深度相机配置
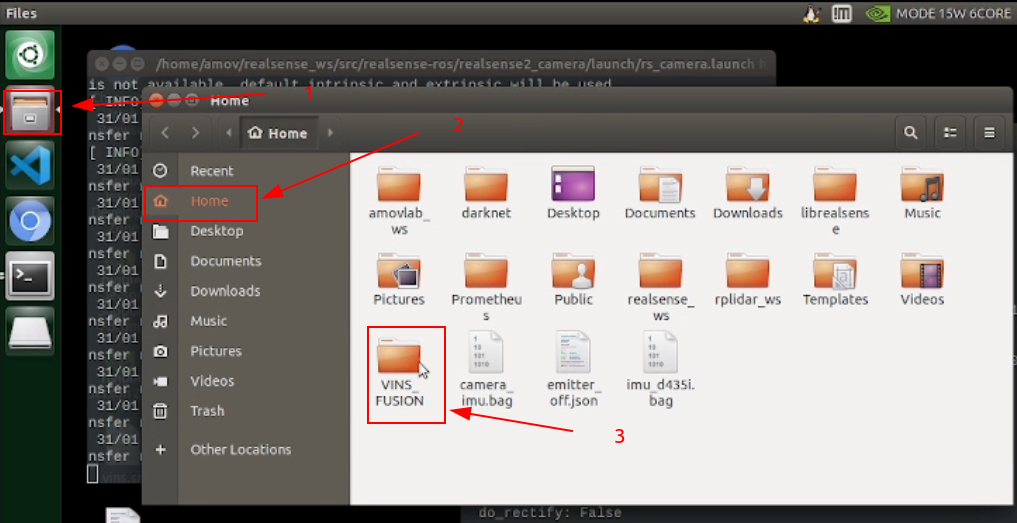
- 打开文件管理器
- 点击文件管理器图标
- 点击
Home,进入主目录(amov)。 - 进入
VINS_FUSION文件夹
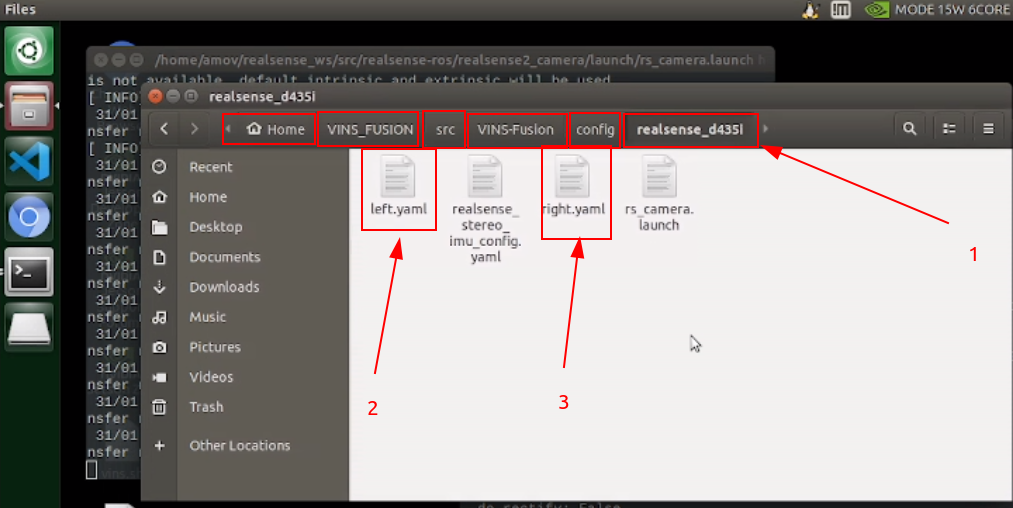
- 进入深度相机配置目录:
- 进入
Home/VINS_FUSION/src/VINS-Fusion/config/realsense_d435i,出现下图所示文件。 - 相机左眼配置文件,
left.yaml - 相机右眼配置文件,
right.yaml
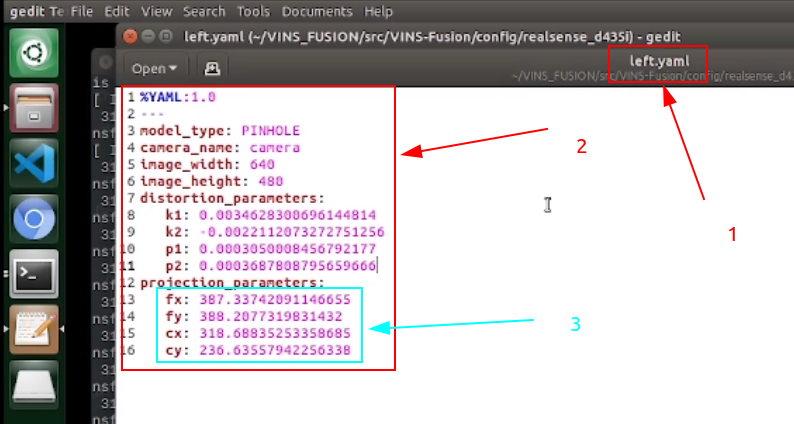
相机左眼配置
- 双击打开
left.yaml文件。
- 确定是相机左眼
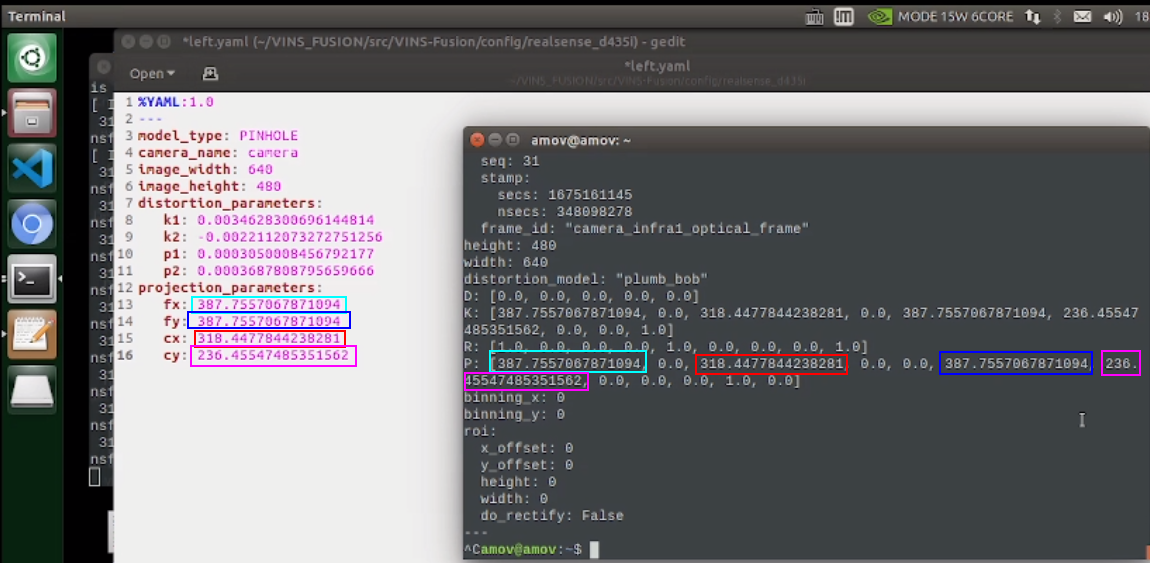
- 出现左眼配置
- 需要修改的数据
fx、fy、cx、cy
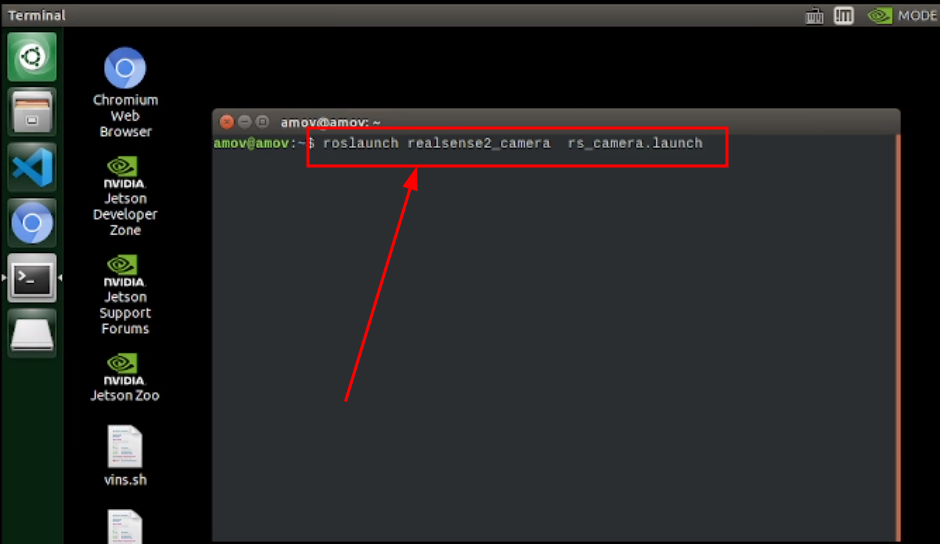
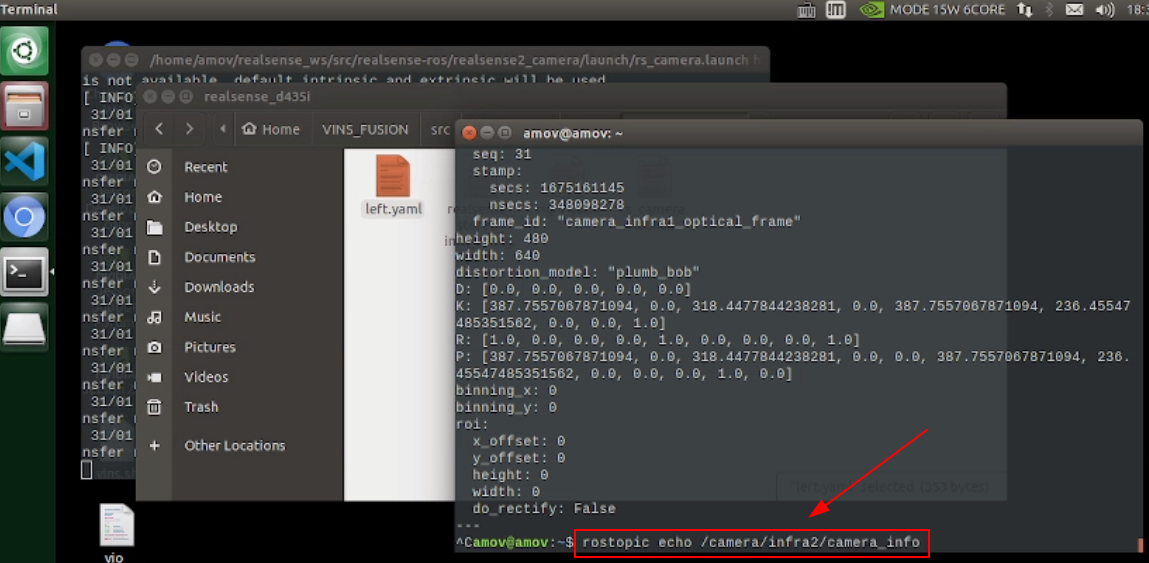
- 打开终端,输入命令
roslaunch realsense2_camera rs_camera.launch,然后回车,启动相机相关节点。
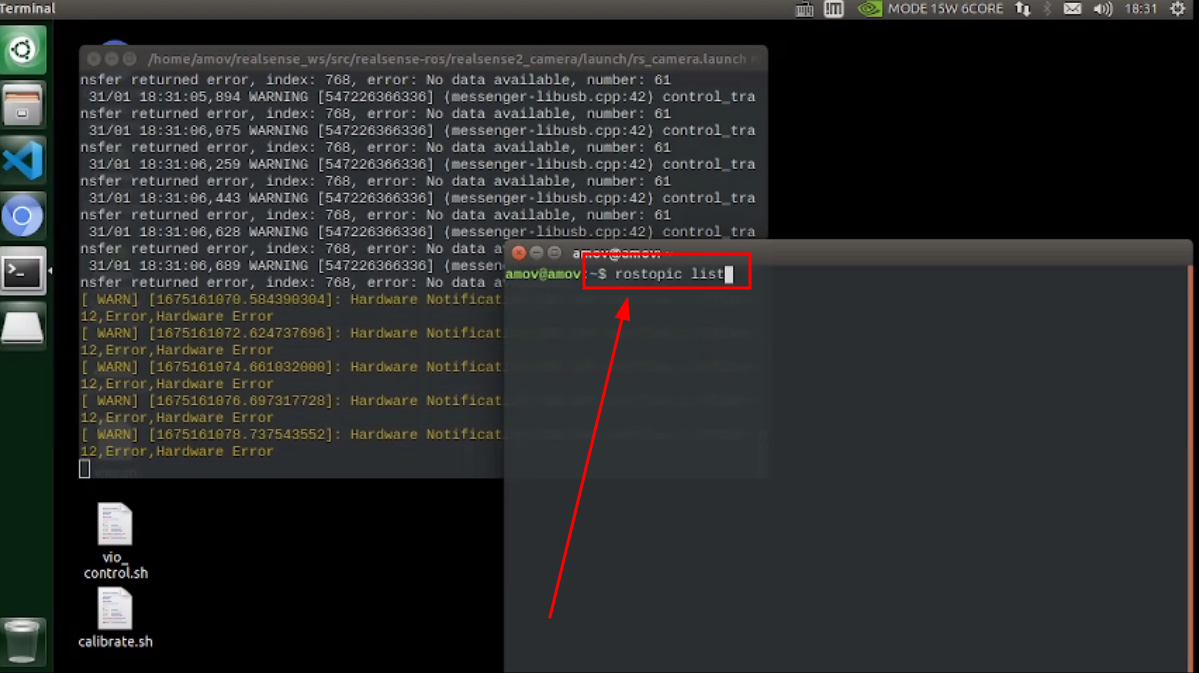
- 新开一个终端,输入
rostopic list,回车,之后终端会罗列出运行的所有话题。
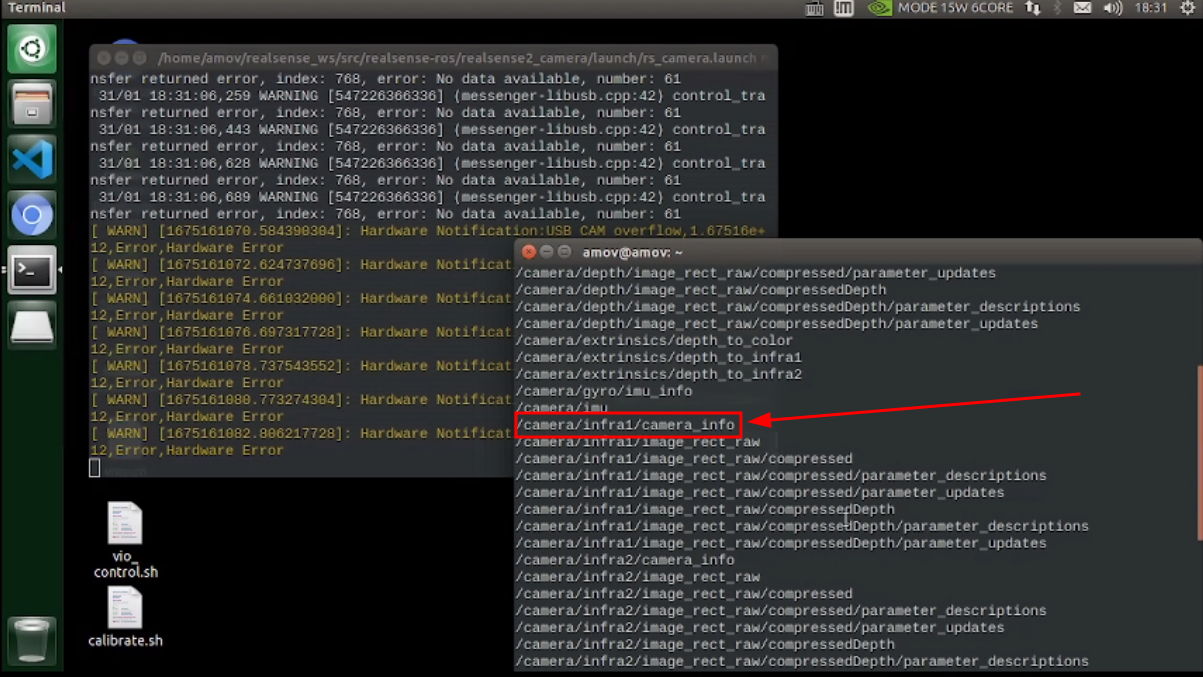
- 在列出的话题中找到
/camera/infra1/camera_info,复制该话题名。
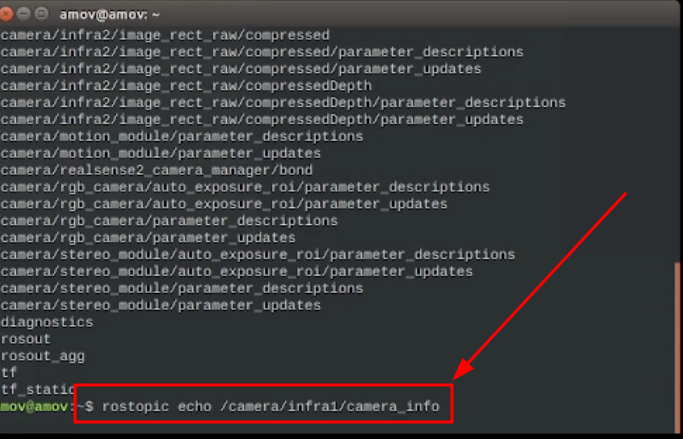
- 在终端输入命令:
rostopic echo /camera/infra1/camera_info,回车,会在终端打印出左眼相机数据。
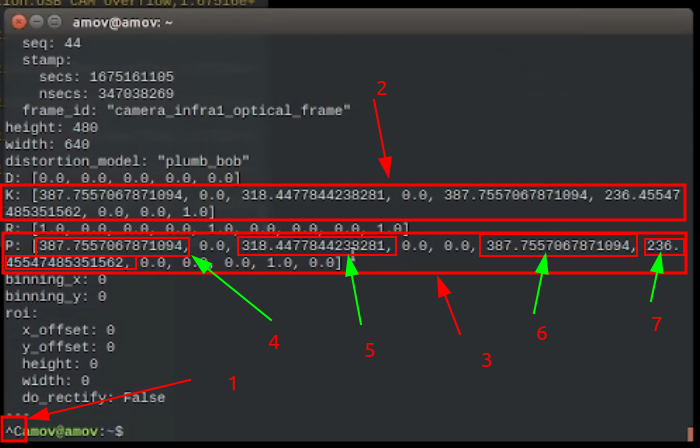
- 出现以下所示数据:
- 使用
Ctrl + C快捷键来终止命令,方便复制数据。 - 和 3. 的数据内容是一样的,选择一个复制即可 (此处选择 3 的数据复制)
- 对应的
fx - 对应的
cx - 对应的
fy - 对应的
cy
- 下图是将终端的数据复制到对应的
left.yaml文件位置 ,然后保存left.yaml文件
- 右眼相机配置同理
相机右眼配置
在上一节相机左眼配置的基础上,终端输入 rostopic echo /camera/infra2/camera_info,回车,会在终端打印出右眼相机数据。
- 在刚才打开
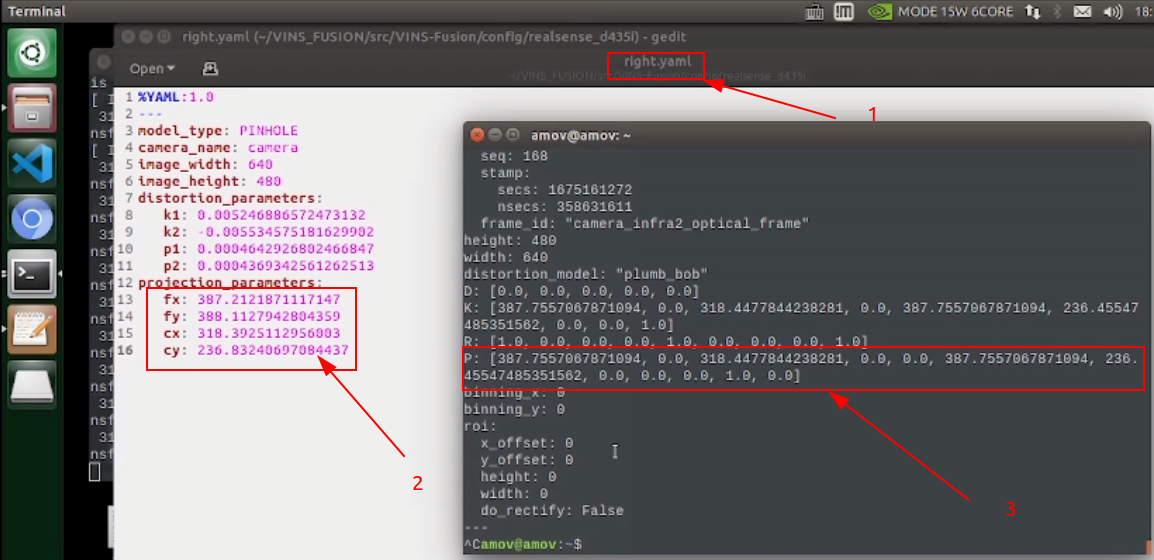
left.yaml的目录下,双击打开right.yaml文件
- 打开
right.yaml文件。 - 需要修改的数据
- 需要复制的数据 ,从左到右为
fx、cx、fy、cy
- 和左眼配置同理,将终端数据复制到
right.yaml文件的对应位置。
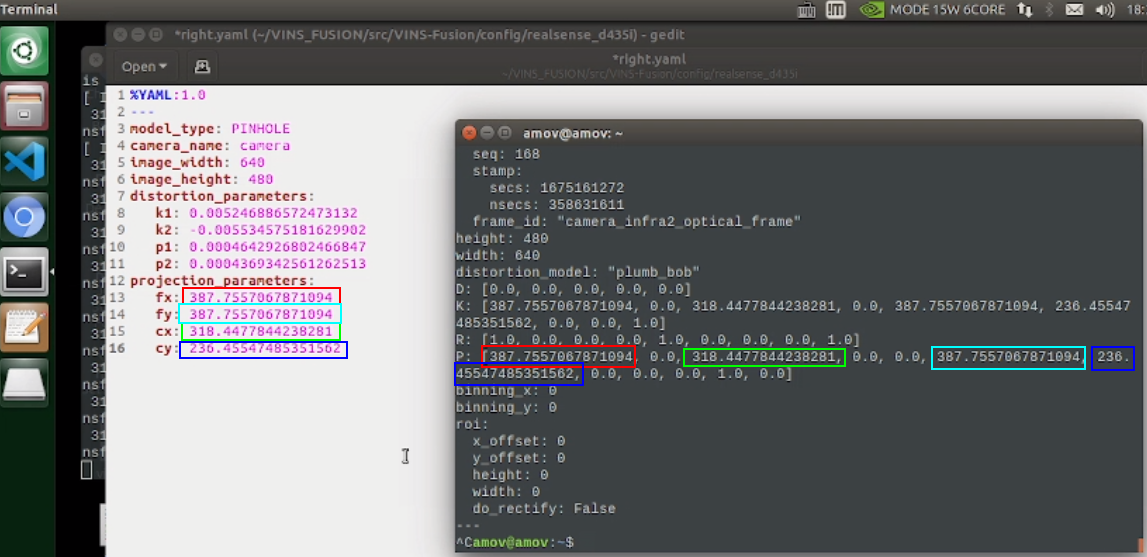
- 保存并退出,至此相机配置完成。