校准
-
当一个全新的固件下载进APM板以后,你首先需要做的是三件事:一是遥控输入校准,二是加速度校准,三是罗盘校准,如果这三件事不做,后续的解锁是不能进行的,MP的姿态界面上也会不断弹出红色提示:PreArm: RC not calibrated(解锁准备:遥控器没有校准)。
将GPS的输出接上飞控的对应的GPS MODULE口,打开地面站,USB连接飞控,选择“连接”,连接成功后进入“初始设置”页面,展开左侧“必要硬件”,准备校准。
注意!
设置COM端口号和波特率,选择计算机新增的端口号,波特率选择115200。
加速度计校准
-
左侧列表“加速度计校准”进入校准界面,按提示放置飞控,首先校准水平,每一步完成后点击绿色“Click When Done”按钮,如果安装最新地面站后界面为中文,按提示完成校准操作即可。

随后校准加速度计,提示如下:
第一个:Place vehicle level and press any key: (请把APM水平放置然后按任意键继续)
第二个:Place vehicle on its LEFT side and press any key: (请把APM左边向上垂直立起)
第三个:Place vehicle on its RIGHT side and press any key:(请把APM右边向上垂直立起)
第四个:Place vehicle nose DOWN and press any key: (请把APM机头向下垂直立起)
第五个:Place vehicle nose UP and press any key: (请把APM机头向上垂直立起)
第六个:Place APM on its BACK and press any key(请把APM背部向上水平放置)
如图校准成功后提示success:

指南针校准
-
先将GPS天线与飞控固定好,确保二者正表面上箭头方向的向指向一致,注意一定要固定好,在后续的旋转过程中二者不能发生偏移,如图所示:

校准步骤如下:
-
1.连接飞控
-
2.初始设置-必要硬件-罗盘
-
3.只勾选第一个,(如需提高精度也可添加外置罗盘)准备好后点击开始现场校准

-
4.进行校准
方法:每个面绕其中心轴旋转360度,校准过程中注意千万不要碰到USB线,以免断开飞控。
-
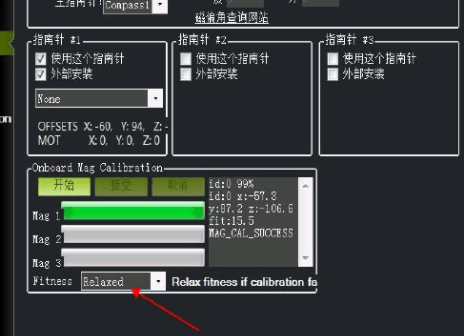
5.校准完后,界面会有新的三轴的值,绿色值表示正常。
-
6.注意事项
(1)在室内会做校正罗盘时候,室内设备会对地磁产生干扰影响罗盘精度,如需提高精度建议在室外做一次。
(2)APM内置的罗盘很容易受到飞控内电子元件干扰,还有电池、接收机等其它的干扰,如果用外置的罗盘的话精度会增加不少。
(3)在飞行器重新布线、升级固件、添加或者换设备时候,建议重新做一次校正罗盘。
如果你刷了1.3.5以上版本的固件,还加了外置罗盘,可能会遇到一个问题:就是外置罗盘一直没法校准,进度条一直在动,没有提示校准成功。那这个问题在哪里呢?
没校准之前,GPS所在的磁场环境可能和飞控内置罗盘磁场有所不同导致存在偏差。导致校准GPS罗盘没有正确触碰到白点,而恰恰最新版的地面站去掉了显示白点的界面,有时候校准存在一些不方便!
小技巧:
最新版本的固件对罗盘校准要求越来越高。如果你刷了最新版本固件,还用了最新地面站,如果你校准时,飞控和GPS没有固定一起,或者飞控和GPS的箭头不一致,基本上校准不通过。所以,新版本固件校准时,一定要确保飞控和GPS箭头一致,校准移动时,要同步同时移动飞控和GPS,不可以单独。-
刷了最新版本固件,要用最新的地面站,否则可能校准过程会卡在99%就不动了。
-
GPS要固定好,GPS用支架撑起来,飞控的箭头和GPS的箭头保持(这点非常重要,否则基本通不过)。校准时,飞控和GPS一起同步移动(不同步移动,基本校准不过)。
提示:
如果GPS固定好,箭头和飞控箭头一致,安装到机架上,很容易通过校准。箭头一致后,用手固定好GPS和飞控,移动时,GPS和飞控同步同时移动。- 地面站的Fitness改为Relaxed 或者default,重新校准罗盘,就很容易校准。
-
遥控器校准
-
GPS校准后,断电后按照规范接上FS-1A6B接收机连接飞控 PPM RC端口进行遥控器校准。
警告!
接收机接错,飞控极有烧毁的可能! -
1.遥控器通道配置
通道1:roll(横滚)
通道2:pitch(俯仰)
通道3:throttle(油门)
通道4:yaw(偏航)
通道5:飞行模式(辅助通道,具体可见遥控器辅助通道及失控保护)
美国手:左手油门(遥控器系统设置中的摇杆模式为2)
日本手:右手油门

-
2.开始遥控器校准(以美国手为例)
将遥控器通道按钮都拨至最上方,同时按下遥控器两边的开机按钮。
(1)连接地面站(飞控自检完成后)。
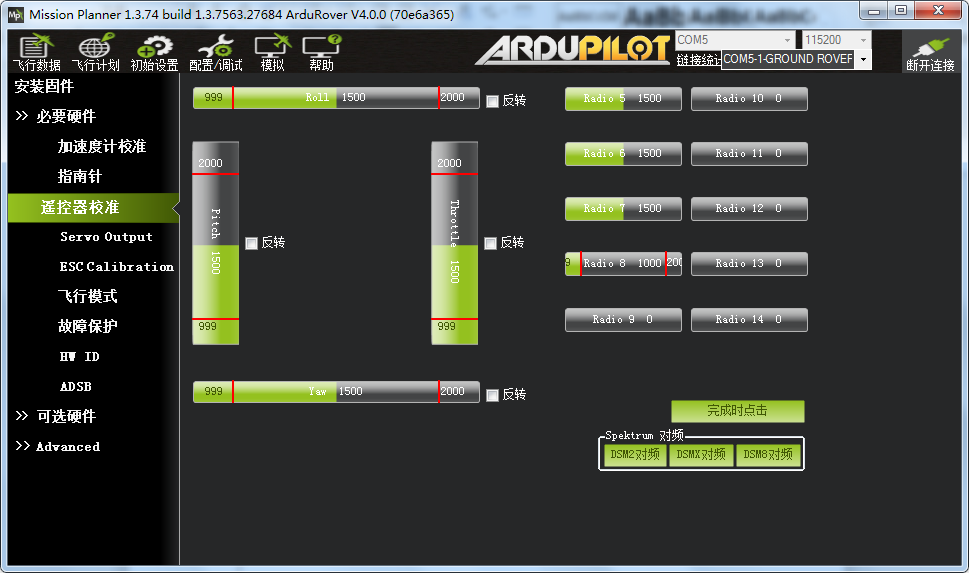
(2)点击初始设置-可选硬件-遥控器校准。
(3)打开遥控器,确认已接上接收机。
(4)来回拨动遥控器的开关,使每个档位分别到达其最大和最小,MP遥控通道上红色线条的显示,让地面站记录其最大行程和最小行程。
注意!
这里要保证油门上推,代表油门的绿色条也向上,roll和Yaw也是,pitch相反,如果不是,可在遥控器的舵机相位中修改正反相。(5)点击完成,会出现各通道值。
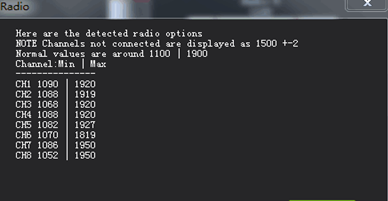
(6)观测遥控器行程,最小值小于1100,最大值大于1900,则遥控器正常。
注意!
遥控器左右摇杆控制4个柱面(正确的方向在图下文字中做出了说明)只有升降舵为反向。正向:表示上下左右和摇杆操作一致,例如,向左打杆,输出变小,向上打杆,输出变大反向:表示上下左右和摇杆操作相反,例如,向左打杆,输出变大,向上打杆,输出变小。
油门推到顶/油门降到底,正向为正确(如果油门推上去输出反而下降,则需要在遥控器设置中将油门反向)

左摇杆打到最左/左摇杆打到最右(方向、航向、偏航:机头指向,正向为正确),右摇杆打到最 左侧/右摇杆打到最右侧(副翼-横滚,正向为正确)
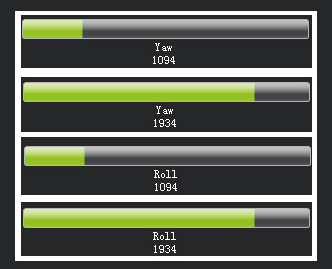
右摇杆推到顶/右摇杆打到底(升降:右摇杆上下, 反向为正确)
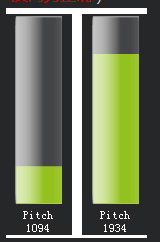
所有摇杆均在1094-1934之间变化,满足要求。
点击“校准”,将遥控器左右摇杆重复打到最值,即左右摇杆在最大值上不停转圈,得到校准数据
如下:

操作完成后点击“完成时点击”按钮,弹出完成提示对话框点击“OK”后将弹出校准数据,说明指南针校准成功: