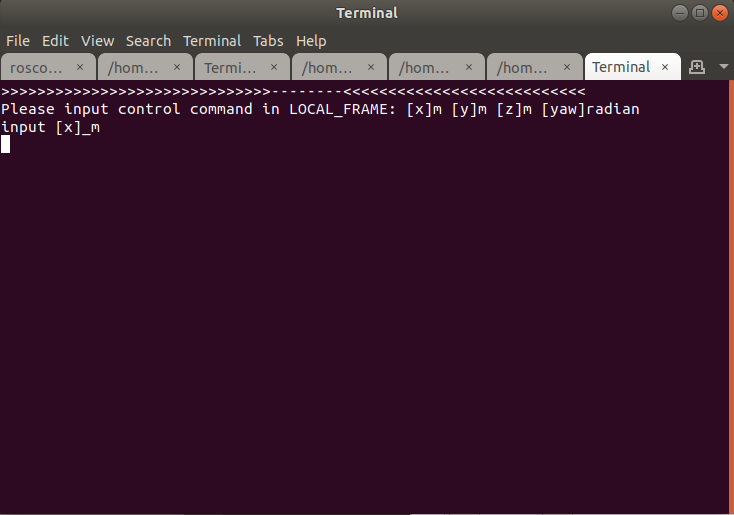
2.在位置控制节点的终端窗口中根据提示输入在本地坐标系下的目标位置X,Y,Z(单位为米)以及无人机偏航角(单位为弧度)数据;
3.在队形切换节点的终端窗口根据提示选择队形(目前仅支持以一字形或三角形起飞,不选择的情况下默认以一字形起飞);
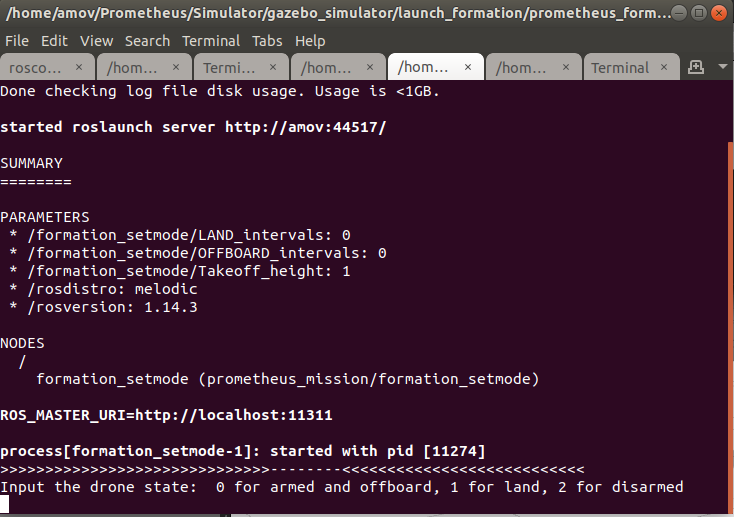
4.在模式切换节点的终端窗口根据提示输入数字0选择解锁起飞,无人机集群便飞行至目标位置;
5.用户可根据个人使用情况按照提示正确输入队形控制,模式控制,位置控制相关指令。
四机正方形绕圈功能demo
-
四机正方形绕圈功能介绍:
提示:
该功能为四架无人机组成正方形绕圈的集群飞行。Launch文件位置:Prometheus/Simulator/gazebo_simulator/launch_formation
启动脚本文件位置:Prometheus/Simulator/gazebo_simulator/sh_formation/sitl_formation_square.sh
-
操作步骤:
1.启动sitl_formation_square.sh脚本文件,并确保每个功能模块都成功启动;
2.在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常;
在正方形绕圈控制节点终端窗口根据提示输入1启动正方形绕圈功能;
无人机集群仿真
五机集群飞行功能demo
-
集群飞行功能介绍
提示:
该功能为控制五架无人机进行集群编队飞行,可实现模式控制、队形控制、位置控制等功能。Launch文件位置:Prometheus/Simulator/gazebo_simulator/launch_formation
启动脚本文件位置:Prometheus/Simulator/gazebo_simulator/sh_formation/sitl_formation.sh
-
操作步骤:
1.启动sitl_formation.sh脚本文件,并确保每个功能模块都成功启动;
2.在位置控制节点的终端窗口中根据提示输入在本地坐标系下的目标位置X,Y,Z(单位为米)以及无人机偏航角(单位为弧度)数据;
3.在队形切换节点的终端窗口根据提示选择队形(目前仅支持以一字形或三角形起飞,不选择的情况下默认以一字形起飞);
4.在模式切换节点的终端窗口根据提示输入数字0选择解锁起飞,无人机集群便飞行至目标位置;
5.用户可根据个人使用情况按照提示正确输入队形控制,模式控制,位置控制相关指令。
四机正方形绕圈功能demo
-
四机正方形绕圈功能介绍:
提示:
该功能为四架无人机组成正方形绕圈的集群飞行。Launch文件位置:Prometheus/Simulator/gazebo_simulator/launch_formation
启动脚本文件位置:Prometheus/Simulator/gazebo_simulator/sh_formation/sitl_formation_square.sh
-
操作步骤:
1.启动sitl_formation_square.sh脚本文件,并确保每个功能模块都成功启动;
2.在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常;
在正方形绕圈控制节点终端窗口根据提示输入1启动正方形绕圈功能;
MOCAP无人机集群
注意!
在使用无人机编队套件之前,需熟练掌握无人机单机操作,无人机相关Wiki链接:P230Wiki链接
光学动作捕捉系统介绍
- 光学动作捕捉系统是一把算法层面的尺子,可以实时以0.1mm的精度捕捉空间内智能体6DOF的位姿信息,更可以通过基于频闪编码的主动式标记点和惯性传感器融合技术解决目标因遮挡、拍摄越界造成的追踪丢失问题。光学动作捕捉系统广泛应用在室内无人机编队、智能体测量、机器人控制系统开发等领域,在解决高鲁棒性追踪问题基础上,可以简化被测量目标的标记点部署,减小标记重量,简化测量流程,提升开发效率。
动作捕捉系统介绍
- 动作捕捉系统(后续简称 动捕系统 )能提供高精度且稳定的六自由度定位数据,能完全避免因室内磁场环境复杂导致无人机磁罗盘异常而无法正常飞行的问题,动捕系统的相机也需要放置在固定位置,所以比较适合在室内一个固定的场所搭建一个动捕场景,用来做一些室内实验是非常合适的,而我们也有针对于室内环境而打造的小型无人机集群平台,两者相辅相成,便可搭建一个室内的动捕无人机集群实验室。
货物验收
- 客户拿到全部的货物之后,应按照硬件清单一一检查各硬件模块的数量以及是否存在损坏异常等。
集群飞行功能
- 操作步骤:
-
打开电源,给路由器,地面端电脑等模块进行供电;
-
在地面端电脑上运行动捕系统软件;
-
将无人机放置在飞行区域中,在地面端电脑上确认动捕系统计算的无人机定位数据正常;
-
将1号无人机上电启动,在地面端电脑上通过NoMachine连接1号无人机的电脑,并启动位于1号机电脑桌面的 formation_mocap.sh 文件,确认各个节点启动正常后,将2,3,4,5号无人机按照2、3、1、4、5的顺序摆放,机头方向朝向动捕定位系统坐标系的X轴,然后上电启动;
无人机摆放位置尽量摆放在动捕定位数据坐标系Y轴上,间隔尽量保持1.5米及以上。
-
先进行单机定点飞行,确认无人机单机能够正常解锁并能够定点飞行;
-
在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常。
-
在位置控制节点的终端窗口中根据提示输入在本地坐标系下的目标位置X,Y,Z(单位为米)以及无人机偏航角(单位为弧度)数据;

-
在队形切换节点的终端窗口根据提示选择队形(目前仅支持以一字形或三角形起飞,不选择的情况下默认以一字形起飞);
-
在模式切换节点的终端窗口根据提示输入数字0选择解锁起飞,无人机集群便飞行至目标位置;
-
用户可根据个人使用情况按照提示正确输入队形控制,模式控制,位置控制相关指令。
四机正方形绕圈功能
- 操作步骤:
-
打开电源,给路由器,地面端电脑等模块进行供电;
-
在地面端电脑上运行动捕系统软件;
-
将无人机放置在飞行区域中,在地面端电脑上确认动捕系统计算的无人机定位数据正常
-
将1号无人机放置在飞行区域X,Y的正半轴部分后上电启动,在地面端电脑上通过NoMachine连接1号无人机的电脑,并启动位于1号机电脑桌面的formation_square_mocap.sh文件,确认各个节点启动正常后,将2,3,4号无人机按顺序依照顺时针的方向摆放,与1号机组成一个正方形,机头方向朝向动捕定位系统坐标系的X轴,然后上电启动;
-
先进行单机定点飞行,确认无人机单机能够正常解锁并能够定点飞行;
-
在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常;
-
在正方形绕圈控制节点终端窗口根据提示输入1启动正方形绕圈功能。
UWB无人机集群
注意!
在使用无人机编队套件之前,需熟练掌握无人机单机操作,无人机相关Wiki链接:P230Wiki链接
UWB介绍
- UWB测距是使用双向飞行时间法(TW-TOF,two way-time of flight ),TOF测距方法属于双向测距技术,它主要利用信号在两个异步收发机(Transceiver)之间往返的飞行时间来测量节点间的距离。节点间的距离能得到,那么我们就可以进行定位了,UWB定位技术的原理和GPS卫星导航定位原理是类似的,都是通过无人机上面的标签与四个基站之间进行测距,再通过算法就可以把无人机的位置数据计算出来。
UWB无人机集群介绍
- UWB定位技术可在满足基站搭建的环境下提供稳定以及有效的定位,因此可在一些非GPS的区域进行无人机飞行,室内室外兼备,再加上基站模块具有轻巧,方便携带的特点,使得基站摆放,飞行区域的搭建非常的方便,只需要几分钟就可以搭建好,就非常适用于无人机飞行的区域经常变更,而且会在无GPS的区域下飞行的情况。而结合无人机集群飞行,使得UWB无人机集群方案成为室内无人机集群飞行的一个低成本方案,而且由于可变更区域,使得UWB无人机集群更加灵活。
货物验收
- 客户拿到全部的货物之后,应按照硬件清单一一检查各硬件模块的数量以及是否存在损坏异常等。
集群飞行功能
-
按要求摆放基站
基站摆放:
UWB定位基站共有4个,分别命名为A0, A1, A2, A3。在这以10米 X 10米的正方形空间举例,位置摆放以A0为中心,A0 -> A1为正北方向,然后按顺时针依次摆放A2, A3基站。如下图所示:
基站摆放注意事项:
① 基站的高度尽量一致
② 基站相互之间无障碍物遮挡
③ 将基站正面朝向位于对角线的基站,A0与A2对应,A1与A3对应(基站正面有坐标系图案,背面写有名称)
-
基站标定:
首先,到 LinkTrack官网的下载页面下载NAssistant软件,网址为:https://www.nooploop.com/download/。
当发生基站相对位置改变以及定位精度不够等情况时,需要进行一键标定,方法如下:
通过USB将任意一个基站与电脑连接,其余基站正常供电,打开NAssistant软件,软件将自动连接,点击LinkTrack设置将弹出一个界面,再点击一键标定,等待基站坐标值稳定下来之后,退出软件,拔下USB,给基站重新上电,一键标定就完成了。


-
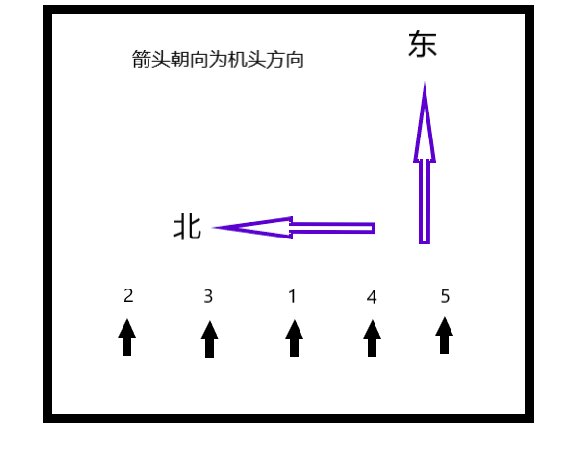
摆放无人机:
无人机摆放遵从以下要求:
①机头方向朝向东方,也就是A0指向A3的方向
②无人机按从北往南依次摆放编号为2,3,1,4,5号飞机
③飞机摆放位置的间隔尽量均匀,推荐间隔2米以上
-
先进行单机定点飞行,确认无人机单机能够正常解锁并能够定点飞行;
-
将1号无人机上电启动,在地面端电脑上通过NoMachine连接1号无人机的电脑,并启动位于1号机电脑桌面的formation_uwb.sh文件,确保各节点启动正常;
-
在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常;
-
在模式切换节点的终端窗口根据提示输入数字0选择解锁起飞,无人机集群便飞行至目标位置;
-
在位置控制节点的终端窗口输入正确的控制指令;
-
在集群控制节点的终端窗口输入1开始控制无人机集群;
-
可切换为一字队形或三角队形;

-
用户可根据个人使用情况按照提示正确输入队形控制,模式控制,位置控制相关指令
GPS无人机集群
注意!
在使用无人机编队套件之前,需熟练掌握无人机单机操作,无人机相关Wiki链接:P230无人机Wiki:P230Wiki链接
P600无人机Wiki: P600Wiki链接
-
GPS介绍
GPS指全球定位系统,全球定位系统是一种以人造地球卫星为基础的高精度无线电导航的定位系 统,GPS在我们生活中比较常见,在汽车以及手机等物品上经常使用,在无人机中,GPS也是作为室外飞行经常使用的定位来源,对无人机来说,虽然精度不高,但成本较低,并且模块较小,在全球范围内都能提供一个较好的定位数据。
-
GPS无人机集群介绍
GPS作为无人机最常用的定位模块,具有低成本,无人机一体化等优点,用作室外的无人机集群
飞行是非常合适的,因室外飞行区域比较大,所以在通信模块上我们选用了传输距离更大以及带宽更大的图数传模块。
-
货物验收
客户拿到全部的货物之后,应按照硬件清单一一检查各硬件模块的数量以及是否存在损坏异常 等。
-
集群飞行功能(旧版)
注意!
在2021年9月我们对GPS无人机集群功能进行了升级,增添了无人机位置差值纠偏功能,用户可在使用时不严格按照无人机排序进行摆放,在此之前的用户可继续沿用旧版功能,如需升级到新版,请联系我们的售后工作人员。新版功能操作请浏览集群飞行功能(新版部分) -
操作步骤:
-
打开电源,给地面端电脑,图数传基站等模块进行供电;
-
将无人机按要求摆放:
提示:
-
无人机从北到南依次摆放2,3,1,4,5号无人机;
-
无人机机头方向应朝向东方;
-
无人机间隔距离尽量保持两米以上。
-
-
先进行单机定点飞行,确认无人机单机能够正常解锁并能够定点飞行;
-
将1号无人机上电启动,在地面端电脑上通过NoMachine连接1号无人机的电脑,并启动位于1号机电脑桌面的 formation_gps.sh 文件,确认各个节点启动正常后,上电启动2,3,4,5号无人机;
-
在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常;

-
在位置控制节点的终端窗口中根据提示输入在本地坐标系下的目标位置X,Y,Z(单位为米)以及无人机偏航角(单位为弧度)数据;
-
在队形切换节点的终端窗口根据提示选择队形(目前仅支持以一字形或三角形起飞,不选择的情况下默认以一字形起飞);

-
在模式切换节点的终端窗口根据提示输入数字0选择解锁起飞,无人机集群便飞行至目标位置;
-
用户可根据个人使用情况按照提示正确输入队形控制,模式控制,位置控制相关指令。
-
集群飞行功能(新版)
注意!
此处操作步骤说明为2021年9月份之后的新版操作说明,2021年9月份后购买的以及升级后的用户可参考该操作步骤说明操作,旧版请查看集群飞行功能(旧版)的操作说明。 -
操作步骤:
-
打开电源,给地面端电脑,图数传基站等模块进行供电;
-
将无人机按要求摆放:
提示:
-
无人机从北到南依次摆放2,3,1,4,5号无人机;
-
无人机机头方向应朝向东方;
-
无人机间隔距离尽量保持两米以上。
-
有位置差值纠偏功能,可以不以一字型摆放无人机,上下左右都可以偏移,但需要注意飞机飞行方向不可冲突,否则可能会引起无人机碰撞。
-
-
先进行单机定点飞行,确认无人机单机能够正常解锁并能够定点飞行;
-
将1号无人机上电启动,在地面端电脑上通过NoMachine连接1号无人机的电脑,并启动位于1号机电脑桌面的 formation_gps.sh 文件,确认各个节点启动正常后,上电启动2,3,4,5号无人机;
-
在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常;
-
在队形切换节点的终端窗口根据提示选择队形(目前仅支持以一字形或三角形起飞,不选择的情况下默认以一字形起飞);
-
在模式切换节点的终端窗口根据提示输入数字0选择解锁起飞,无人机集群便起飞至预设起飞高度;
-
在位置控制节点的终端窗口中根据提示输入在本地坐标系下的目标位置X,Y,Z(单位为米)以及无人机偏航角(单位为弧度)数据,此时无人机纠偏数据开始生效,无人机将自动纠正位置;
-
用户可根据个人使用情况按照提示正确输入队形控制,模式控制,位置控制相关指令。

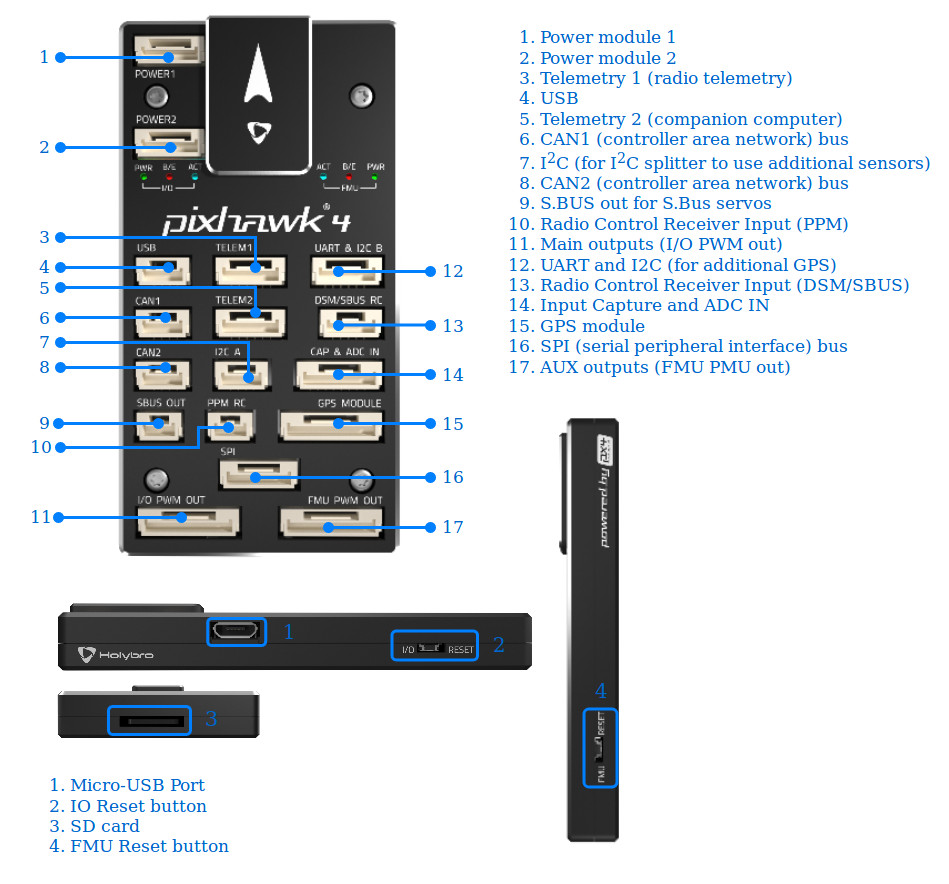
USB port
| Pin | Signal | Volt |
| 1(red) | VBUS | +5V |
| 2(black) | DM | +3.3V |
| 3(black) | DP | +3.3V |
| 4(black) | GND | GND |
POWER1 POWER2 port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | VCC | +5V |
| 3(black) | CURRENT | +3.3V |
| 4(black) | VOLTAGE | +3.3V |
| 5(black) | GND | GND |
| 6(black) | GND | GND |
TELEM1, TELEM2 ports
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | TX(out) | +3.3V |
| 3(black) | RX(in) | +3.3V |
| 4(black) | CTS(in) | +3.3V |
| 5(black) | RTS(out) | +3.3V |
| 6(black) | GND | GND |
UART & I2C B port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | TX(out) | +3.3V |
| 3(black) | RX(in) | +3.3V |
| 4(black) | SCL2 | +3.3V |
| 5(black) | SDA2 | +3.3V |
| 6(black) | GND | GND |
-
A spare port for connecting sensors supporting serial communication or I2C e.g. a second GPS module can be connected here.
-
用于连接支持串行通信或I2C的传感器的备用端口,例如,可以在此处连接第二个GPS模块。
CAN1, CAN2 ports
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | CANH | +3.3V |
| 3(black) | CANL | +3.3V |
| 4(black) | GND | GND |
DSM RC port
| Pin | Signal | Volt |
| 1(null) | VDD_5V_SBUS_RC | +5V |
| 2(yellow) | SBUS * | +3.3V |
| 3(null) | RSSI * | +3.3V |
| 4(red) | VDD_3v3_SPEKTRUM | +3.3V |
| 5(black) | GND | GND |
-
Connect SBUS or DSM/Spektrum receiver’s signal wire connect here.
-
Sends the RC signal strength info to autopilot.
-
将SBU或DSM/Spektrum接收器的信号线连接到此处。
-
向自动驾驶仪发送RC信号强度信息。
SBUS RC port
| Pin | Signal | Volt |
| 1(red) | VDD_5V_SBUS_RC | +5V |
| 2(yellow) | SBUS | +3.3V |
| 3(null) | RSSI | +3.3V |
| 4(null) | VDD_3V3_SPEKTRUM | +3.3V |
| 5(black) | GND | GND |
I2C A port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | SCL4 | +3.3V |
| 3(black) | SDA4 | +3.3V |
| 4(black) | GND | GND |
CAP & ADC IN port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2 black) | FMU_CAP1 | +3.3V |
| 3(black) | FMU_CAP2 | +3.3V |
| 4(black) | FMU_CAP3 | +3.3V |
| 5(black) | TIM5_SPARE_4 | +3.3V |
| 6(black) | ADC1_SPARE_1 | +3.3V* |
| 7(black) | ADC1_SPARE_2 | +6.6V* |
| 8(black) | GND | GND |
- WARNING: Sensors connected to this pin should not send a signal exceeding this voltage!
- 警告:连接到此引脚的传感器不应发送超过此电压的信号!
SBUS OUTport
| Pin | Signal | Volt |
| 1(red) | ||
| 2(yellow) | SBUS_OUT | +3.3V |
| 3(black) | GND | GND |
PPM RC port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(yellow) | PPM | +3.3V |
| 3(black) | GND | GND |
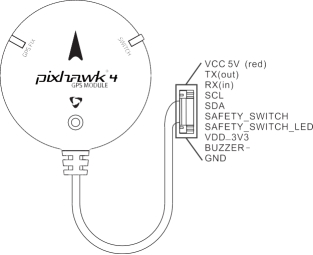
GPS MODULE port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2 black) | TX(out) | +3.3V |
| 3(black) | RX(in) | +3.3V |
| 4(black) | SCL1 | +3.3V |
| 5(black) | SDA1 | +3.3V |
| 6(black) | SAFETY_SWITCH | +3.3V |
| 7(black) | SAFETY_SWITCH_LED | +3.3V |
| 8(black) | VDD_3V3 | +3.3V |
| 9(black) | BUZZER- | 0V/5V |
| 10(black) | GND | GND |
SPI port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2 (black) | SCK | +3.3V |
| 3(black) | MISO | +3.3V |
| 4(black) | MOSI | +3.3V |
| 5(black) | CS1 | +3.3V |
| 6(black) | CS2 | +3.3V |
| 7(black) | GND | GND |
I/O PWM OUT port
| Pin | Signal | Volt |
| 1(red) | VDD_SERVO | |
| 2 black) | IO_CH1 | +3.3V |
| 3(black) | IO_CH2 | +3.3V |
| 4(black) | IO_CH3 | +3.3V |
| 5(black) | IO_CH4 | +3.3V |
| 6(black) | IO_CH5 | +3.3V |
| 7(black) | IO_CH6 | +3.3V |
| 8(black) | IO_CH7 | +3.3V |
| 9(black) | IO_CH8 | +3.3V |
| 10(black) | GND | GND |
FMU PWM OUT port
| Pin | Signal | Volt |
| 1(red) | VDD_SERVO | |
| 2 black) | FMU_CH1 | +3.3V |
| 3(black) | FMU_CH2 | +3.3V |
| 4(black) | FMU_CH3 | +3.3V |
| 5(black) | FMU_CH4 | +3.3V |
| 6(black) | FMU_CH5 | +3.3V |
| 7(black) | FMU_CH6 | +3.3V |
| 8(black) | FMU_CH7 | +3.3V |
| 9(black) | FMU_CH8 | +3.3V |
| 10(black) | GND | GND |
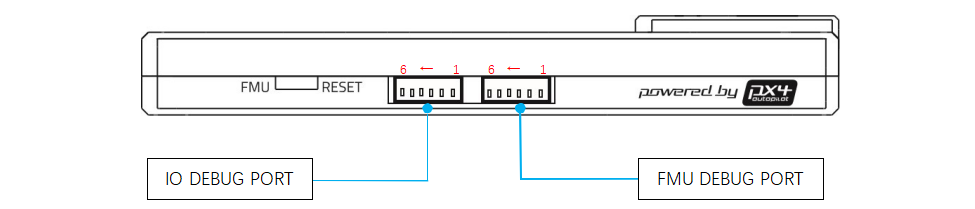
IO DEBUG PORT
| Pin | Signal | Volt |
| 1(red) | VT | +3.3V |
| 2(black) | TX | +3.3V |
| 3(black) | NC | |
| 4(black) | SWDIO | +3.3V |
| 5(black) | SWCLK | +3.3V |
| 6(black) | GND | GND |
FMU DEBUG port
| Pin | Signal | Volt |
| 1(red) | VT | +3.3V |
| 2(black) | TX | +3.3V |
| 3(black) | RX | +3.3V |
| 4(black) | SWDIO | +3.3V |
| 5(black) | SWCLK | +3.3V |
| 6(black) | GND | GND |
USB port
| Pin | Signal | Volt |
| 1(red) | VBUS | +5V |
| 2(black) | DM | +3.3V |
| 3(black) | DP | +3.3V |
| 4(black) | GND | GND |
POWER1 POWER2 port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | VCC | +5V |
| 3(black) | CURRENT | +3.3V |
| 4(black) | VOLTAGE | +3.3V |
| 5(black) | GND | GND |
| 6(black) | GND | GND |
TELEM1, TELEM2 ports
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | TX(out) | +3.3V |
| 3(black) | RX(in) | +3.3V |
| 4(black) | CTS(in) | +3.3V |
| 5(black) | RTS(out) | +3.3V |
| 6(black) | GND | GND |
UART & I2C B port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | TX(out) | +3.3V |
| 3(black) | RX(in) | +3.3V |
| 4(black) | SCL2 | +3.3V |
| 5(black) | SDA2 | +3.3V |
| 6(black) | GND | GND |
-
A spare port for connecting sensors supporting serial communication or I2C e.g. a second GPS module can be connected here.
-
用于连接支持串行通信或I2C的传感器的备用端口,例如,可以在此处连接第二个GPS模块。
CAN1, CAN2 ports
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | CANH | +3.3V |
| 3(black) | CANL | +3.3V |
| 4(black) | GND | GND |
DSM RC port
| Pin | Signal | Volt |
| 1(null) | VDD_5V_SBUS_RC | +5V |
| 2(yellow) | SBUS * | +3.3V |
| 3(null) | RSSI * | +3.3V |
| 4(red) | VDD_3v3_SPEKTRUM | +3.3V |
| 5(black) | GND | GND |
-
Connect SBUS or DSM/Spektrum receiver’s signal wire connect here.
-
Sends the RC signal strength info to autopilot.
-
将SBU或DSM/Spektrum接收器的信号线连接到此处。
-
向自动驾驶仪发送RC信号强度信息。
SBUS RC port
| Pin | Signal | Volt |
| 1(red) | VDD_5V_SBUS_RC | +5V |
| 2(yellow) | SBUS | +3.3V |
| 3(null) | RSSI | +3.3V |
| 4(null) | VDD_3V3_SPEKTRUM | +3.3V |
| 5(black) | GND | GND |
I2C A port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(black) | SCL4 | +3.3V |
| 3(black) | SDA4 | +3.3V |
| 4(black) | GND | GND |
CAP & ADC IN port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2 black) | FMU_CAP1 | +3.3V |
| 3(black) | FMU_CAP2 | +3.3V |
| 4(black) | FMU_CAP3 | +3.3V |
| 5(black) | TIM5_SPARE_4 | +3.3V |
| 6(black) | ADC1_SPARE_1 | +3.3V* |
| 7(black) | ADC1_SPARE_2 | +6.6V* |
| 8(black) | GND | GND |
- WARNING: Sensors connected to this pin should not send a signal exceeding this voltage!
- 警告:连接到此引脚的传感器不应发送超过此电压的信号!
SBUS OUTport
| Pin | Signal | Volt |
| 1(red) | ||
| 2(yellow) | SBUS_OUT | +3.3V |
| 3(black) | GND | GND |
PPM RC port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2(yellow) | PPM | +3.3V |
| 3(black) | GND | GND |
GPS MODULE port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2 black) | TX(out) | +3.3V |
| 3(black) | RX(in) | +3.3V |
| 4(black) | SCL1 | +3.3V |
| 5(black) | SDA1 | +3.3V |
| 6(black) | SAFETY_SWITCH | +3.3V |
| 7(black) | SAFETY_SWITCH_LED | +3.3V |
| 8(black) | VDD_3V3 | +3.3V |
| 9(black) | BUZZER- | 0V/5V |
| 10(black) | GND | GND |
SPI port
| Pin | Signal | Volt |
| 1(red) | VCC | +5V |
| 2 (black) | SCK | +3.3V |
| 3(black) | MISO | +3.3V |
| 4(black) | MOSI | +3.3V |
| 5(black) | CS1 | +3.3V |
| 6(black) | CS2 | +3.3V |
| 7(black) | GND | GND |
I/O PWM OUT port
| Pin | Signal | Volt |
| 1(red) | VDD_SERVO | |
| 2 black) | IO_CH1 | +3.3V |
| 3(black) | IO_CH2 | +3.3V |
| 4(black) | IO_CH3 | +3.3V |
| 5(black) | IO_CH4 | +3.3V |
| 6(black) | IO_CH5 | +3.3V |
| 7(black) | IO_CH6 | +3.3V |
| 8(black) | IO_CH7 | +3.3V |
| 9(black) | IO_CH8 | +3.3V |
| 10(black) | GND | GND |
FMU PWM OUT port
| Pin | Signal | Volt |
| 1(red) | VDD_SERVO | |
| 2 black) | FMU_CH1 | +3.3V |
| 3(black) | FMU_CH2 | +3.3V |
| 4(black) | FMU_CH3 | +3.3V |
| 5(black) | FMU_CH4 | +3.3V |
| 6(black) | FMU_CH5 | +3.3V |
| 7(black) | FMU_CH6 | +3.3V |
| 8(black) | FMU_CH7 | +3.3V |
| 9(black) | FMU_CH8 | +3.3V |
| 10(black) | GND | GND |
IO DEBUG PORT
| Pin | Signal | Volt |
| 1(red) | VT | +3.3V |
| 2(black) | TX | +3.3V |
| 3(black) | NC | |
| 4(black) | SWDIO | +3.3V |
| 5(black) | SWCLK | +3.3V |
| 6(black) | GND | GND |
FMU DEBUG port
| Pin | Signal | Volt |
| 1(red) | VT | +3.3V |
| 2(black) | TX | +3.3V |
| 3(black) | RX | +3.3V |
| 4(black) | SWDIO | +3.3V |
| 5(black) | SWCLK | +3.3V |
| 6(black) | GND | GND |

Descriptions:
We empoldered this new GPS for you to work with PIXHAWK4. It has UBLOX M8N module on it, as well as IST8310 compass and tri-colored LED indicator. Also the Safety switch on it will make the connection more convenient and simple.
This module ships with a baud rate of 38400 5Hz
描述:
我们开发了这个新的全球定位系统,让你可以使用PIXHAWK4。它上面有UBLOX M8N模块,如图所示 以及IST8310指南针和三色LED指示灯。此外,它上的安全开关将使 连接更加方便和简单。
该模块的波特率为38400 5Hz。
Features and Specifications: (功能和规格)
-
Ublox Neo-M8N module Ublox (Neo-M8N模块)
-
Industry leading –167 dBm navigation sensitivity (行业领先–167 dBm导航灵敏度)
-
Cold starts: 26s (冷启动:26秒)
-
LNA MAX2659ELT+ (LNA MAX2659ELT+)
-
25 x 25 x 4 mm ceramic patch antenna (25 x 25 x 4毫米陶瓷贴片天线)
-
Rechargeable Farah capacitance (可充电法拉电容)
-
Low noise 3.3V regulator (低噪声3.3V稳压器)
-
Fix indicator LEDs (固定指示灯LED)
-
Protective case (保护壳)
-
26cm Pixhawk4 compatible 10-pin cable included (26cm Pixhawk4兼容10针电缆)
-
Diameter 50mm total size, 32 grams with case (直径50毫米总尺寸32克带外壳)
Package Included: (套餐包括)
-
NEO-M8 with compass module *1 (NEO-M8带指南针模块 *1)
-
‘X’ type folding pedestal mount *1 (“X”型折叠底座安装 *1)
-
Carbon rod 70mm & 140mm *1 (碳棒70mm和140mm *1)
*GPS Pin Map*


Holybro is a registered trademark of Holybro, registered in the U.S. and other countries.
©Copyright 2018 Holybro. All Rights Reserved.
Pixhawk and its logo are registered trademarks of Lorenz Meier. Used under license.
连接飞控
-
连接飞控有两种方式:一种是通过数据线连接。另一种是通过飞机的WiFi数传连接。
通过普通安卓micro-usb数据线连接
-
连接飞机与电脑,此时会自动连接QGC
通过WiFi数传连接
首先电脑选择WiFi名称并输入密码连接。WIFI的标签在飞机底部。
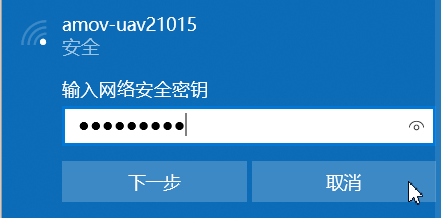
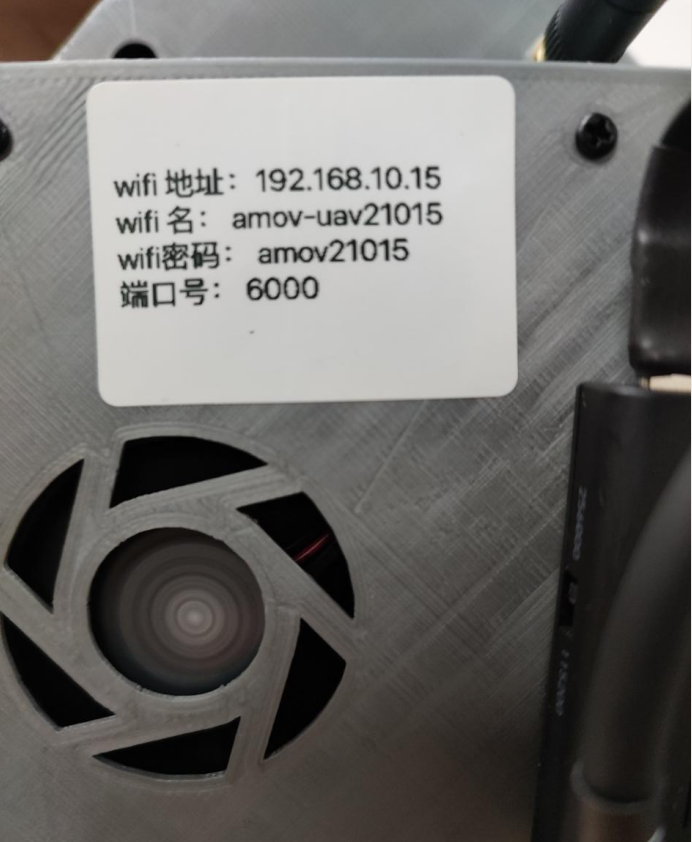
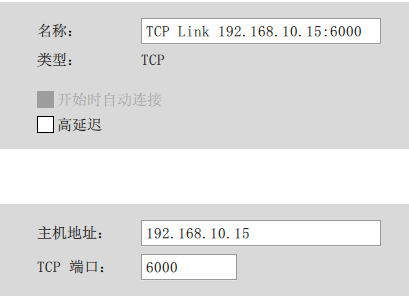
然后输入IP地址与端口号,点击连接即可。
演示视频
-
操作视频演示如下:
固件烧写
注意!
烧写固件时,应将飞控断电,仅用USB连接到电脑。若地面站为识别飞控,可多次插拔USB。
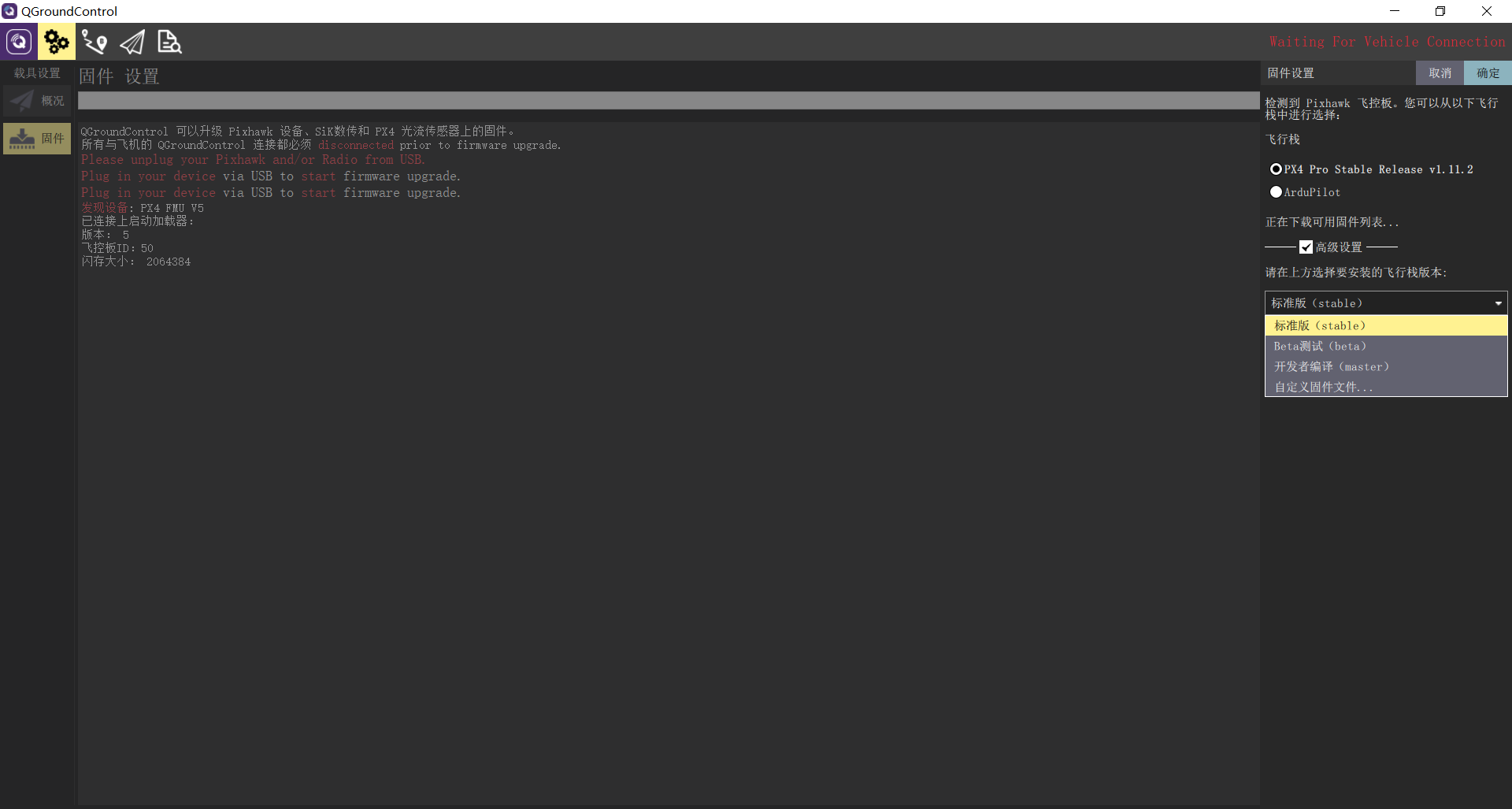
选择烧写固件
-
操作界面选择在三个齿轮下,在“固件”界面下,用usb线连接电脑与飞控。会弹出如图所示的界面,右方点击“高级设置”,选择标准版。点击确定。如果有自己的固件,可以选择“自定义固件”,找到自己的固件相应路径,点击确定即可烧写。
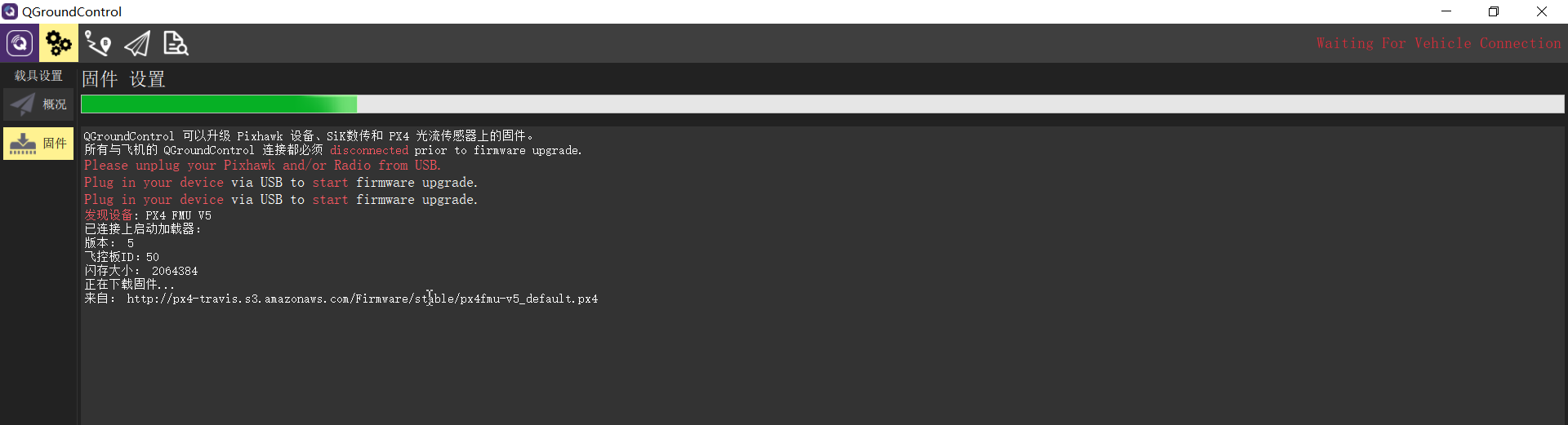
烧写过程
-
固件正在刷写中,最后一行显示为固件的版本。
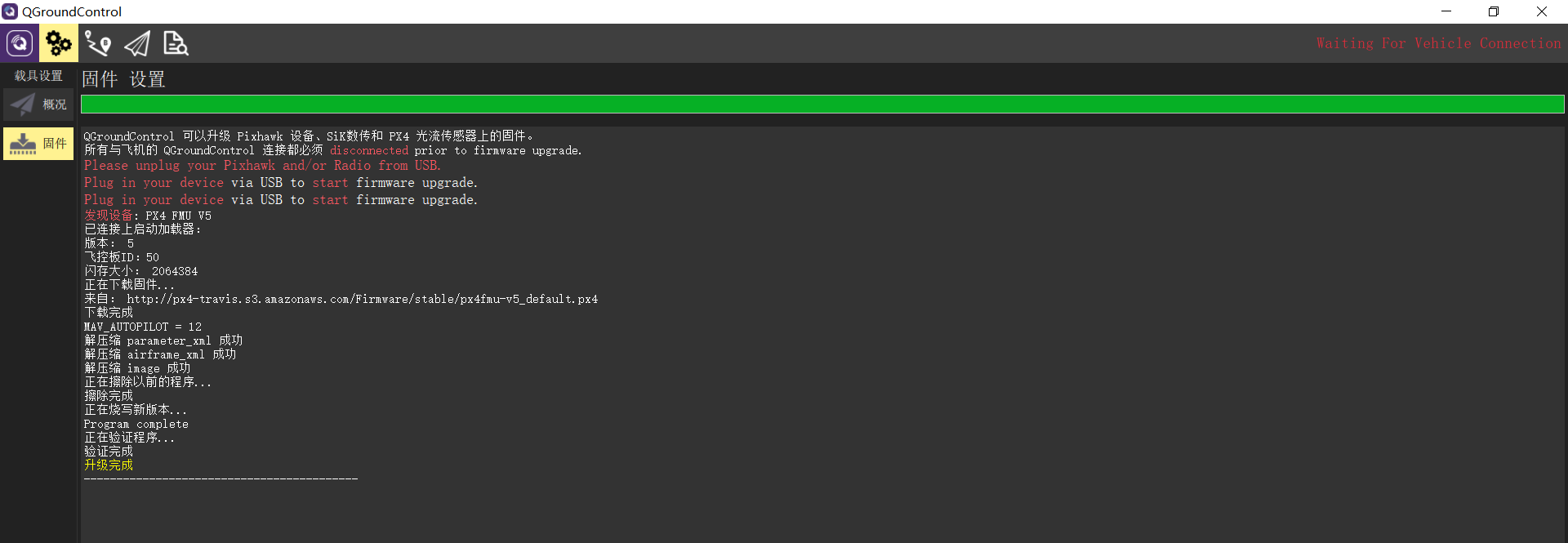
烧写完成
-
固件烧写成功后入下图所示,会有升级完成的提示
演示视频
-
操作视频演示如下:
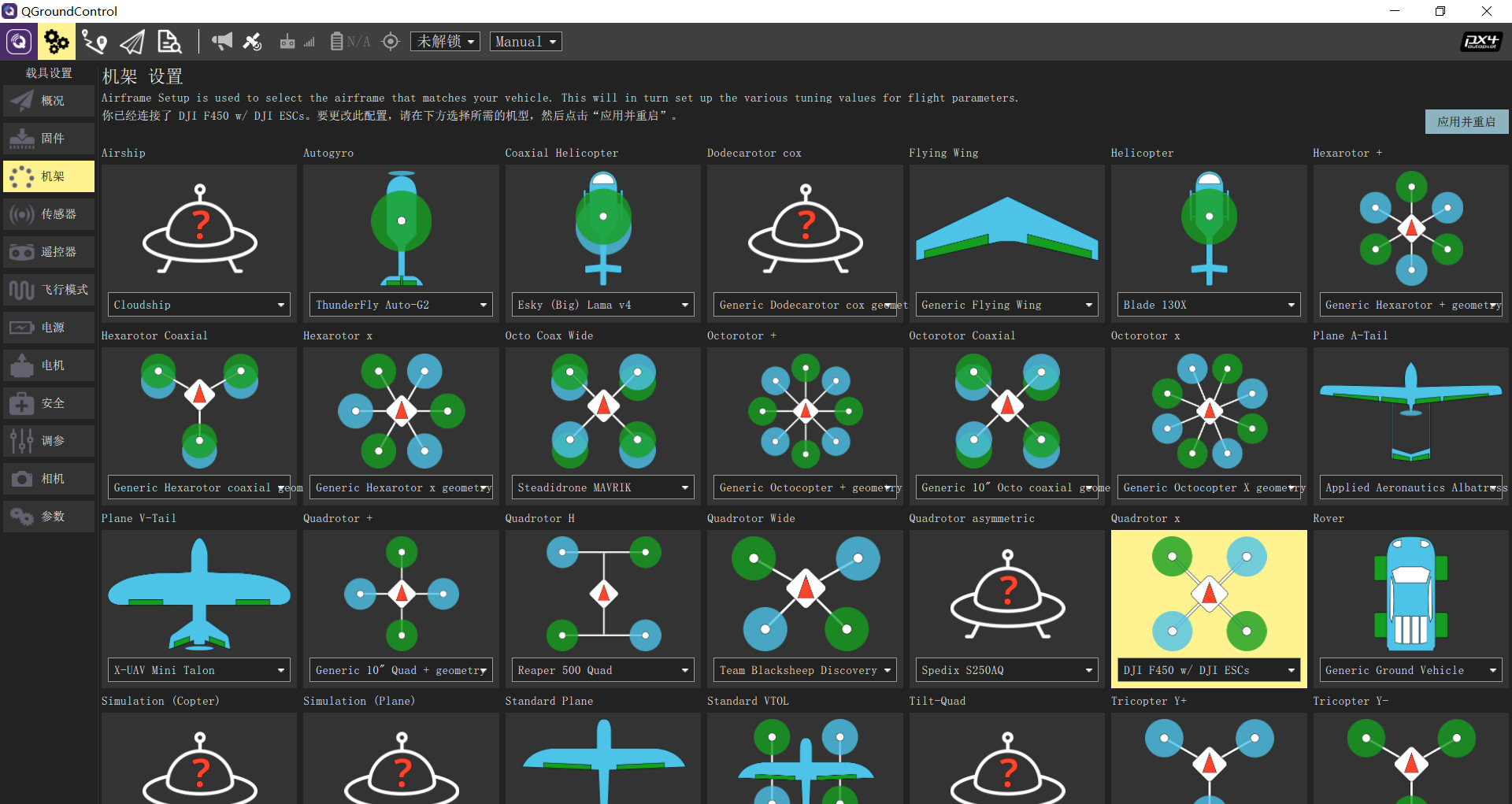
机架的选择
-
如图所示,在“机架”界面选择标准四旋翼机架,选择DJI F450,然后在右上角点击“应用并重启”
演示视频
-
操作视频演示如下:
传感器校准
磁力计校准
-
按照地面站界面所显示的相应摆放飞机的姿态,然后在水平面内朝一个方向旋转,直至下一个方向。
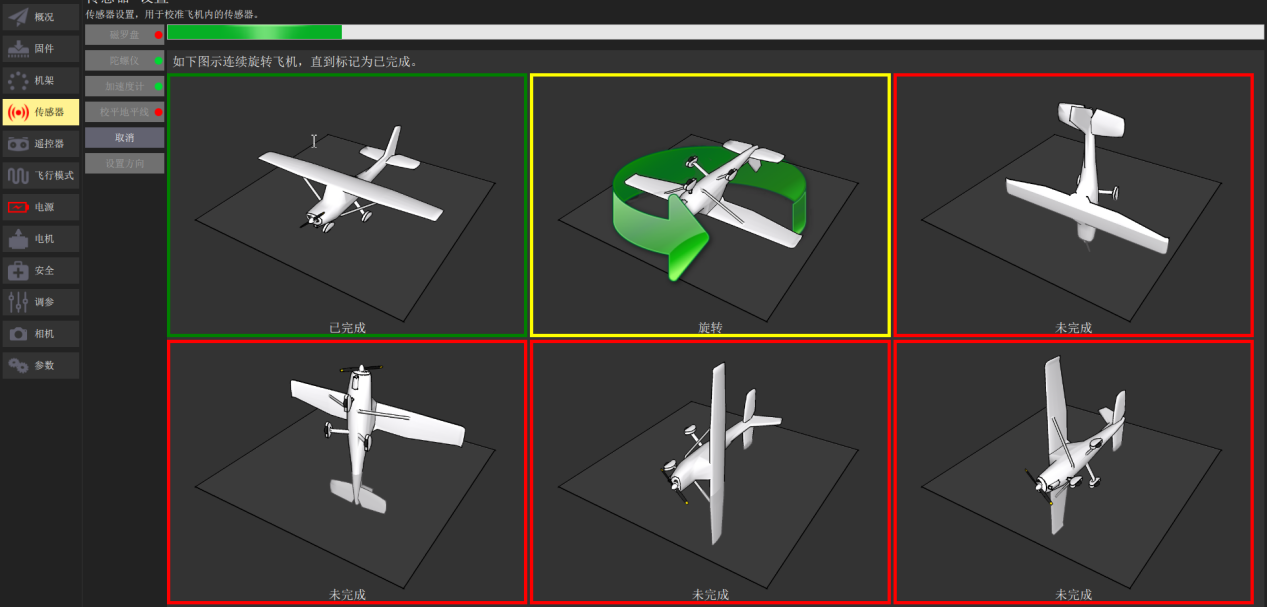
校准完成后如下图所示
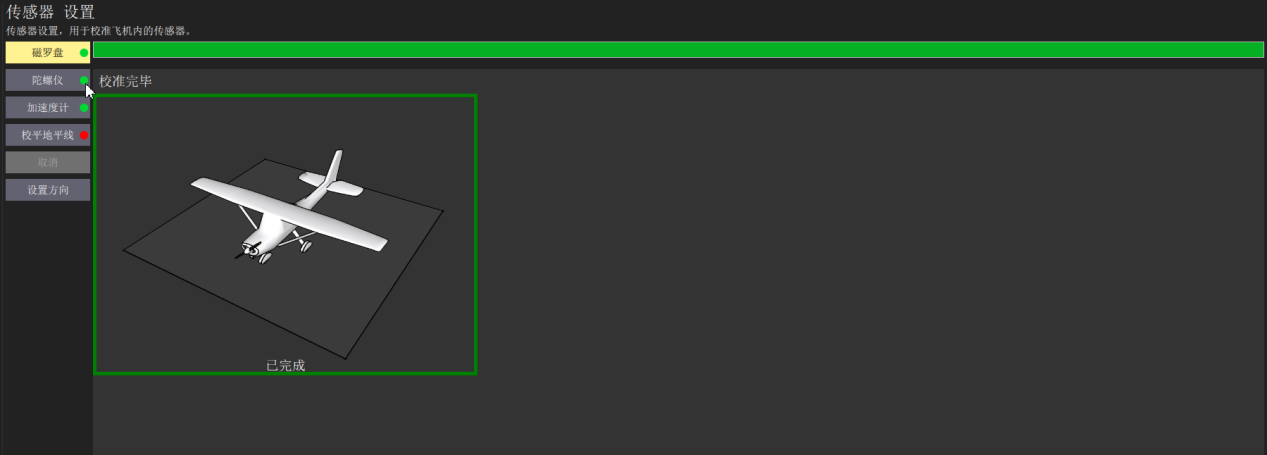
陀螺仪校准
-
陀螺仪校准只需要把飞机平放即可,校准完成后会边框会显示为绿色。
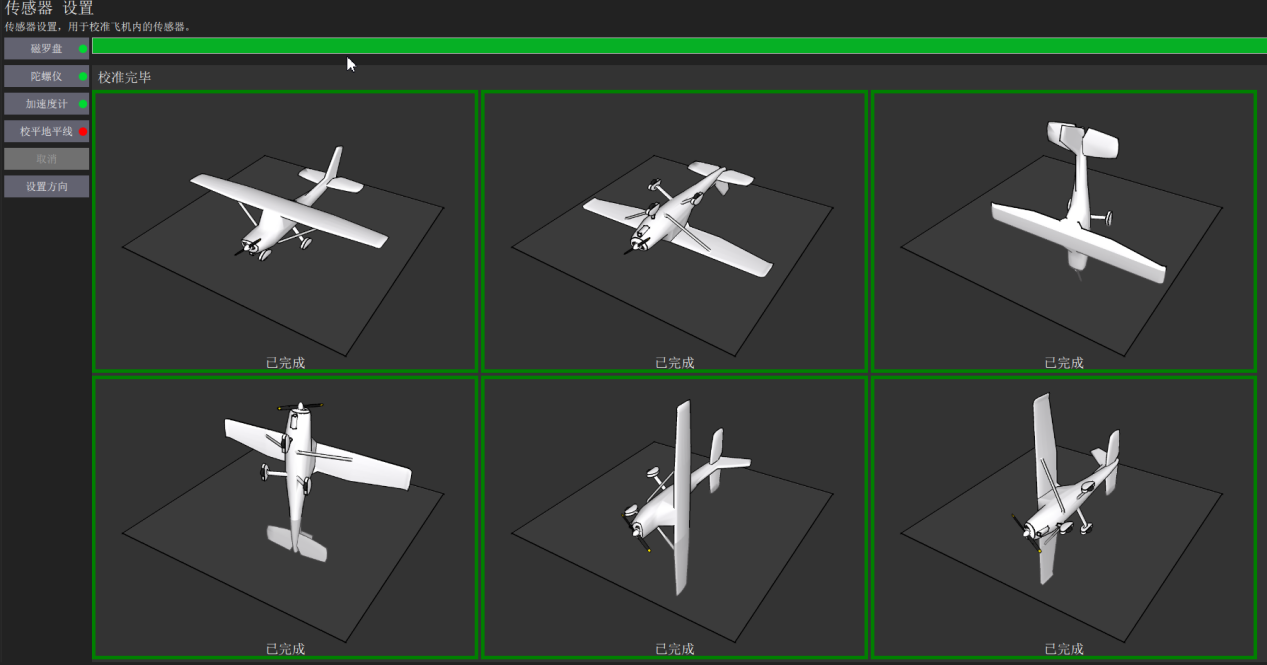
加速度计校准
-
加速度计校准为6面校准,只需要将飞机按照6个面分别摆放即可,没校准的边框为红色,正在校准中边框为黄色,校准完成边框为绿色。

水平面校准
-
水平面校准只需要将飞机放平即可,校准完成后会有“calibration done”的字样,意为校准完成。

演示视频
-
操作视频演示如下:
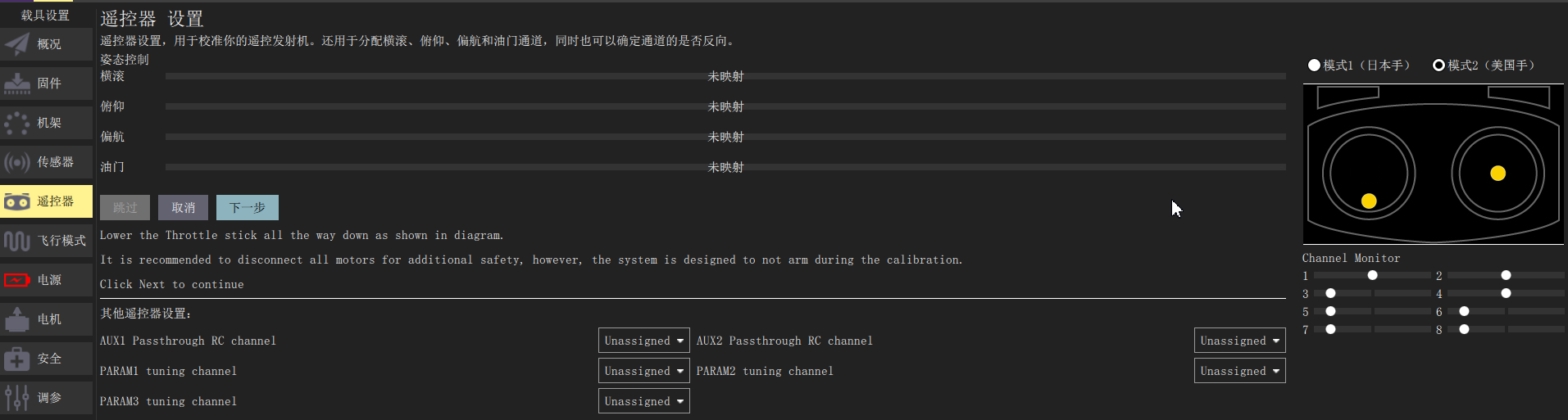
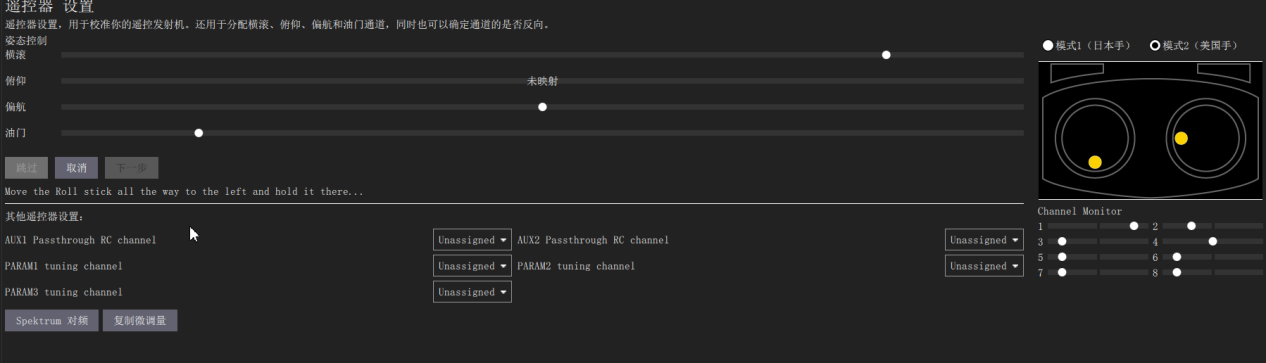
遥控器校准
-
点击校准,然后将油门拨到最低,如下图所示
-
然后按照界面右方的操作指示拨动摇杆
-
当全部操作校准完成后,会显示如下界面,此时将油门拨到最低,然后点击下一步。

-
当连续点击两次下一步后,会有如下界面,就表示此时校准已经完成。

演示视频
-
操作视频演示如下:
飞行模式设置
飞行模式介绍
手动模式
-
ARCO:特技模式
遥控器输入被转换为横滚、俯仰和偏航速度,当摇杆回中时飞行器不会保持平衡,可以用于翻滚等特技飞行。
-
RATTITUDE:角速率模式
遥控器输入在极限区域被转换为横滚、俯仰的角度和偏航的速度,否则被转换为横滚、俯仰和偏航角度。
-
STABILIZED:稳定模式
遥控器输入被转换为横滚、俯仰的角度和偏航的速度,当摇杆回中后飞行器会保持平衡,之后会随风或其他因素漂移。
辅助模式
-
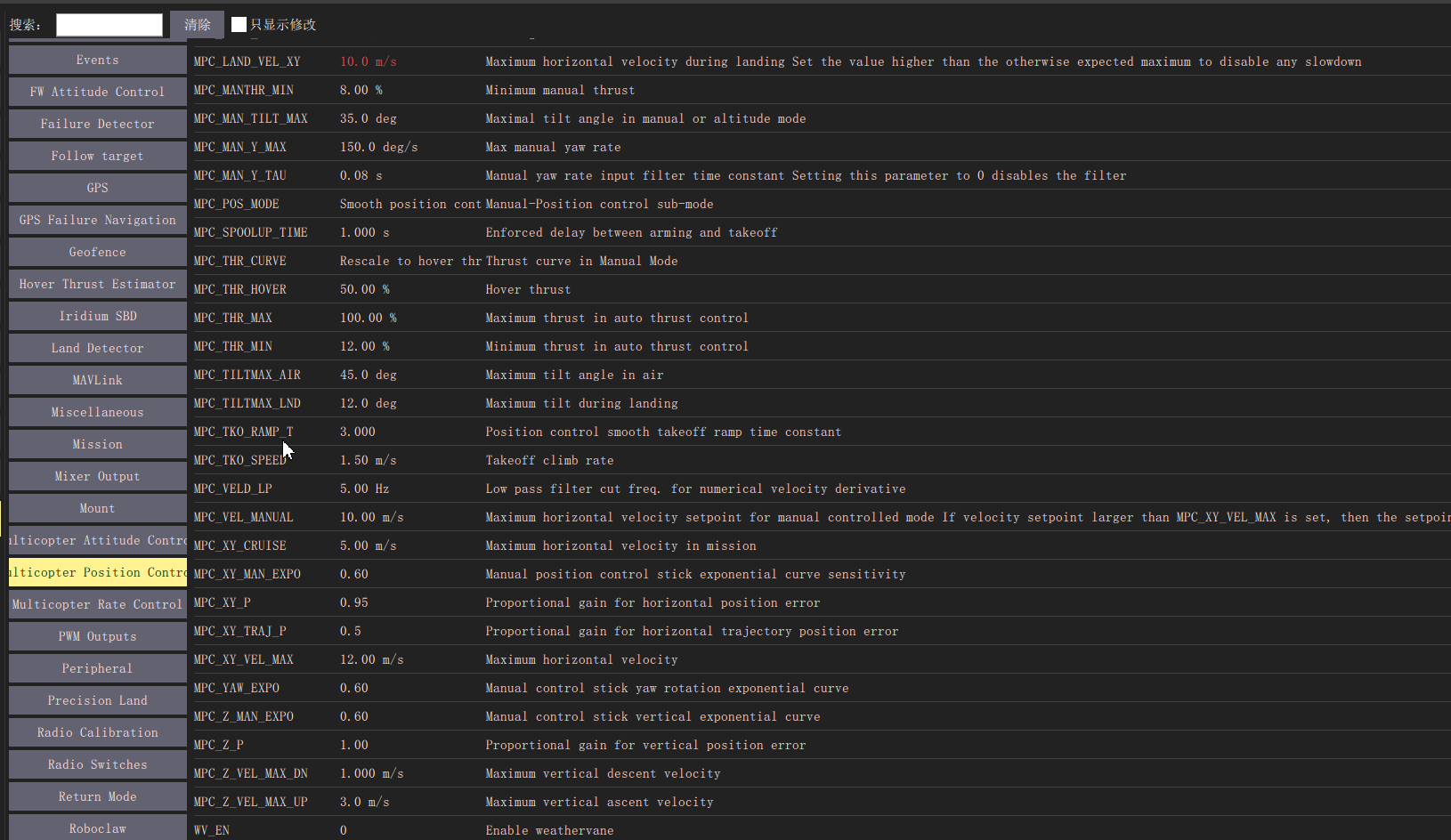
ALTITUDE CONTROL:高度模式横滚、俯仰和偏航的输入与手动模式一致;当摇杆在~50%油门左右,飞行器将保持当前高度;油门有一个很大的死区,超出后控制上升或下降速度。参数:MPC_Z_VEL_MAX_UP:最大上升速度,默认3.0m/s。MPZ_Z_VEL_MAX_DOWN:最大下降速度,默认1.0m/s。RCX_DZ:X通道(油门通道,由RC_MAP_THROTTLE设定)的死区;MPC_XXX:影响飞行表现的参数,例如MPC_THR_HOVER定义飞行器悬停的油门。
-
POSITION CONTROL:位置模式横滚控制左右移动速度、俯仰控制前后移动速度,当摇杆回中时飞行器会保持位置;偏航控制速度,与手动模式一致;油门控制上升或下降的速率,与ALTITUDE一致;
自动模式
-
HOLD:保持模式保持在当前位置和姿态(依赖GPS)。参数:MIS_LTRMIN_ALT:悬停最小高度(如果悬停高度低,飞行器会升高)。
-
RTL:返航模式返回HOME位置等待或降落(依赖GPS)。飞行器会首先上升到RTL_RETURN_ALT高度(默认60m,如果实际飞行高于此高度则保持),然后直线飞行HOME位置;到达HOME后,会快速降低到RTL_DESCEND_ALT高度(缓降或停止高度,默认30m),会悬停RTL_LAND_DELAY时间后降落(默认0s,设置为-1表示永远悬停);参数:RTL_MIN_DIST:触发上升的最小距离,如果水平位置离HOME很近,飞行器将直接降落到HOME而非升高到返回高度。
-
TAKE OFF:起飞模式起飞并等待下一步指令(依赖GPS)。该模式为自动模式,遥控器失效(除非切换模式),启动前必须先解锁;飞行器上升到MIS_TAKEOFF_ALT高度(默认2.5m)后等待,上升速度为MPC_TKO_SPEED(默认1.5m/s)。
-
LAND:降落模式在当前位置降落。该模式为自动模式(遥控器失效);飞行器在切换到该模式位置降落,下降速度为MPC_LAND_SPEED直至地面
-
MISSION:任务模式飞行器接受地面站的程序控制指令,如果未收到任务,在当前位置悬停(依赖GPS)。该模式为自动模式,遥控器失效,该模式工作前需解锁;任务通常在QGC创建,也可以通过开发者API,上传到飞控。如果任务已存储并且PX4在飞行,将从立即执行任务;如果任务已存储但PX4着陆,PX4将执行任务,如果任务没有TAKEOFF命令,PX4将在执行剩下任务前飞行至最小高度;如果任务未存储或PX4执行完所有任务命令,飞行状态飞行器会悬停,着陆状态飞行器会等待;可以在QGC手动修改当前任务;当飞行器锁定或新任务上传后,任务会重置;任务可以通过HOLD模式暂停,重新激活后会从继续执行当前任务;
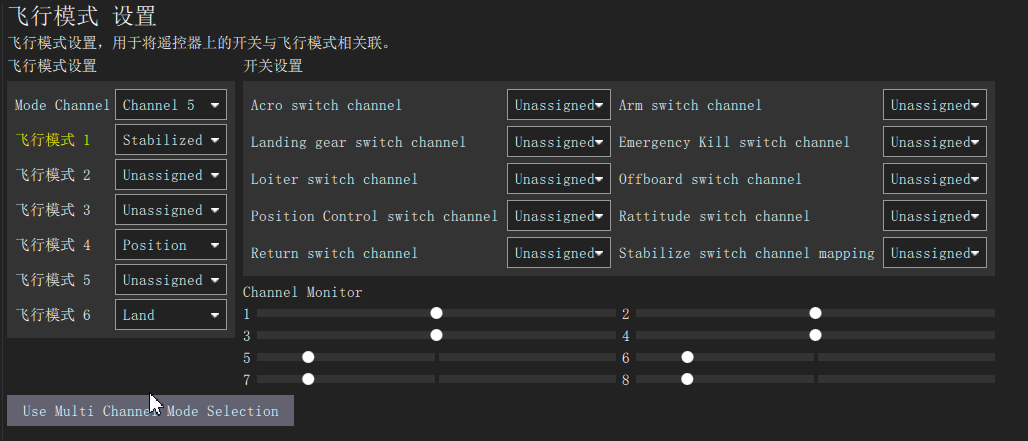
飞行模式设置
-
可以在遥控器上设置通道,一般三挡开关对应飞行模式1、飞行模式4、飞行模式6。如图所示,此时通道5设置的三个模式分别为自稳模式、定点模式、降落模式。
-
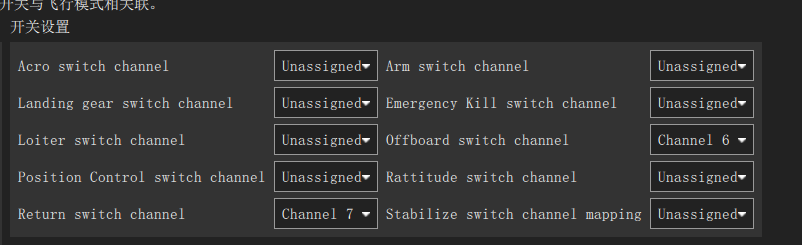
如有需要板载计算机模式和返航模式,也可在开关设置下自行设置。如图所示,设置通道6为offboard模式,通道7为返航模式。
注意!
遥控器设置通道时,无人机须处于断电状态。
演示视频
-
操作视频演示如下:
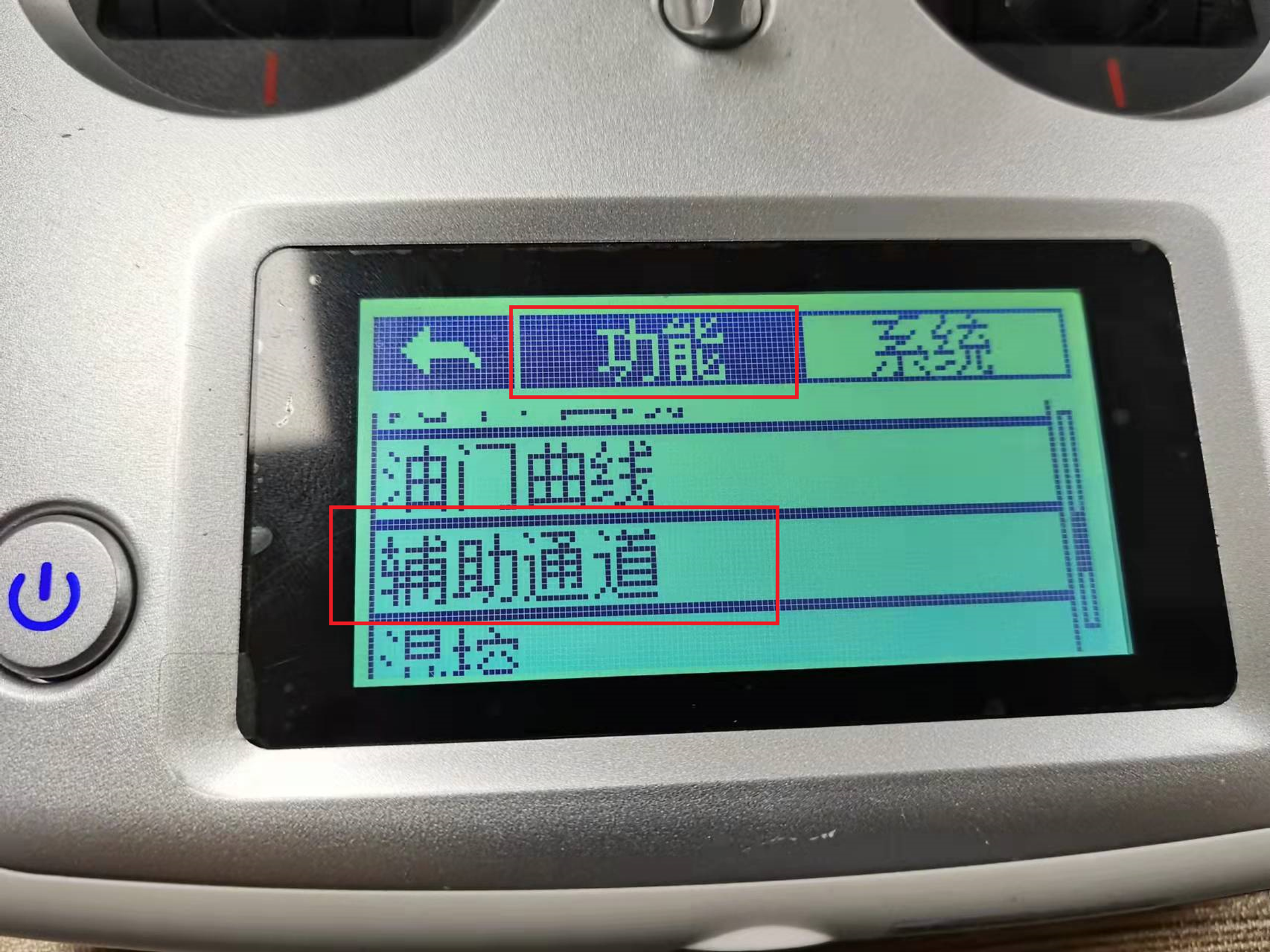
遥控器紧急开关设置
遥控器设置
-
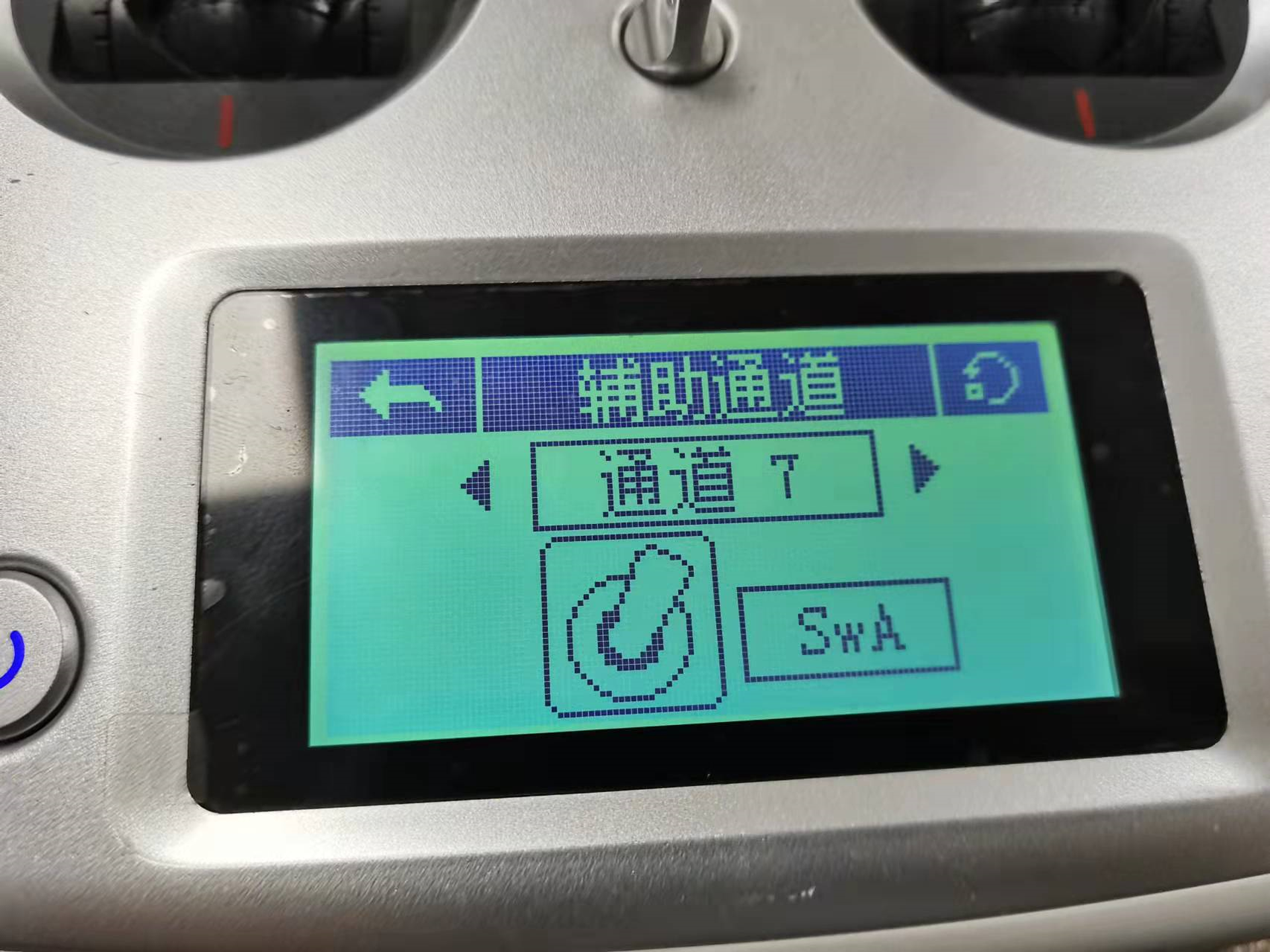
打开FS-I6S遥控器,进入功能设置页面。

-
点击进入辅助通道设置。
-
将7通道开启,并设置为开关SWA,SWA对应的是左上角的两段开关。


QGC地面站软件映射
-
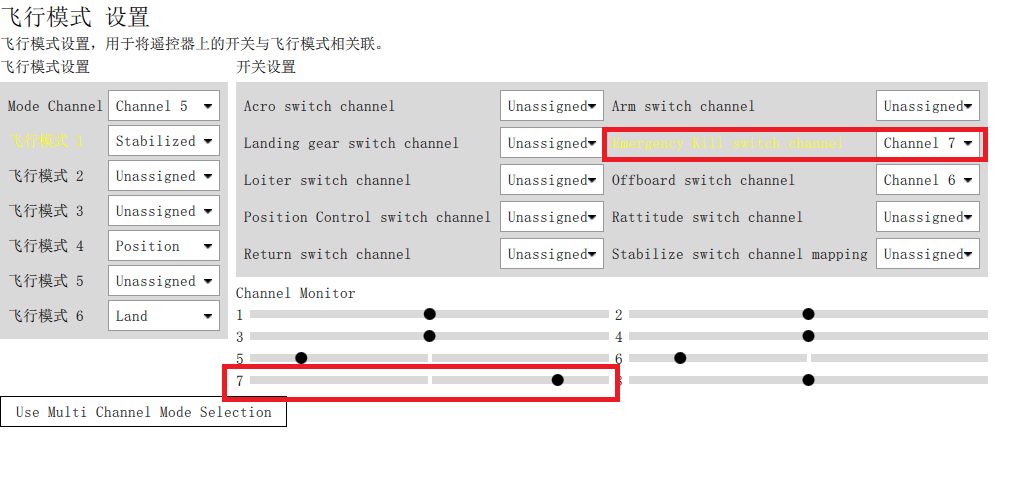
连接上QGC,进入设置界面的飞行模式设置将Emergency Kill switch channel映射为7通道。
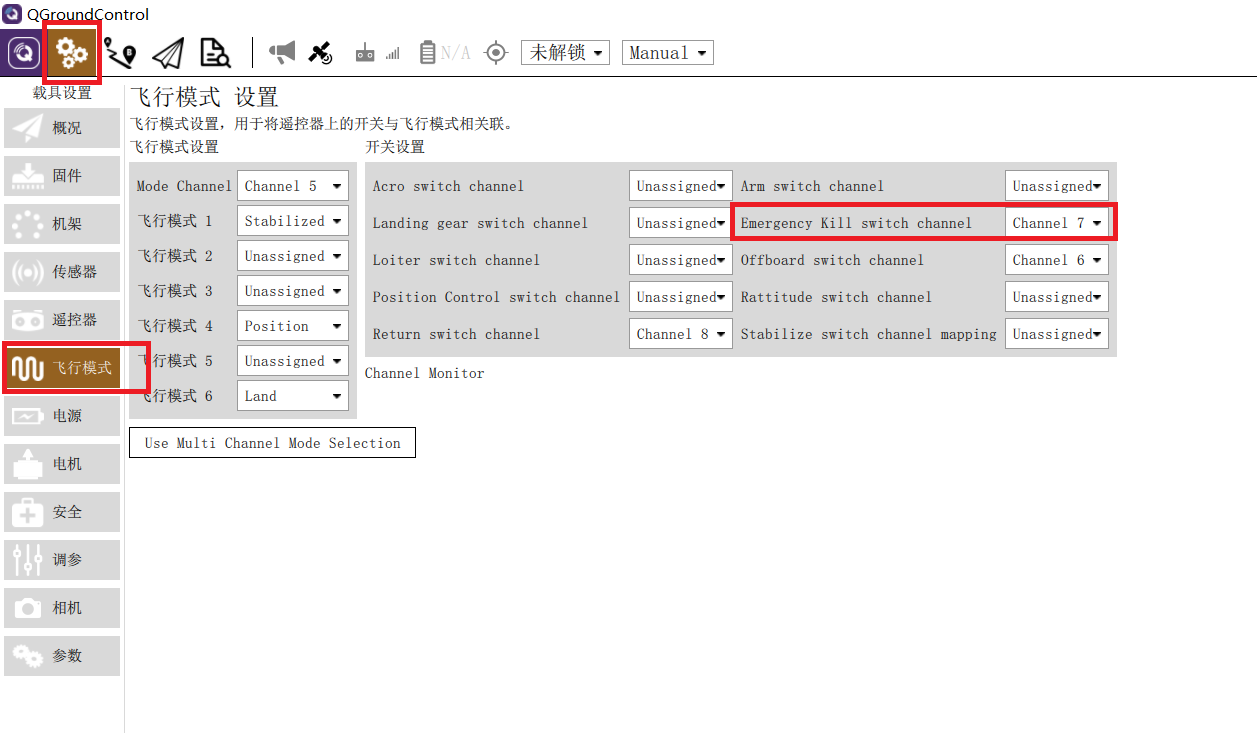
-
拨动遥控器的SWA开关,会有7通道的响应。
急停操作演示及注意事项
-
急停开关是在飞机飞行过程中,进行紧急使用的,在急停开关启用的5s时间内,如果复位急停开关,那么电机又重新恢复旋转,所以在使用急停开关过程中建议至少超过5s时间再去复位急停开关。


-
急停开关启用之后,会qgc提示急停开关已启用,在5s以内,飞机目前仍处于解锁状态,只不过急停开关让电机停止旋转,等待五秒之后,飞机进入未解锁状态。
演示视频
-
操作视频演示如下:
电池校准
-
用BB响(低压报警器)测出飞机实际电压,如下图所示

-
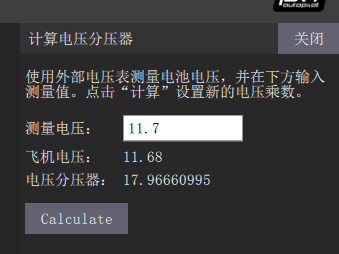
在电源界面下,选择“电压分压器”,点击计算
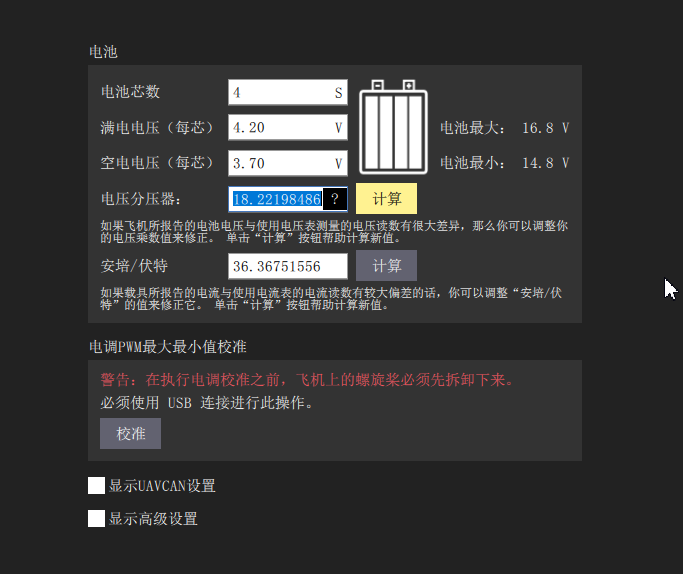
-
如图所示,在测量电压下输入已经测得的实际电压,然后点击“Calculate”。
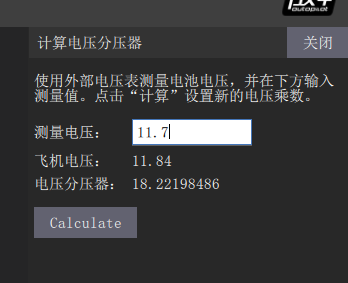
-
等到“测量电压”与“飞机电压”数字接近时,表面电压校准已经完成,此时点击关闭即可。
演示视频
-
操作视频演示如下:
电调校准
注意!
禁止将电池空电电压设置到3.6V以下,防止电池过放造成损坏。
注意!
校准前不允许给飞机上电,把桨叶拆卸下来。
-
在电源设置界面下,点击如箭头所指的“校准”。

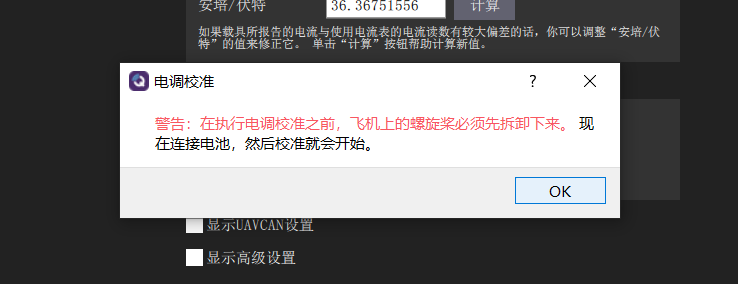
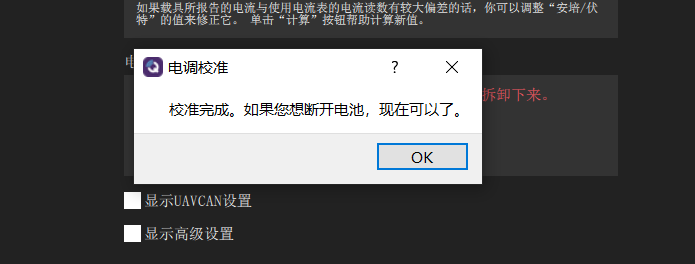
-
给飞机上电,飞机会自动进行电调校准,几秒钟后就会校准完成了。
演示视频
-
操作视频演示如下:
常用的参数设置
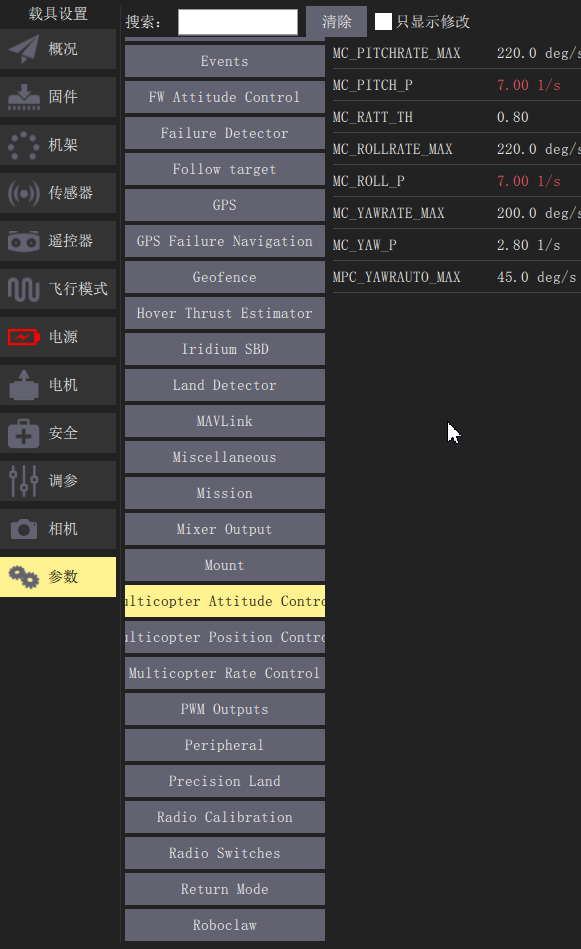
-
在参数设置下面的搜索界面,搜索关键字即可调整参数。
常用参数:
-
aid_mask:位置估计来源选择
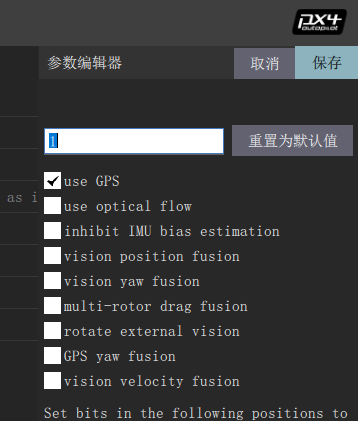
-
hgt_mode:高度估计来源选择
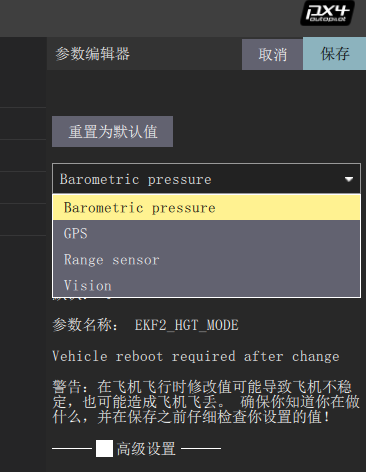
-
Mag_sides:传感器校准面数选择
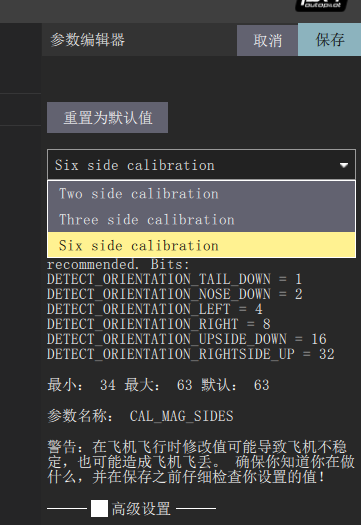
-
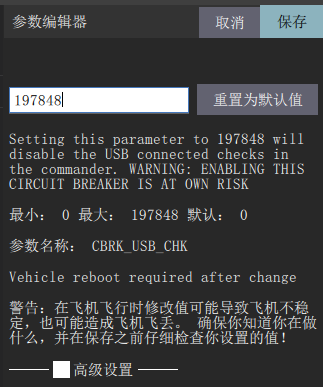
Usb_chk:当用数据线调试飞机时,有时会显示“usb is not safe”,此时搜索“usb_chk”把数值调到197848最大值即可。

-
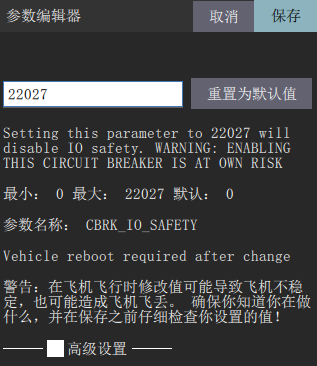
CBRK_I0_Safety:安全开关
当提示无法解锁飞机时,把CBRK_IO_SAFETY数值调到最大值22027,相当于禁用安全开关。

演示视频
-
操作视频演示如下:
PID调参
PID调节图示
-
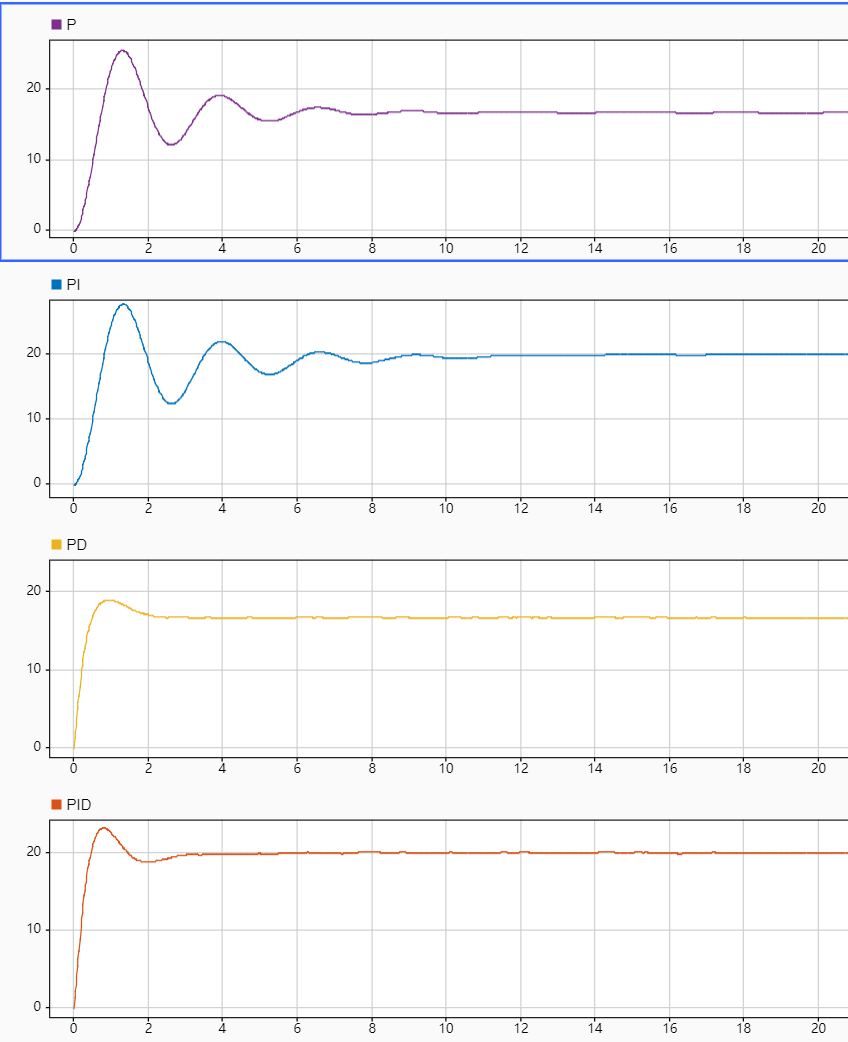
p为比例项,i为积分项、d为微分项。pid简单来说是一种传函,是在执行器机构传函确定好以后,期望值与观测值有误差,不符合期望值,所以使用pid作为一种调节手段使飞机的观测值达到期望值。pid调参可用如下一张图来解释说明。下图中的期望值为20纯比例P作用下在稳定后有静态误差,为了弥补静态误差,因此引入积分项I。PI作用下,虽然弥补了静态误差,但是因为引入了积分项,使得调节过程中峰值增加,调节周期增长,所以也有不足之处。PD作用下,加快了调节时间减小了调节幅度,但是当系统稳定时与输入有较大误差,D项作用过大的话会引起一定的震动。综合以上,PID作用下,调节的又快又好还没有误差,因此PID调节是理想的控制调节策略。
参数调节
-
在调节参数之前,应该了解px4的代码框架,了解位置控制与姿态控制的关系,内环与外环的关系。
-
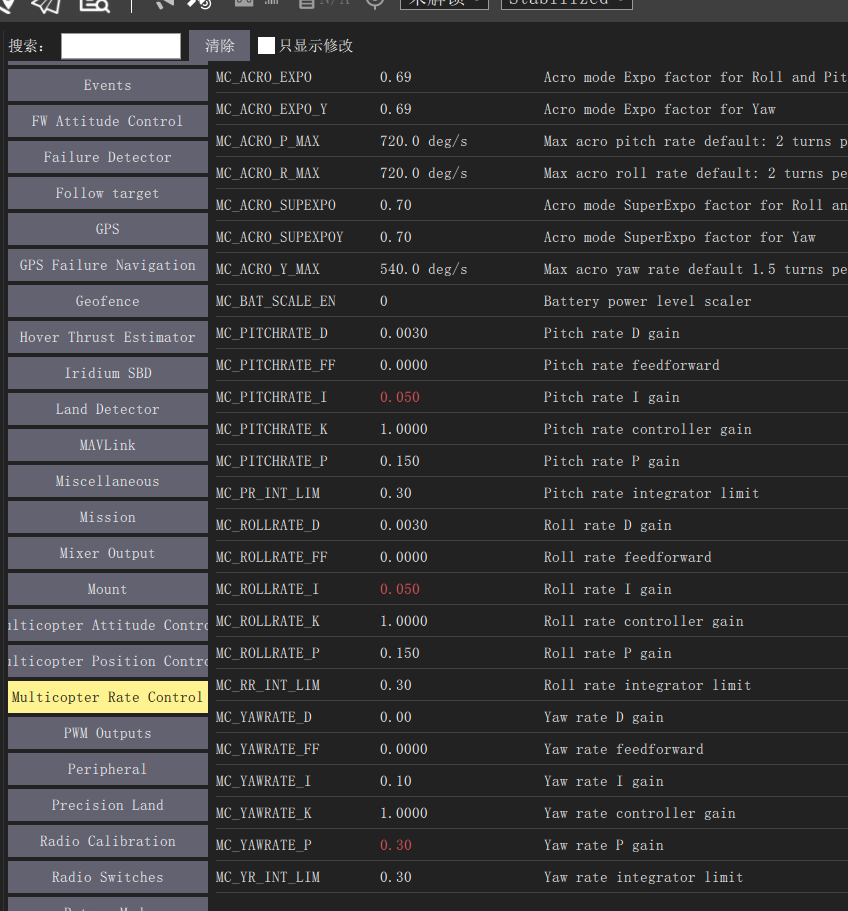
姿态控制的角度环参数
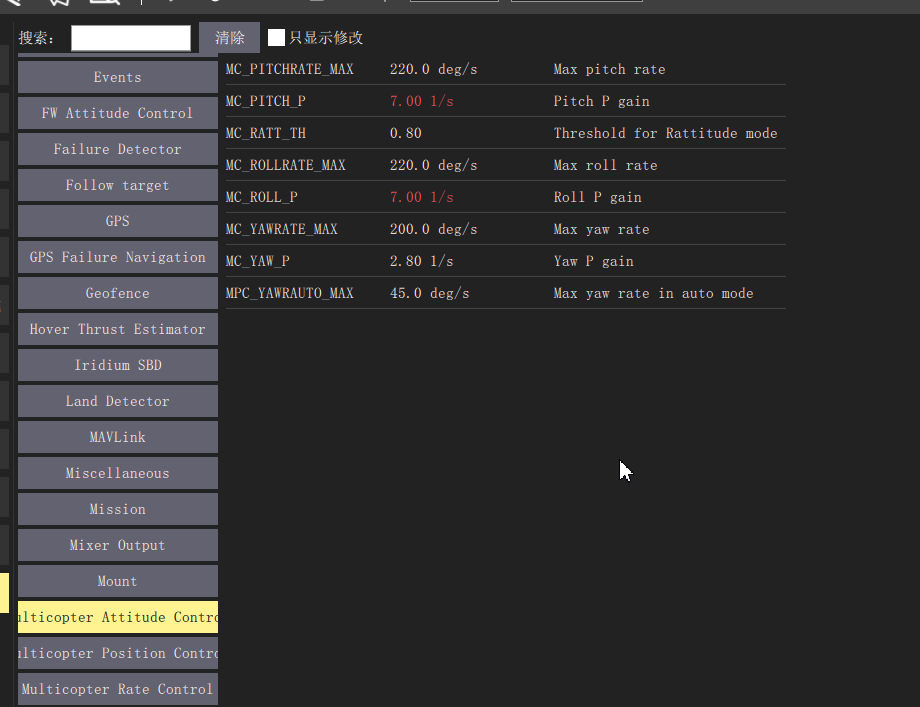
-
姿态控制的角速度环参数
-
位置控制参数
演示视频
-
操作视频演示如下:
演示视频
-
操作视频演示如下:
任务飞行
-
点击如下界面,进入航点规划界面

-
点击“文件”,选择“Survey”

-
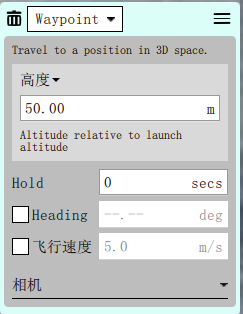
进入航点规划界面,点击“航点”,即可设置若干个航点。

-
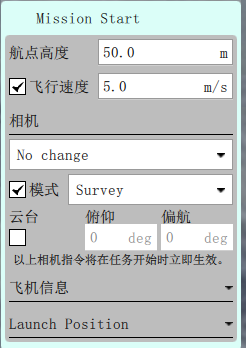
在右侧可以设置“高度”与“速度”。在“Mission Start”上可以统一设置每个航点的高度与速度。
-
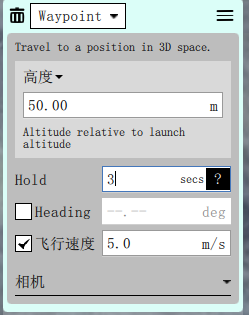
在每个航点上也可以设置高度、速度、与停留时间。如图所示,设置航点高度为50m,速度为5m/s,停留时间为3s。
-
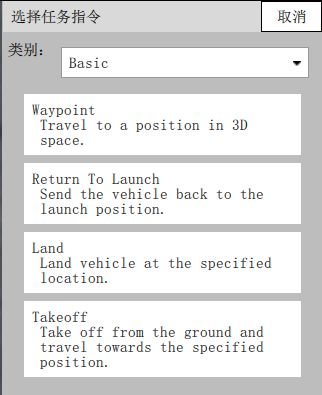
点击航点旁边的“倒三角”,可以设置航点的类型,分别为任务点、返航点、降落点、起飞点。
-
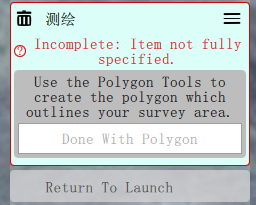
在最后一行,标有“测绘”字样的航点旁边,点击“删除”,删掉最后一个任务点,否则不能上传任务。
-
点击右上角“需要上传”,航点规划就完毕了。
演示视频
-
视频演示如下:
演示视频
-
视频演示如下:
日志导出
打开日志
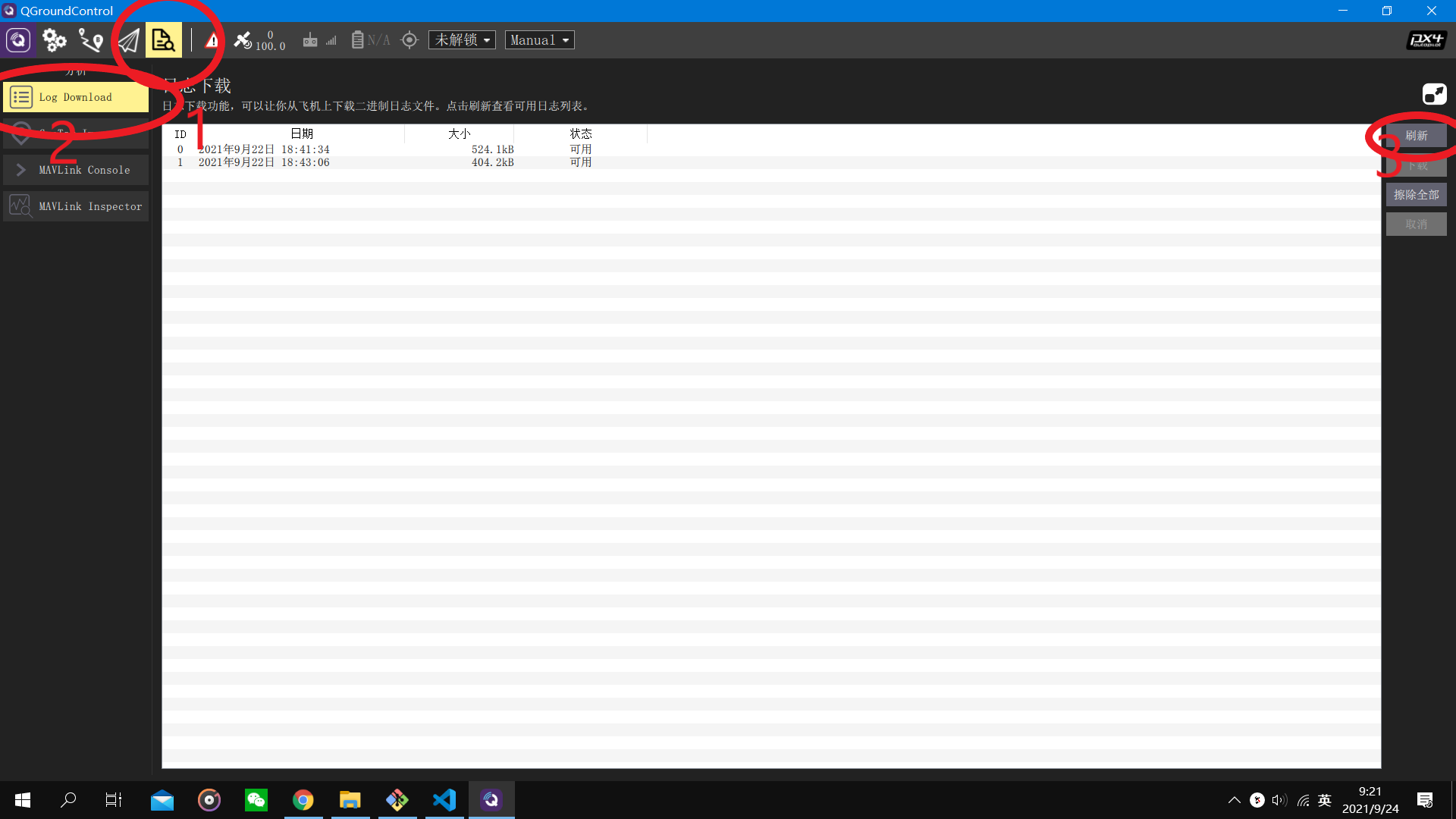
注意!
时间可能与电脑上的时间不同,最下面的日志就是最新的日志,只有解锁后才会记录日志。
点击日志,将想下载的日志选为蓝色,点击下载。
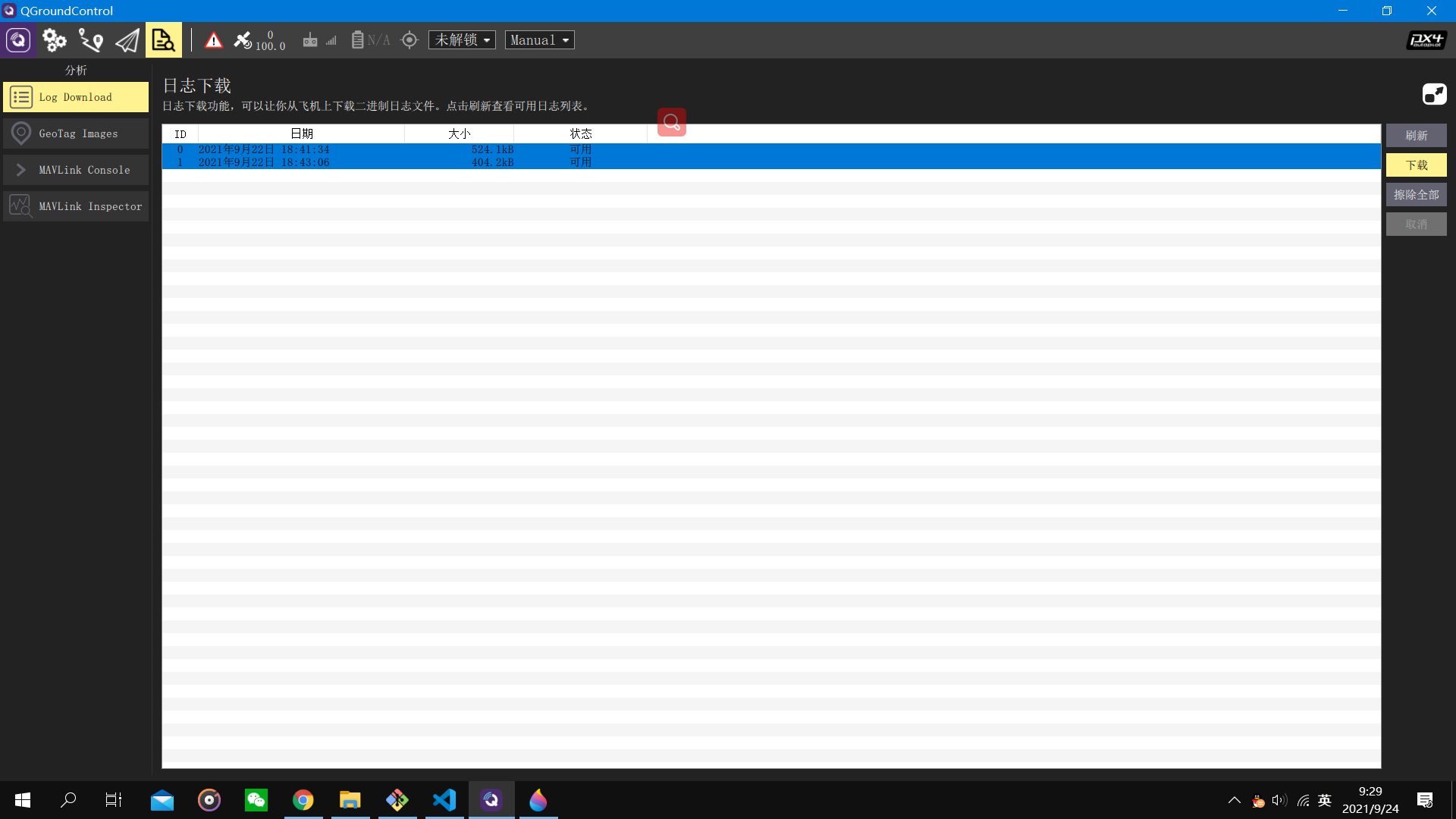
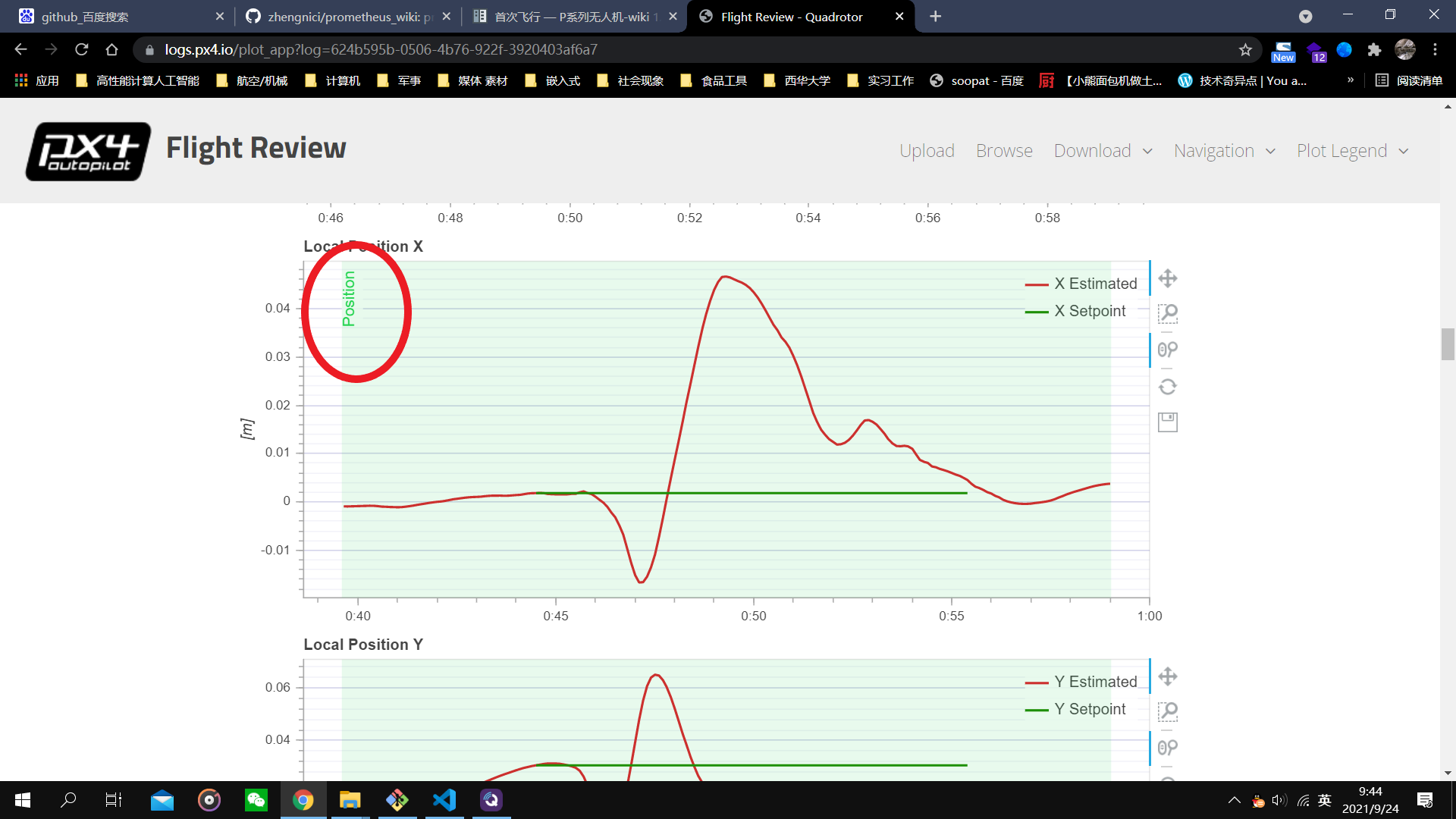
最新的日志后缀为.ulg 可以使用 px4在线分析网站https://logs.px4.io来分析日志不需用特殊工具,多刷新几次就会出来
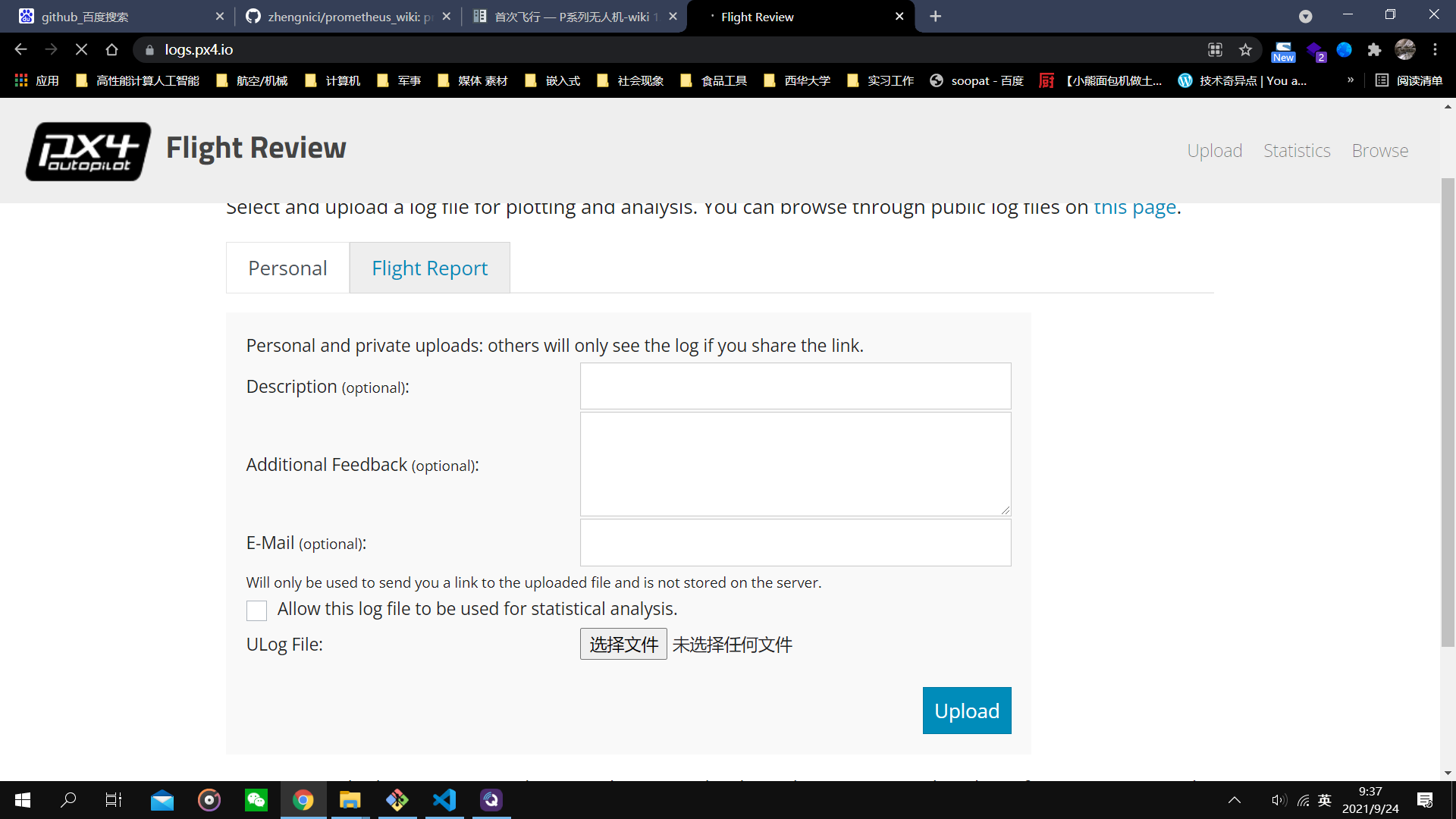
选择文件后点击upload就可以上传到网站分析也可以复制链接分享给分析人员
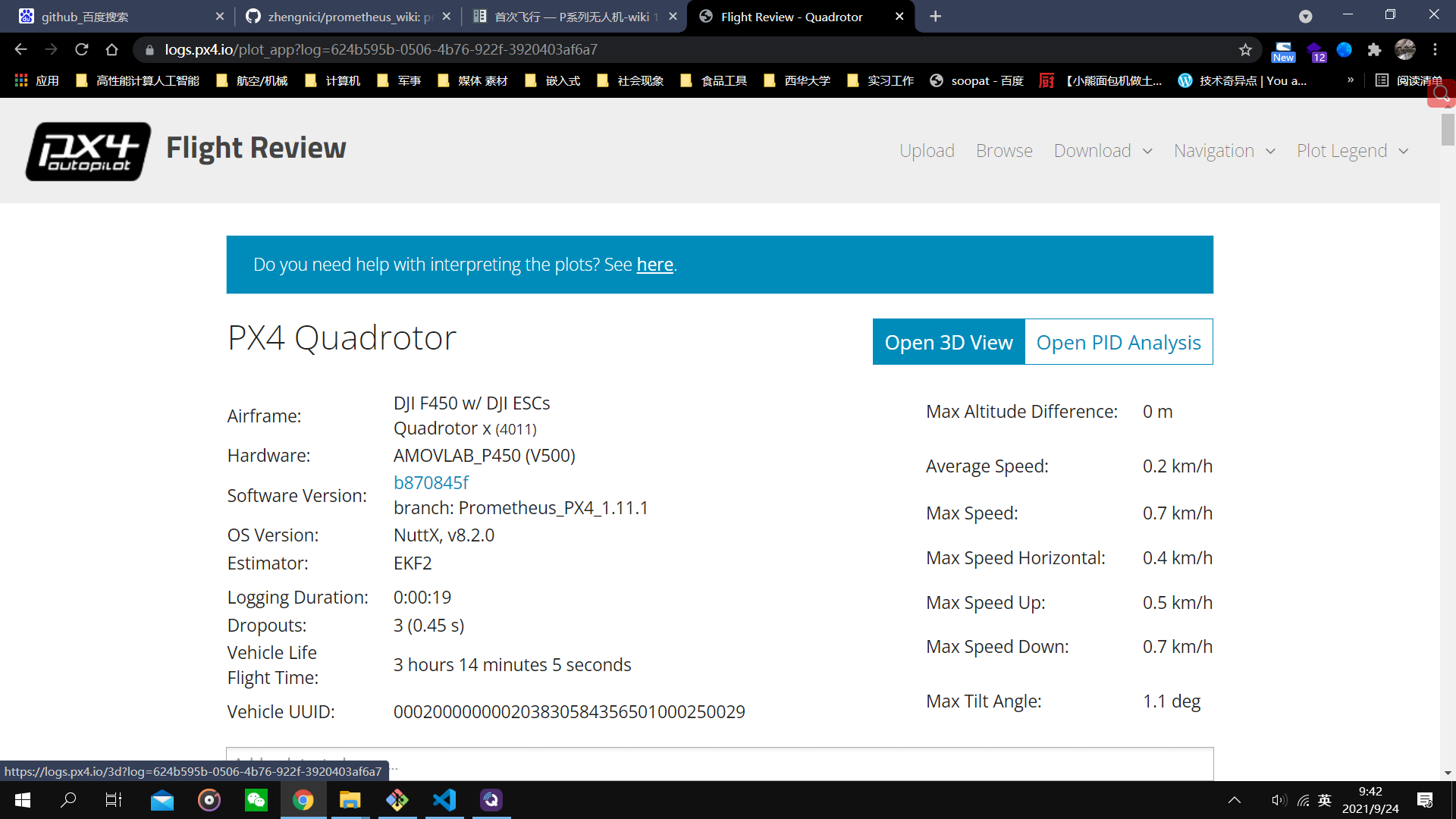
可以分析各项参数与姿态还有对应的模式可以看到现在是定点模式可以如果出现t265掉线的情况可能就会切到定高模式
APM基础
APM简介
-
ArduPilot的“Ardu”部分取自Arduino。最初APM1自动导航板是基于Arduino开发环境的。到现在就不再使用Arduino运行库了。尽管仍然使用稍加修改的Arduino集成开发环境版本,来支持用于基于AVR的APM1与APM2板的ArduPilot。因为现在不仅支持Arduino兼容硬件(如PX4),为表示当前代码的跨平台特性,把“Ardu”前缀从软件项目取消,改为了“APM” 前缀。
由于APM良好的可定制性,通过开源软件Mission Planner,开发者可以配置APM的设置,接受并显示传感器的数据。目前APM飞控已经成为开源飞控成熟的标杆,可支持多旋翼、固定翼、直升机和无人驾驶车等无人设备。针对多旋翼,APM飞控支持各种四、六、八轴产品,并且连接外置GPS传感器以后能够增稳,并完成自主起降、自主航线飞行、回家、定高、定点等丰富的飞行模式。APM能够连接外置的超声波传感器和光流传感器,在室内实现定高和定点飞行。
Mission Planner地面站
-
Mission Planner是一款免费开源、比较成熟稳定的地面站,只有Windows版本。
打开官网,找到“MissionPlanner”选项;
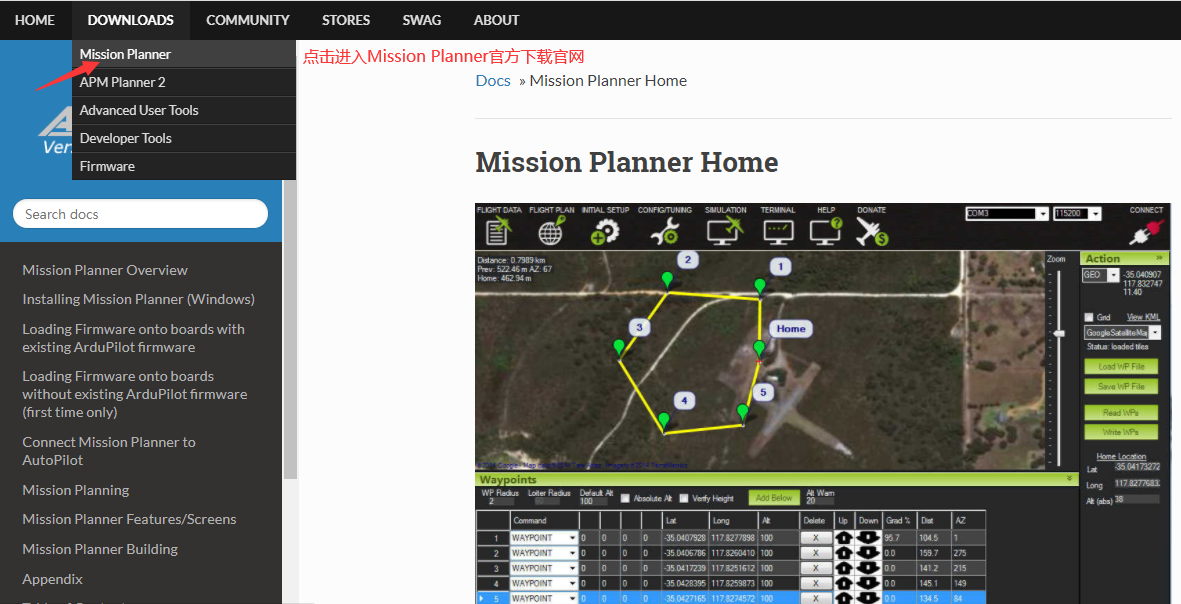
根据自己需要选择相应的安装包;
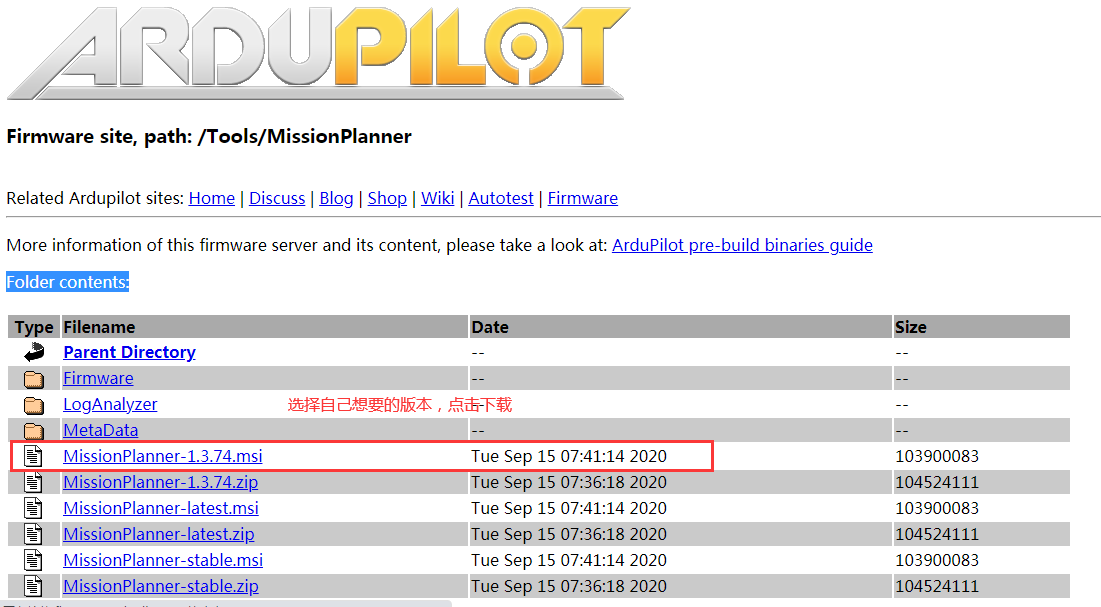
双击下载的.msi文件以运行安装程序;
根据个人情况安装路径,默认的情况下是C盘,自定义完成以后再点击“下一步”;
当安装程序安装一半时会出现“设备驱动程序安装向导”界面。这里需要安装,点击“设备驱动程序安装向导”界面的“下一步”;
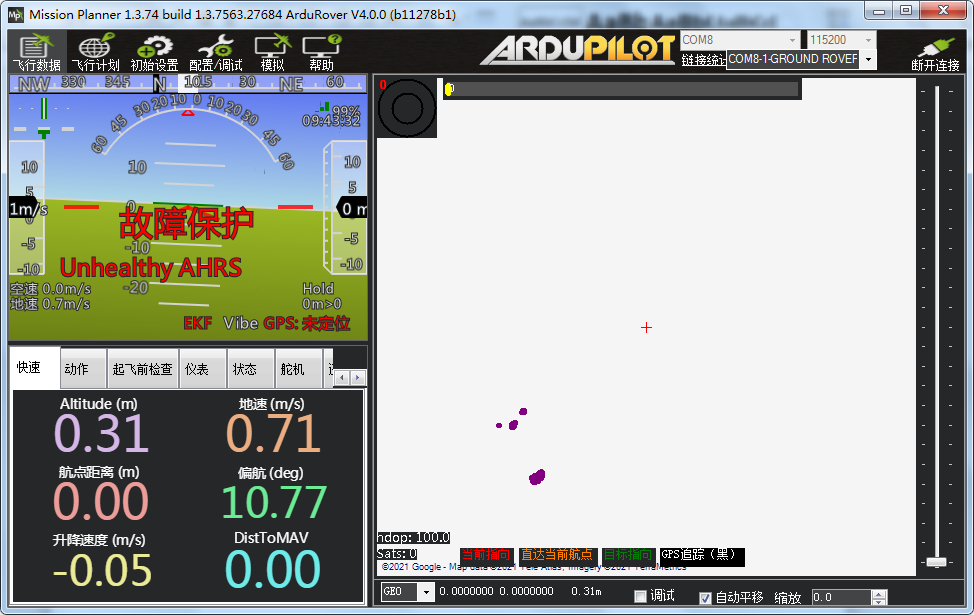
当“设备驱动程序安装向导”安装完成以后,检查“设备驱动程序安装向导”界面里的“驱动程序名”是否全部安装正确。然后点击“完成”,此时Mission Planner地面站安装成功。
地面站连接到飞控
-
要建立连接,您必须首先选择要使用的通信方法/通道,然后设置物理硬件和Windows设备驱动程序。使用USB线连接飞控的USB口。

注意!
Windows上必须存在用于连接硬件的驱动程序,因为这会使您的连接的COM端口和默认数据速率可供Mission Planner使用。在Mission Planner上,使用屏幕右上方的下拉框设置端口和波特率。
提示:
连接USB后,系统会自动为飞控分配一个COM端口号,该端口号将显示在下拉菜单中,还需要设置用于连接的适当的波特率(通常USB连接波特率为115200,无线连接速率为波特率)。设置好端口号和波特率后点击连接,此时说明连接成功
APM基础
APM简介
-
ArduPilot的“Ardu”部分取自Arduino。最初APM1自动导航板是基于Arduino开发环境的。到现在就不再使用Arduino运行库了。尽管仍然使用稍加修改的Arduino集成开发环境版本,来支持用于基于AVR的APM1与APM2板的ArduPilot。因为现在不仅支持Arduino兼容硬件(如PX4),为表示当前代码的跨平台特性,把“Ardu”前缀从软件项目取消,改为了“APM” 前缀。
由于APM良好的可定制性,通过开源软件Mission Planner,开发者可以配置APM的设置,接受并显示传感器的数据。目前APM飞控已经成为开源飞控成熟的标杆,可支持多旋翼、固定翼、直升机和无人驾驶车等无人设备。针对多旋翼,APM飞控支持各种四、六、八轴产品,并且连接外置GPS传感器以后能够增稳,并完成自主起降、自主航线飞行、回家、定高、定点等丰富的飞行模式。APM能够连接外置的超声波传感器和光流传感器,在室内实现定高和定点飞行。
Mission Planner地面站
-
Mission Planner是一款免费开源、比较成熟稳定的地面站,只有Windows版本。
打开官网,找到“MissionPlanner”选项;
根据自己需要选择相应的安装包;
双击下载的.msi文件以运行安装程序;
根据个人情况安装路径,默认的情况下是C盘,自定义完成以后再点击“下一步”;
当安装程序安装一半时会出现“设备驱动程序安装向导”界面。这里需要安装,点击“设备驱动程序安装向导”界面的“下一步”;
当“设备驱动程序安装向导”安装完成以后,检查“设备驱动程序安装向导”界面里的“驱动程序名”是否全部安装正确。然后点击“完成”,此时Mission Planner地面站安装成功。
地面站连接到飞控
-
要建立连接,您必须首先选择要使用的通信方法/通道,然后设置物理硬件和Windows设备驱动程序。使用USB线连接飞控的USB口。
注意!
Windows上必须存在用于连接硬件的驱动程序,因为这会使您的连接的COM端口和默认数据速率可供Mission Planner使用。在Mission Planner上,使用屏幕右上方的下拉框设置端口和波特率。
提示:
连接USB后,系统会自动为飞控分配一个COM端口号,该端口号将显示在下拉菜单中,还需要设置用于连接的适当的波特率(通常USB连接波特率为115200,无线连接速率为波特率)。设置好端口号和波特率后点击连接,此时说明连接成功
基本飞行概念
-
PixHawk是著名飞控厂商3DR推出的新一代独立、开源、高效的飞行控制器,前身为APM飞控,不仅提供了丰富的外设模块和可靠的飞行体验,有能力的爱好者还可在其基础上进行二次开发。第一次使用需要多方查阅资料,摸索前行,根据本人学习和使用过程整理成文,其中大部分内容来自官网和相关网站的资料,希望对想尝试PixHawk的朋友有所帮助。
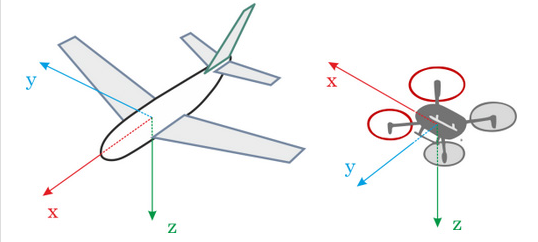
1.1 机头指向和方向
-
以固定翼与四轴飞行器为例,下图是无人机的载体坐标系:
- 载体重心为坐标原点
- 载体前进方向为x轴正方向
- 载体水平姿态时垂直向下为z轴正向
- 载体飞行方向指向右为y轴正向(x,y和z轴满足右手螺旋准则)
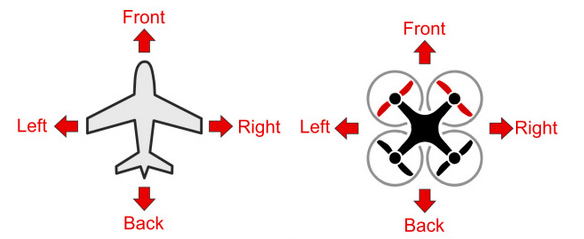
飞行方向示意图(俯视):
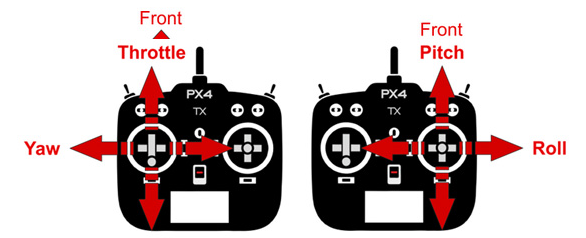
1.2 遥控与基本飞行控制
-
使用左右油门时,油门最低位置如下图:
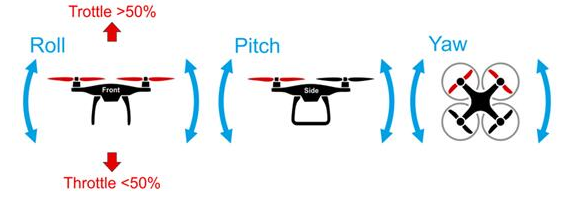
1.3多轴飞行器的飞行姿态角
-
Roll: 横滚角,以飞行前进方向为轴的左右角度变化
-
Pitch: 倾斜角,以飞行前进方向为轴的高低角度变化(抬头、低头)
-
Yaw: 航向角,飞行器机头指向角度的改变
校准
-
当一个全新的固件下载进APM板以后,你首先需要做的是三件事:一是遥控输入校准,二是加速度校准,三是罗盘校准,如果这三件事不做,后续的解锁是不能进行的,MP的姿态界面上也会不断弹出红色提示:PreArm: RC not calibrated(解锁准备:遥控器没有校准)。
将GPS的输出接上飞控的对应的GPS MODULE口,打开地面站,USB连接飞控,选择“连接”,连接成功后进入“初始设置”页面,展开左侧“必要硬件”,准备校准。
注意!
设置COM端口号和波特率,选择计算机新增的端口号,波特率选择115200。
加速度计校准
-
左侧列表“加速度计校准”进入校准界面,按提示放置飞控,首先校准水平,每一步完成后点击绿色“Click When Done”按钮,如果安装最新地面站后界面为中文,按提示完成校准操作即可。

随后校准加速度计,提示如下:
第一个:Place vehicle level and press any key: (请把APM水平放置然后按任意键继续)
第二个:Place vehicle on its LEFT side and press any key: (请把APM左边向上垂直立起)
第三个:Place vehicle on its RIGHT side and press any key:(请把APM右边向上垂直立起)
第四个:Place vehicle nose DOWN and press any key: (请把APM机头向下垂直立起)
第五个:Place vehicle nose UP and press any key: (请把APM机头向上垂直立起)
第六个:Place APM on its BACK and press any key(请把APM背部向上水平放置)
如图校准成功后提示success:

指南针校准
-
先将GPS天线与飞控固定好,确保二者正表面上箭头方向的向指向一致,注意一定要固定好,在后续的旋转过程中二者不能发生偏移,如图所示:

校准步骤如下:
-
1.连接飞控
-
2.初始设置-必要硬件-罗盘
-
3.只勾选第一个,(如需提高精度也可添加外置罗盘)准备好后点击开始现场校准

-
4.进行校准
方法:每个面绕其中心轴旋转360度,校准过程中注意千万不要碰到USB线,以免断开飞控。
-
5.校准完后,界面会有新的三轴的值,绿色值表示正常。
-
6.注意事项
(1)在室内会做校正罗盘时候,室内设备会对地磁产生干扰影响罗盘精度,如需提高精度建议在室外做一次。
(2)APM内置的罗盘很容易受到飞控内电子元件干扰,还有电池、接收机等其它的干扰,如果用外置的罗盘的话精度会增加不少。
(3)在飞行器重新布线、升级固件、添加或者换设备时候,建议重新做一次校正罗盘。
如果你刷了1.3.5以上版本的固件,还加了外置罗盘,可能会遇到一个问题:就是外置罗盘一直没法校准,进度条一直在动,没有提示校准成功。那这个问题在哪里呢?
没校准之前,GPS所在的磁场环境可能和飞控内置罗盘磁场有所不同导致存在偏差。导致校准GPS罗盘没有正确触碰到白点,而恰恰最新版的地面站去掉了显示白点的界面,有时候校准存在一些不方便!
小技巧:
最新版本的固件对罗盘校准要求越来越高。如果你刷了最新版本固件,还用了最新地面站,如果你校准时,飞控和GPS没有固定一起,或者飞控和GPS的箭头不一致,基本上校准不通过。所以,新版本固件校准时,一定要确保飞控和GPS箭头一致,校准移动时,要同步同时移动飞控和GPS,不可以单独。-
刷了最新版本固件,要用最新的地面站,否则可能校准过程会卡在99%就不动了。
-
GPS要固定好,GPS用支架撑起来,飞控的箭头和GPS的箭头保持(这点非常重要,否则基本通不过)。校准时,飞控和GPS一起同步移动(不同步移动,基本校准不过)。
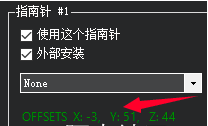
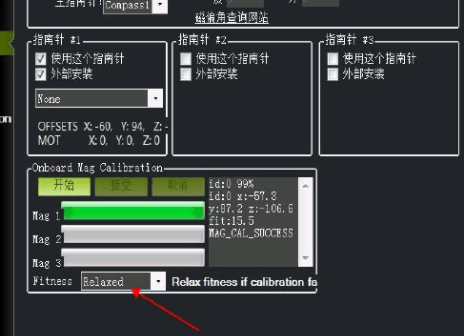
提示:
如果GPS固定好,箭头和飞控箭头一致,安装到机架上,很容易通过校准。箭头一致后,用手固定好GPS和飞控,移动时,GPS和飞控同步同时移动。- 地面站的Fitness改为Relaxed 或者default,重新校准罗盘,就很容易校准。
-
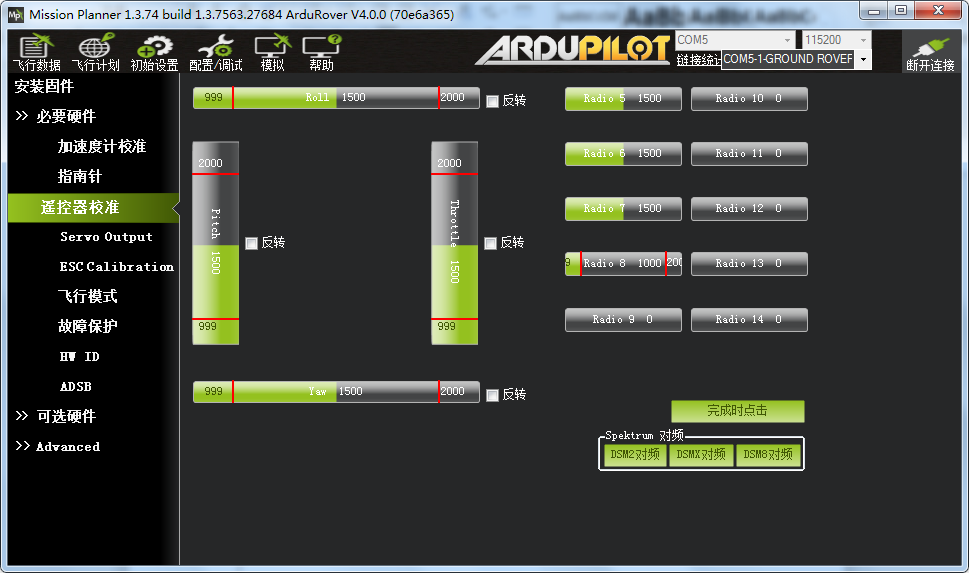
遥控器校准
-
GPS校准后,断电后按照规范接上FS-1A6B接收机连接飞控 PPM RC端口进行遥控器校准。
警告!
接收机接错,飞控极有烧毁的可能! -
1.遥控器通道配置
通道1:roll(横滚)
通道2:pitch(俯仰)
通道3:throttle(油门)
通道4:yaw(偏航)
通道5:飞行模式(辅助通道,具体可见遥控器辅助通道及失控保护)
美国手:左手油门(遥控器系统设置中的摇杆模式为2)
日本手:右手油门

-
2.开始遥控器校准(以美国手为例)
将遥控器通道按钮都拨至最上方,同时按下遥控器两边的开机按钮。
(1)连接地面站(飞控自检完成后)。
(2)点击初始设置-可选硬件-遥控器校准。
(3)打开遥控器,确认已接上接收机。
(4)来回拨动遥控器的开关,使每个档位分别到达其最大和最小,MP遥控通道上红色线条的显示,让地面站记录其最大行程和最小行程。
注意!
这里要保证油门上推,代表油门的绿色条也向上,roll和Yaw也是,pitch相反,如果不是,可在遥控器的舵机相位中修改正反相。(5)点击完成,会出现各通道值。
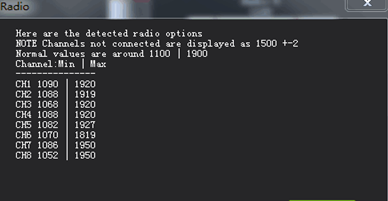
(6)观测遥控器行程,最小值小于1100,最大值大于1900,则遥控器正常。
注意!
遥控器左右摇杆控制4个柱面(正确的方向在图下文字中做出了说明)只有升降舵为反向。正向:表示上下左右和摇杆操作一致,例如,向左打杆,输出变小,向上打杆,输出变大反向:表示上下左右和摇杆操作相反,例如,向左打杆,输出变大,向上打杆,输出变小。
油门推到顶/油门降到底,正向为正确(如果油门推上去输出反而下降,则需要在遥控器设置中将油门反向)

左摇杆打到最左/左摇杆打到最右(方向、航向、偏航:机头指向,正向为正确),右摇杆打到最 左侧/右摇杆打到最右侧(副翼-横滚,正向为正确)
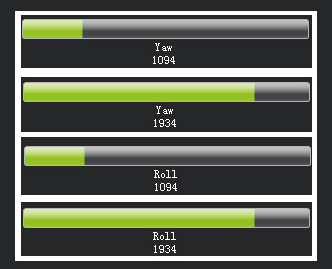
右摇杆推到顶/右摇杆打到底(升降:右摇杆上下, 反向为正确)
所有摇杆均在1094-1934之间变化,满足要求。
点击“校准”,将遥控器左右摇杆重复打到最值,即左右摇杆在最大值上不停转圈,得到校准数据
如下:

操作完成后点击“完成时点击”按钮,弹出完成提示对话框点击“OK”后将弹出校准数据,说明指南针校准成功:
飞行模式设置
飞行模式详解
-
- 稳定模式(Stabilize模式)是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用该模式。在此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
-
- 比率控制模式(Acro模式)这个是非稳定模式,这时飞控将完全依托遥控器遥控控制,新手慎用。
-
- 定高模式(ALT_HOLD模式)是使用自动油门,试图保持目前的高度的稳定模式。定高模式时依然可以通过提高或者降低油门控制,但是中间会有一个油门死区,油门动作幅度超过这个死区时,飞行器才会响应你的升降动作,当进入任何带有自动高度控制的模式,你目前的油门将被用来作为调整油门保持高度的基准。在进入高度控制前确保你在悬停在一个稳定的高度。飞行器将随着时间补偿不良的数值。只要它不下跌过快,就没有什么问题。离开高度保持模式时请务必小心,油门位置将成为新的油门,如果不是在飞行器的中性悬停位置,将会导致飞行器迅速上升或者下跌。在这种模式下你不能降落及关闭马达,因为现在是油门摇杆控制高度,而非马达。请切换到稳定模式,才可以降落和关闭马达。
-
- 悬停模式(Loiter模式)是GPS定点+气压定高模式。应该在起飞前先让GPS顶点,避免在空中突然定位发生问题。其他方面跟定高模式基本相同,只是在水平方向上由GPS进行定位。
-
- 简单模式(Simple Mode模式) 相当于一个无头模式,每个飞行模式的旁边都有一个SimpleMode复选框可以勾选。勾选简单模式后,飞机将解锁起飞前的机头指向恒定作为遥控器前行摇杆的指向,这种模式下无需担心飞行器的姿态,新手非常有用。
-
- 自动模式(AUTO模式)下,飞行器将按照预先设置好的任务规划控制它的飞行,由于任务规划依赖GPS的定位信息,所以在解锁起飞前,必须确保GPS已经完成定位(APM板上蓝色LED灯常量)切换到自动模式有两种情况:如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式是误启动发生危险,所以需要先手动解锁并手动推油门起飞。起飞后飞行器会参考你最近一次ALT HOLD定高的油门值作为油门基准,当爬升到任务规划的第一个目标高度后,开始执行任务规划飞向目标;如果是空中切换到自动模式,飞行器首先会爬升到第一目标的高度然后开始执行任务。
-
- 返航模式(RTL模式)需要GPS定位。GPS在每次解锁前的定位点,就是当前的“家”的位置;GPS如果在起飞前没有定位,在空中首次定位的那个点,就会成为“家”。进入返航模式后,飞行器会升高到15米,或者如果已经高于15米,就会保持当前高度,然后回“家”。还可以设置高级参数选择到“家”后是否自主降落,和悬停多少秒之后自动降落。
-
- 绕圈模式(Circle模式)当切入绕圈模式时,飞行器会以当前位置为圆心绕圈飞行。而且此时机头会不受遥控器方向舵的控制,始终指向圆心。如果遥控器给出横滚和俯仰方向上的指令,将会移动圆心。与定高模式相同,可以通过油门来调整飞行器高度,但是不能降落。圆的半径可以通过高级参数设置调整。
-
- 指导飞行(Guided模式)需要地面站软件和飞行器之间通讯。连接后,在任务规划器MissionPlanner软件地图界面上,在地图上任意位置点鼠标右键,选弹出菜单中的“Fly to here”(飞到这里),软件会让你输入一个高度,然后飞行器会飞到指定位置和高度并保持悬停。
-
- 跟随模式(FollowMe模式)基本原理时:操作者手中的笔记本电脑带有GPS,此GPS会将位置信息通过地面站和数传电台随时发给飞行器,飞行器实际执行的时“飞到这里(Fly to here)”的指令。其结果就是飞行器跟随操作者移动。
飞行模式设置
-
在飞行模式选项栏查看飞行模式设置是否正常:
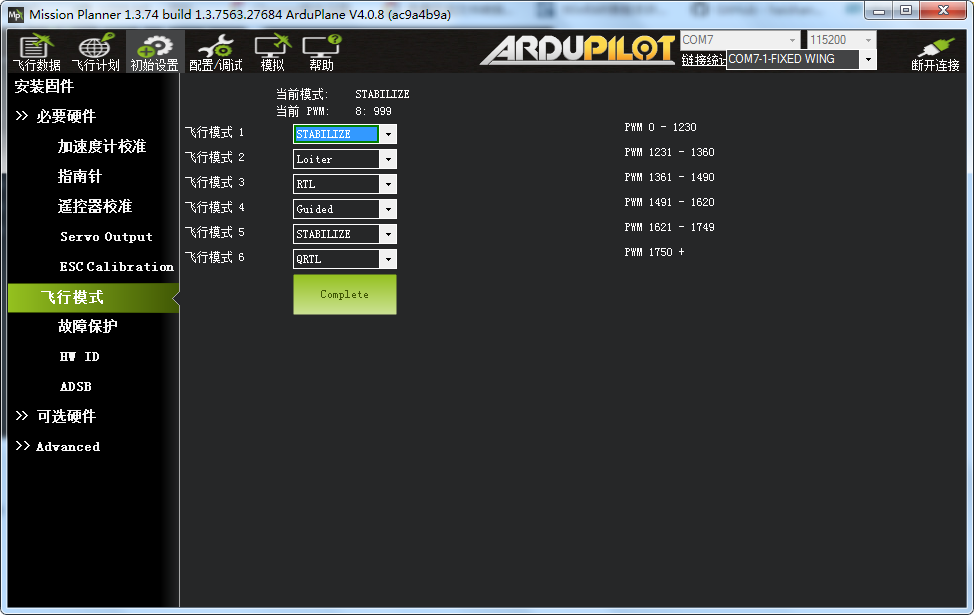
第6通道摇杆在最上位时,拨动第5通道摇杆对应的飞行模式是第5、2、1。
第6通道摇杆在中位时,拨动第5通道摇杆对应的飞行模式是第6、4、3。
根据自己的需要选择需要飞行模式后保存即可。
常见问题处理
-
遇到问题欢迎到阿木社区进行提问
阿木社区网址:https://bbs.amovlab.com/forum.php?mod=forumdisplay&fid=55
-
Q:使用遥控器对无人机进行解锁,但无法解锁。
A:通过地面站连接无人机飞控,观察地面站提示的信息,通常情况下都会提示不能解锁的原因,大部分情况下是需要对传感器进行校准,同时也要注意地面站上显示的飞行模式是什么,如果对提示信息不清楚的可以百度或者在阿木社区进行提问。
-
Q:无人机飞控驱动自启动失败
A:重启无人机或者通过NoMachine远程连接到该无人机,手动启动无人机飞控驱动,命令行如下:
roslaunch formation px4_uav*.launch,其中*为该无人机的集群编号。 -
Q:无人机无法切入定点模式
A:无法切入定点模式,很大的可能性是因为定位数据来源存在问题,将无人机拿起向本地坐标系的X轴,Y轴,Z轴进行移动,观察数据是否正常,如果数据异常说明定位数据来源存在问题,请检查相关操作是否正确,如果无法排查以及处理,请在阿木社区进行提问。
-
Q:输入相应指令,无人机集群操作却没有正常运行
A:确认是否按照操作流程来操作,检查操作流程是否正常,对操作细节不清楚的,建议先从仿真开始接触,先在仿真情况下熟悉操作流程。如果操作流程正常,无人机集群飞行异常,请从地面站,ROS终端窗口等交互界面中查看是否有异常信息报出,根据异常信息解决相关问题,不能解决,请自行百度或者在阿木社区进行提问。
常见问题处理
-
遇到问题欢迎到阿木社区进行提问
阿木社区网址:https://bbs.amovlab.com/forum.php?mod=forumdisplay&fid=55
-
Q:使用遥控器对无人机进行解锁,但无法解锁。
A:通过地面站连接无人机飞控,观察地面站提示的信息,通常情况下都会提示不能解锁的原因,大部分情况下是需要对传感器进行校准,同时也要注意地面站上显示的飞行模式是什么,如果对提示信息不清楚的可以百度或者在阿木社区进行提问。
-
Q:无人机飞控驱动自启动失败
A:重启无人机或者通过NoMachine远程连接到该无人机,手动启动无人机飞控驱动,命令行如下:
roslaunch formation px4_uav*.launch,其中*为该无人机的集群编号。 -
Q:无人机无法切入定点模式
A:无法切入定点模式,很大的可能性是因为定位数据来源存在问题,将无人机拿起向本地坐标系的X轴,Y轴,Z轴进行移动,观察数据是否正常,如果数据异常说明定位数据来源存在问题,请检查相关操作是否正确,如果无法排查以及处理,请在阿木社区进行提问。
-
Q:输入相应指令,无人机集群操作却没有正常运行
A:确认是否按照操作流程来操作,检查操作流程是否正常,对操作细节不清楚的,建议先从仿真开始接触,先在仿真情况下熟悉操作流程。如果操作流程正常,无人机集群飞行异常,请从地面站,ROS终端窗口等交互界面中查看是否有异常信息报出,根据异常信息解决相关问题,不能解决,请自行百度或者在阿木社区进行提问。