技术参数
1. 特征
- P230基于PX4 Pixhawk6C开源飞控架构,通过自主设计的走线设计完成了高性能旋翼系统,使用者可轻易实现室内的飞行控制;同时搭载Nvidia Jeston XavierNX 机载计算机,内置ROS环境下的无人机控制程序,可一键启动定点模式和视觉避障功能。除此之外,我们还部署了港科大的VINS_FUSION 算法,可以取代T265用作视觉定位。但是考虑到每个人的机器差异,我们只部署了环境以及数据链路的打通,可以在P230上进行二次SLAM算法开发。
2. 规格
-
作为Prometheus系列的第四代无人机平台,P230采用了轻量化碳管机架和环外保护架的设计。在进一步压缩重量的同时,提高了传感器的使用率,提高了续航时间。

-
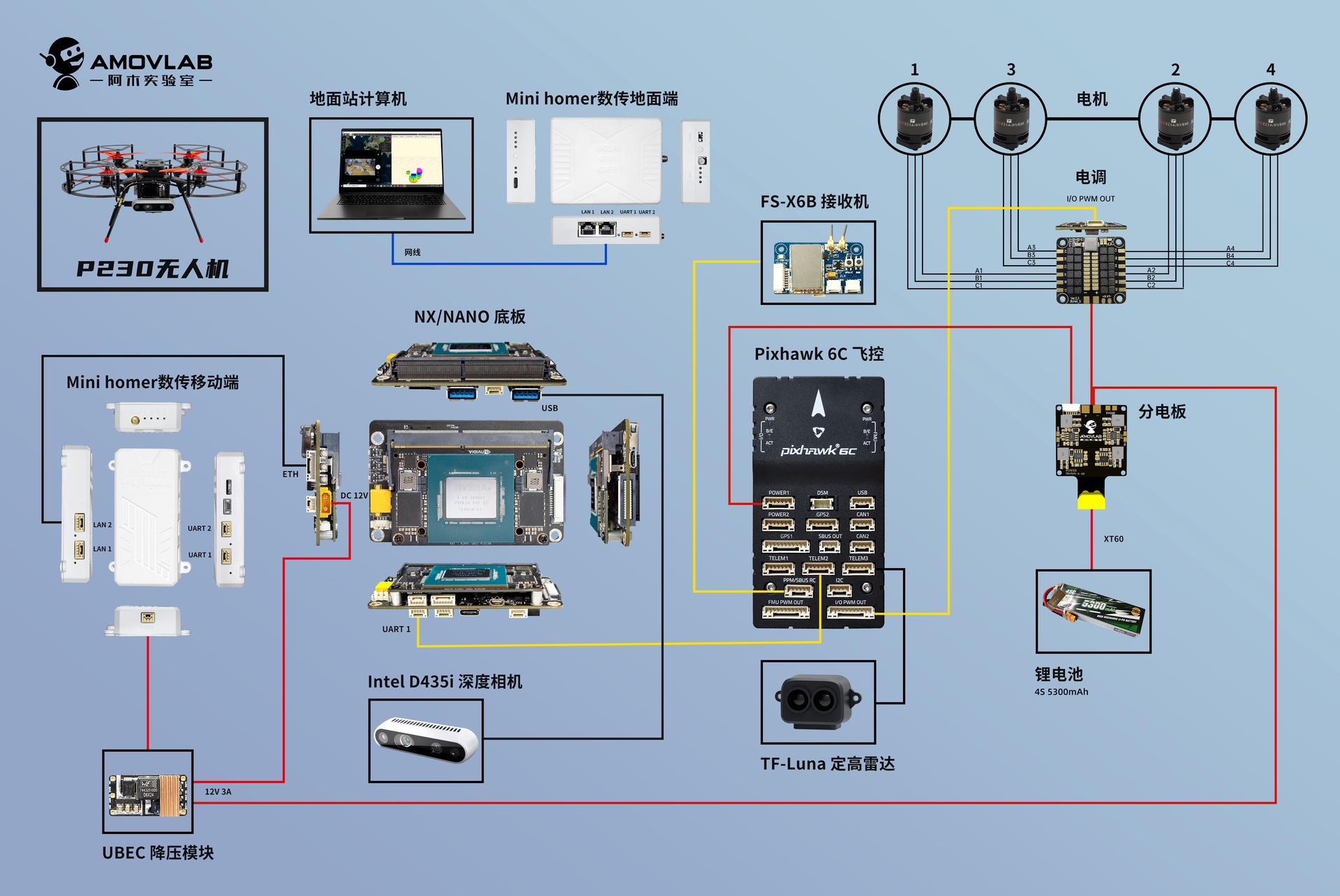
硬件接线图
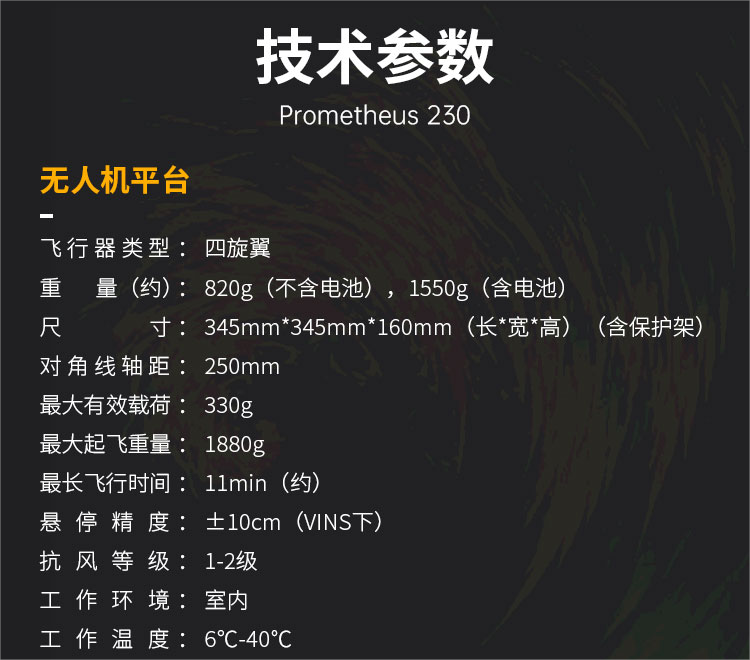
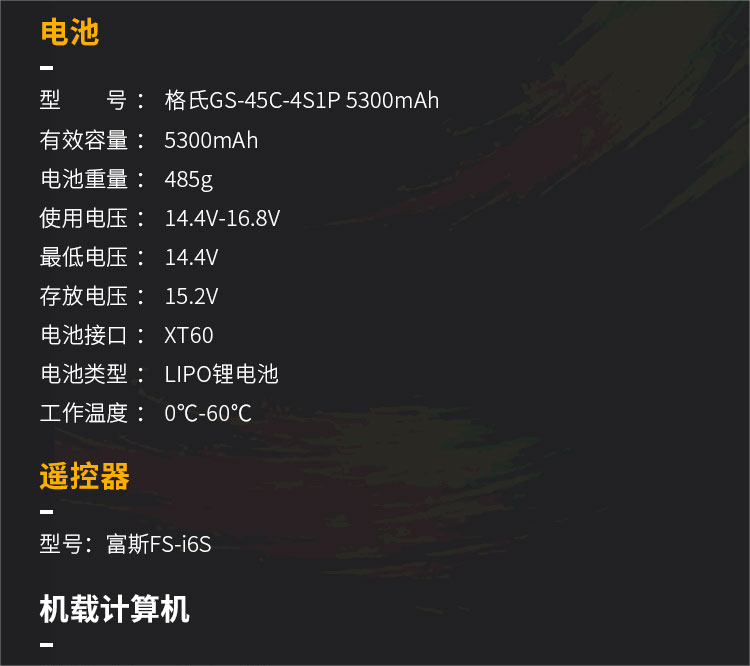
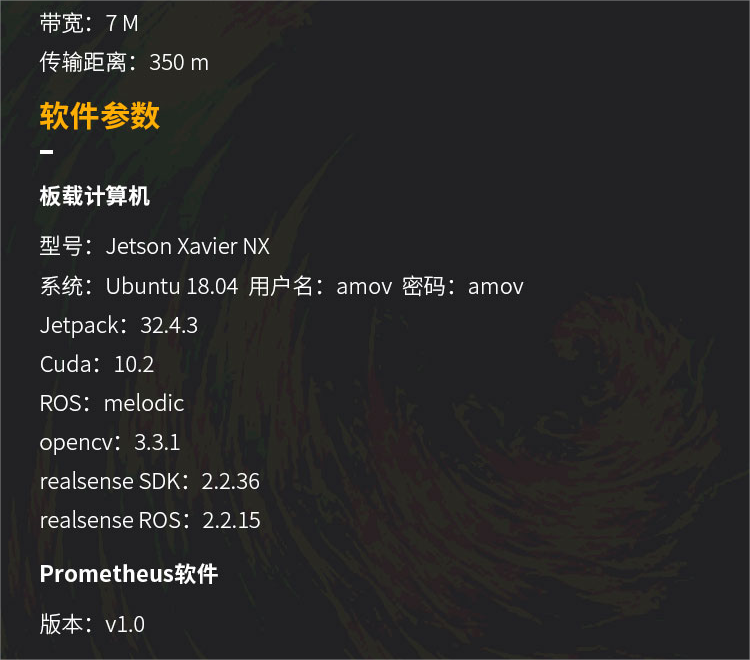
3. 参数
-
参数表如下所示