快速入门
1. 使用前须知
-
使用者需要仔细阅读本wiki,避免炸机。
注意!
受限于开源飞控硬件性能,飞机在长时间不用后会出现位姿漂移,要求每次飞行前电池重新上电以重启飞控和板载计算机,并严格按照wiki规范操作,避免炸机风险。
2. 开箱视频
3. 电脑设置
-
准备一台笔记本电脑,电脑系统不做要求,可以是Windows7,Windows10或者是Ubuntu系统。需要安装QGroundControl(以下简称QGC)和nomachine。QGC的作用是连接到飞机,监控飞机本身的状态(传感器是否正常,参数配置是否正常);nomachine用作远程连接到板载计算机。
提示:
软件安装包请在百度网盘自主下载网盘链接提取码:amov
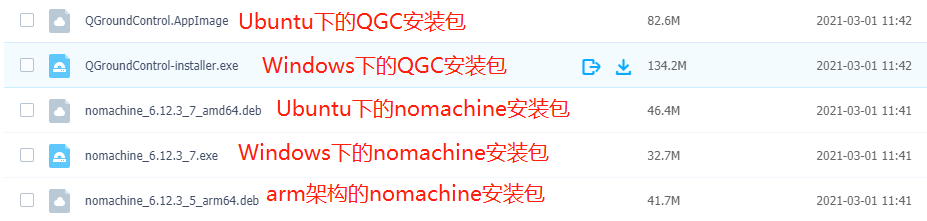
从图中可以看到,有不同操作系统下的安装包,根据自己笔记本电脑系统安装相应的QGC和nomachine。
-
安装QGC地面站
-
正确安装上面安装包之后,打开QGC地面站:
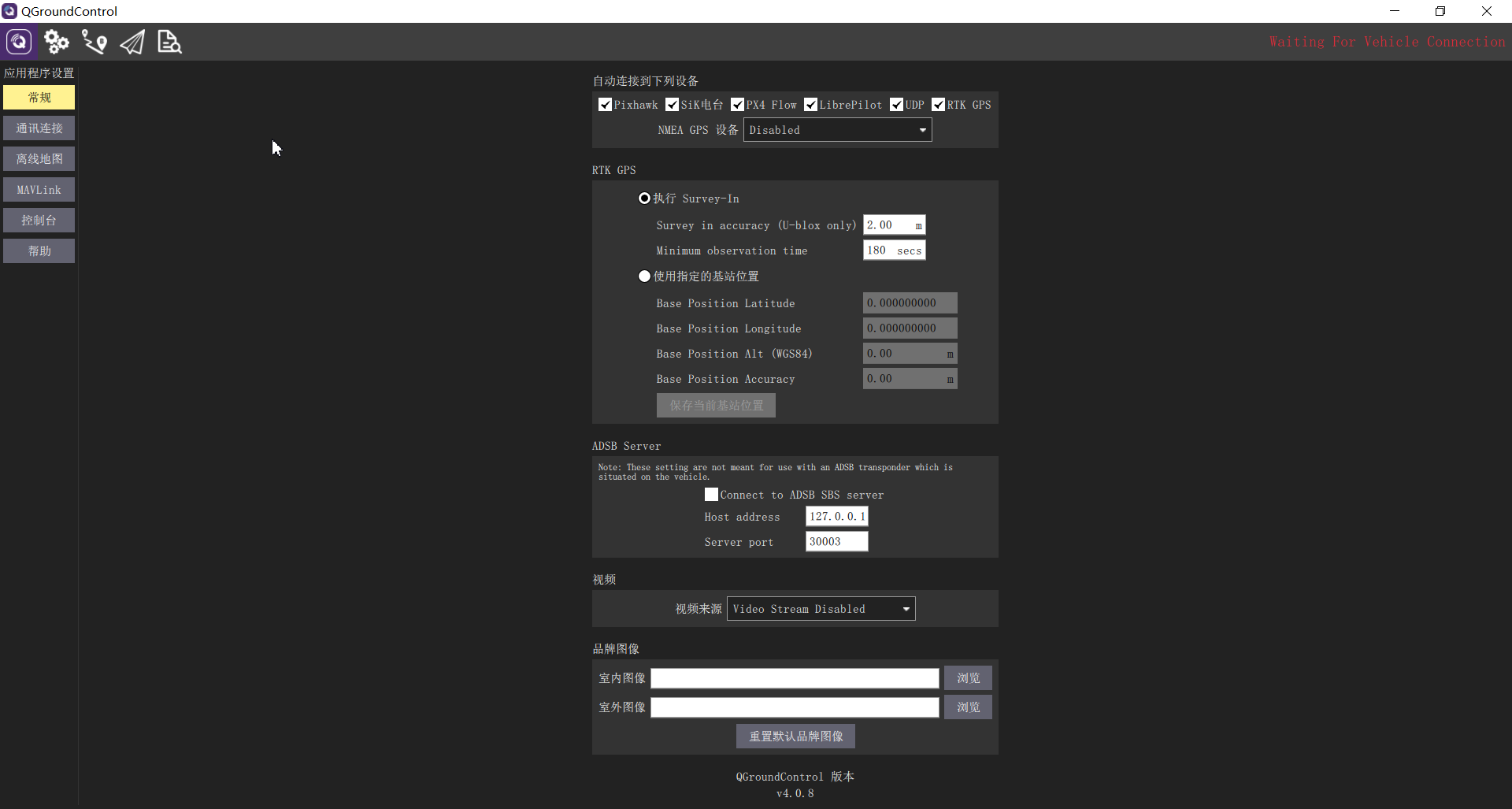
注意!
最下方的版本是V4.0.8
-
安装nomachine
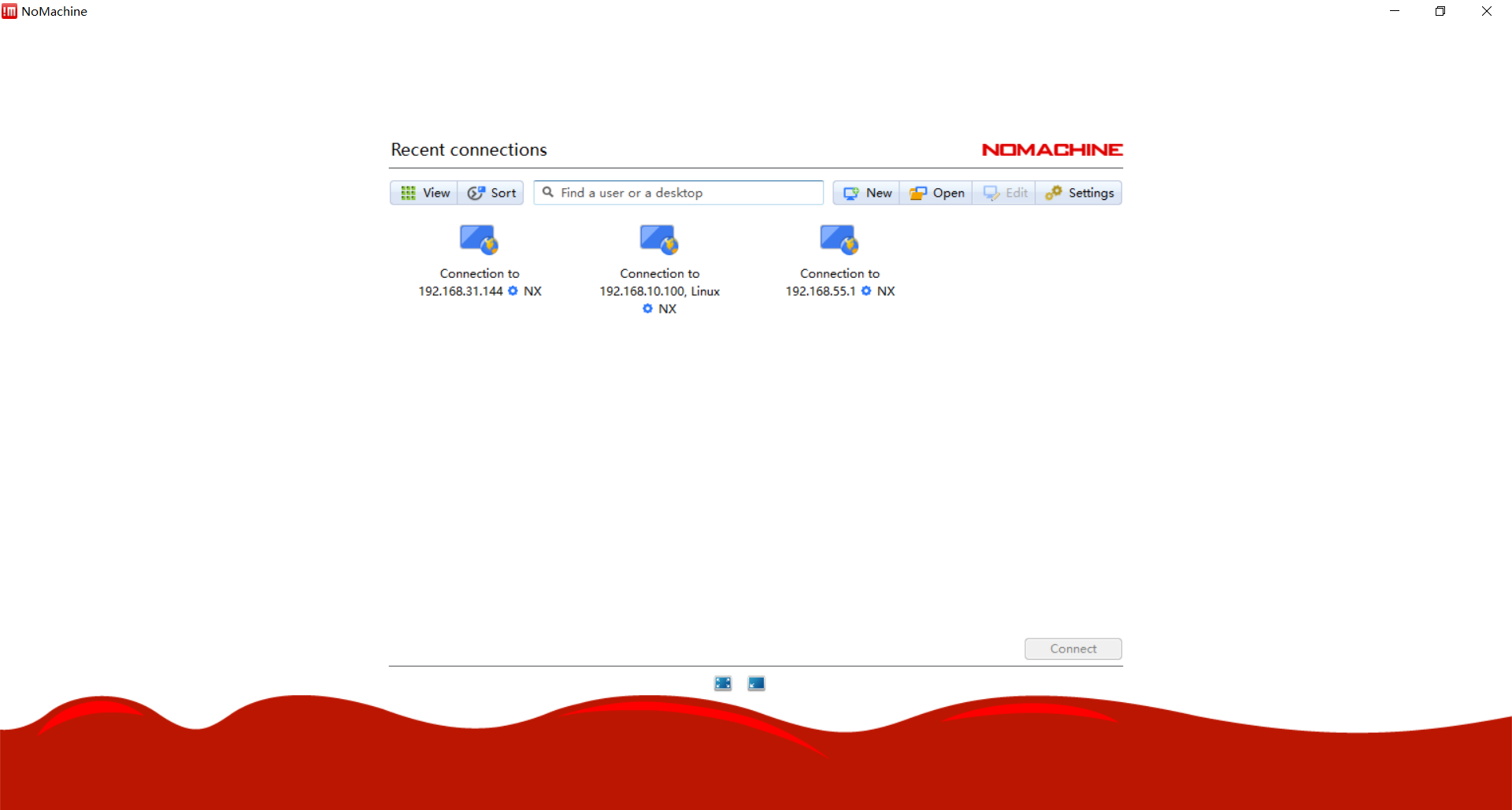
正常安装按完成之后,打开nomachine:
安装完软件后,我们就可以先给无人机上电了。上电之前我们需要先做些准备工作。
4. 使用前的检查和注意事项
飞行环境介绍
-
我们的飞行环境如下图所示。
提示:
1.使用T265进行定位的飞行环境需要特征点丰富,比如有二维码或其他特征点明显的物体。 2.vins视觉定位对测试环境(光照条件、视觉特征点等)依赖较大,非vins专业人士 建议测试场地做如下部署:地面采用颜色交错的地板、且四周墙面尽量张贴二维码A4纸(发货时赠送的二维码A4纸,最忌四面白墙),以此增加飞机视觉定位的稳定性、保障试验效果的理想,相反在视觉特征点不明显的环境下定位数据容易发散、炸机风险增高。
提示:
二维码图片包可在百度网盘自主下载网盘链接 提取码: a6ow
4.使用前的检查和注意事项
使用前需要准备以下硬件
-
P230无人机+富斯i6s遥控器

-
遥控器电池+安全绳+MiniHomer地面端+4S5300mAh航模锂电池

5. 组装及使用
-
遥控器的使用

1:SWA拨杆,未启用。
2:SWB拨杆,未启用。
3:SWC拨杆,出厂设定为五通道(channel 5),上位为自稳模式(stabilized)或定高(altitude),中位为定点模式(position),下位为降落模式(land)。
4:SWD拨杆,出厂设定为六通道(channel 6),上位为关闭offboard模式,下位为打开offboard模式。
5:左摇杆,上下设定为油门,左右设定为偏航。
6:右摇杆,上下设定为俯仰,左右设定为横滚。
7:电源键,同时按下开关机。
遥控器使用左手油门,两个摇杆均自动回中.使用了遥控器6个通道,5通道设置为SWC三段开关用来控制飞行模式,飞行模式分别为自稳模式(stabilized)/定高(altitude),定点模式(position)和降落模式(land),6通道设置为SWD两段开关用来关闭/激活offboard模式。
注意!
遥控器开机前请确保所有拨杆拨到最上端,否则无法开机。
使用遥控器飞行前请熟悉预设飞行模式的含义、进入条件等,贸然飞行可能导致炸机!

左摇杆打到右下角三秒解锁无人机,左摇杆打到左下角三秒上锁无人机。
警告!
降落时请务必等待电机处于怠速状态再进行上锁操作,处于非怠速状态左摇杆左下上锁会使无人机倾斜倾倒甚至炸机!具体请查阅PX4官方说明
-
充电器的使用
本小节主要介绍锂电池充电方式,根据您本次的实验时长来评估飞机锂电池电量是否能够完成外出实验。建议每次外出飞行前将电池电量充满。 不同时期的的P230订单可能会收到两种不同的充电器,下面是三种充电器的使用说明:
注意!
电量充满后请及时拔出充电器!不要满电后长时间充电,以防电池过充!
-
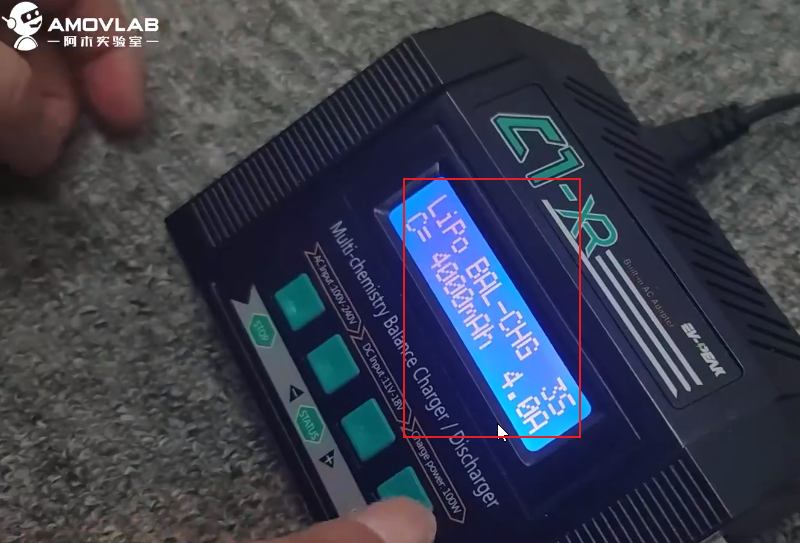
智能平衡充电器C1-XR
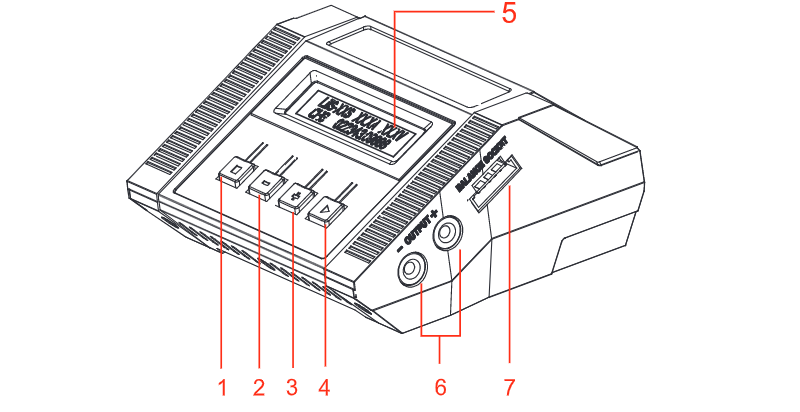
使用智能平衡充电器 C1-XR给电池进行充电,先简单介绍以下C1-XR充电器,详细请查看说明书:智能平衡充电器C1-XR

(此图需要更新)
- 1:模式选择/退出
- 2:减
- 3:加
- 4:开始/确认
- 5:LCD显示屏
- 6:主输出口
- 7:平衡接口
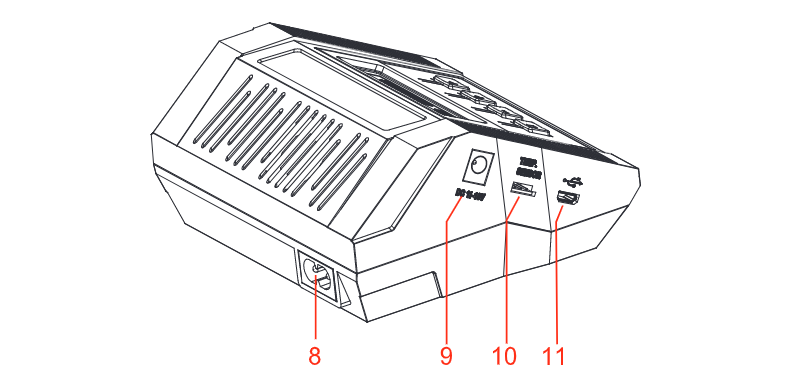
- 8:AC输入接口
- 9:DC输入接口
- 10:温感口
- 11:Micro-USB接口
- 12:充电器电源线
- 13:平衡转接板
- 14:电池平衡口
- 15:DC输入线
6S 5000mAh锂电池
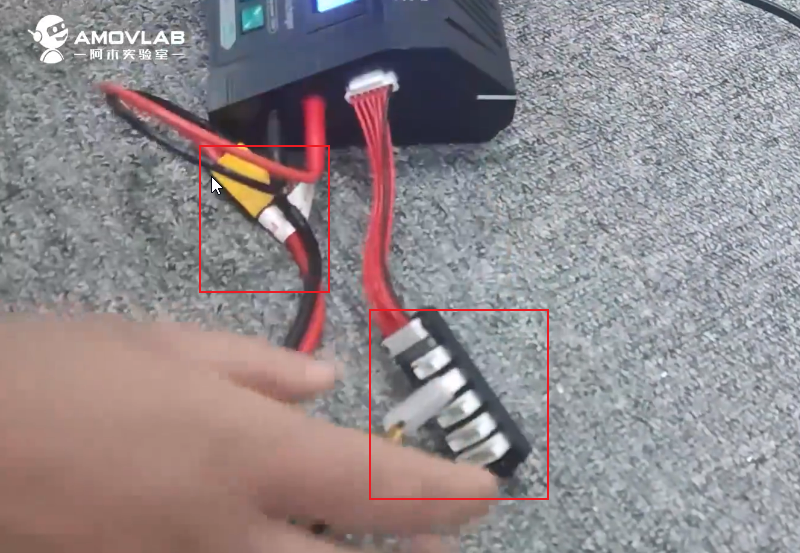
连接流程
- 连接电源:根据充电器介绍,将12充电器电源线连接至交流电插座(100~240V交流电源)
- 连接电池:将13平衡转接板和14电池平衡口连接至6S 5000mAh锂电池
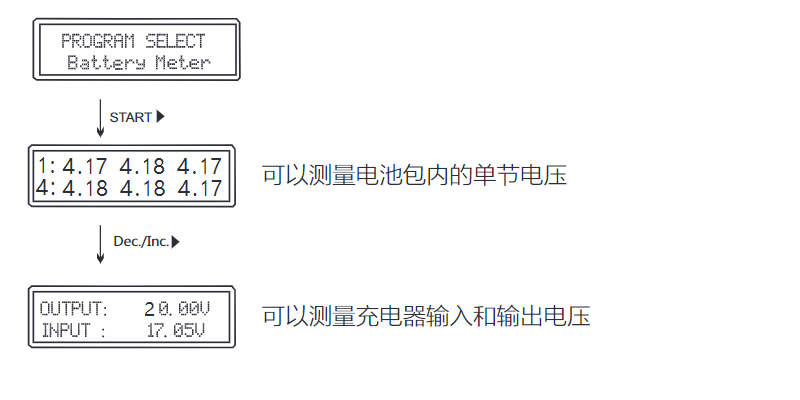
电压测量
该电池为LiPo锂电池,检测单节电池的电压,单节电池电量4.2为满电压,3.7为低电压。根据上述连接流程连接完成之后
充电流程
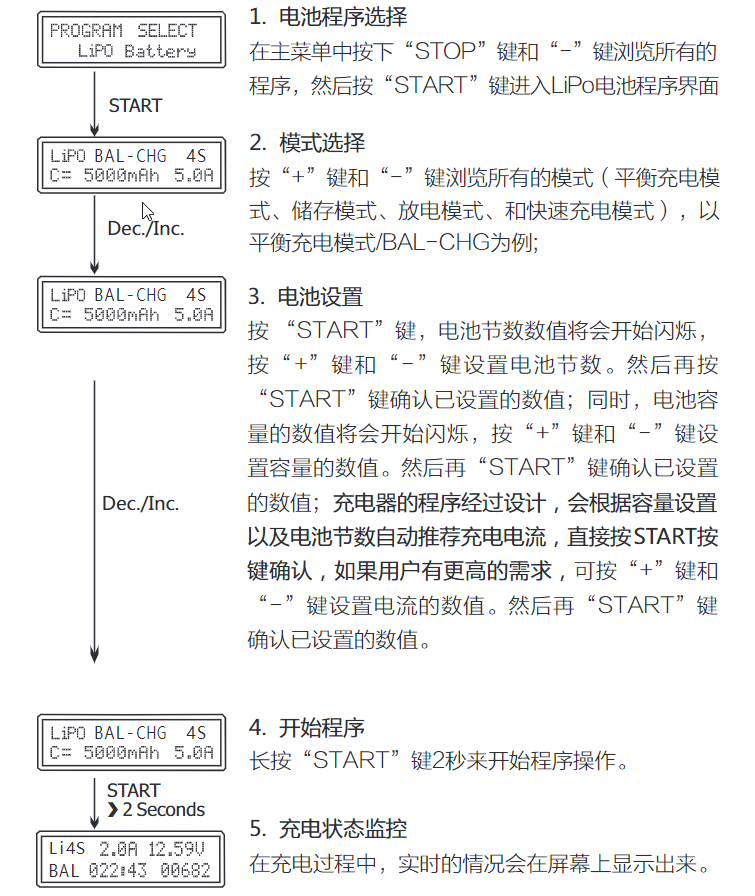
一般充完电也就需要70~90min之间。
-
电池的使用与保养
-
切勿过放:一般认为单片电芯的电压低于3.5V,就有可能对电池造成损伤,也就是常说的电池过放了,过放的电池会鼓包,这样的电池拿来继续充电是很危险的,可能会引起火灾,建议在电压降到 3.6V 的时候,就不要继续飞行了。因为地面空载测到3.6V,空中满油门飞行的时候,电压就远低于 3.6V,甚至低于 3V,很容易就过放了。
-
切勿过充:放电电压有下限,充电电压也有上限。上限是 4.2V,一节 3S电池,标称总电压11.1V,充满以后就是 12.6V,如果电压超 过了 4.2V,那就是过充,同样会损坏电池。现在的智能充电器会在 4.2V 时自动停充,但要小心有些航模充电器精度差,会过充,还有些充电器可以调节到高于4.2V 的电压,这是针对高压版电池的,普通电池不能用这个功能。充电的时候,模式要选平衡充电。电池长期保存时,电压是有要求的,单片电芯的电压保持在 3.85V 比较好。
-
电池存放:不要满电保存,满电保存对航模电池的放电能力会有 很大的影响,建议每次使用完电池后,都充放电到储存电压,特别是充满后没来得及使用的电池,一定要放电,长期满电存放,会损 坏电池,由于锂电池稳定性先天不足,正常存放也有一定起火概率。很多节锂电池堆放在一起不亚于一颗燃烧弹,平时存放时,电池应该避开易燃物单独保存,有条件的话,用防爆阻燃的容器存放。
-
-
无人机电源上电如下图所示

需要检查下各个接口有没有因为运输造成的接口松动,飞控与MiniHomer、飞控与机载计算机、D435i与机载计算机直接的连接是否稳定。

-
MINI HOMER连接至笔记本电脑
详细请参考:MINI HOMER模块配置有线IP地址
-
MINI HOMER地面端上电,将网线连接至PC网口。
-
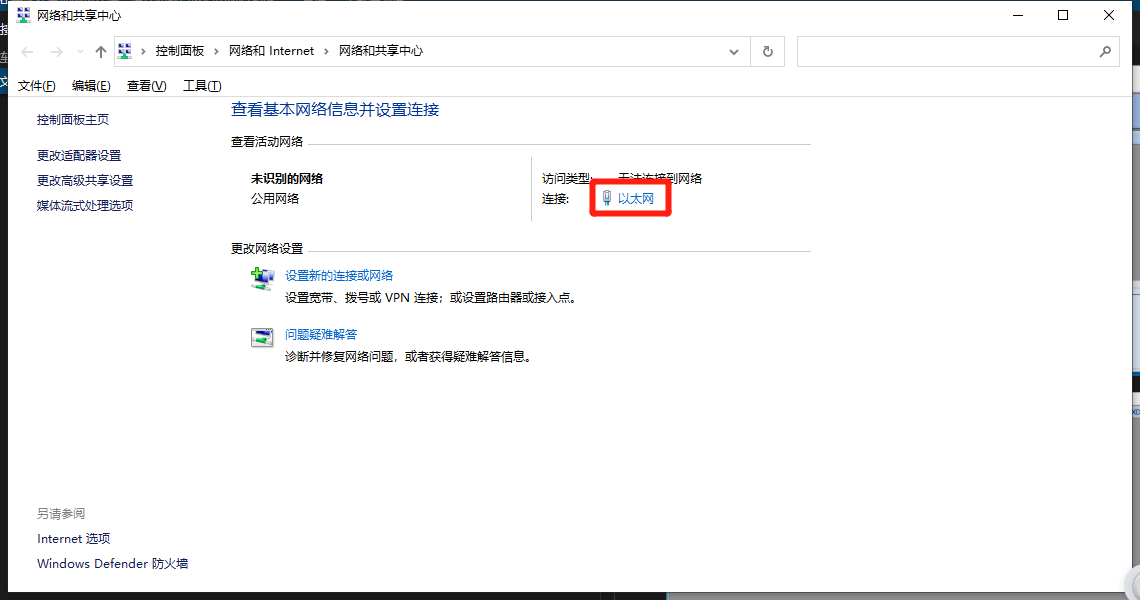
打开 控制面板\网络和 Internet\网络和共享中心,点击 以太网 如下图
-
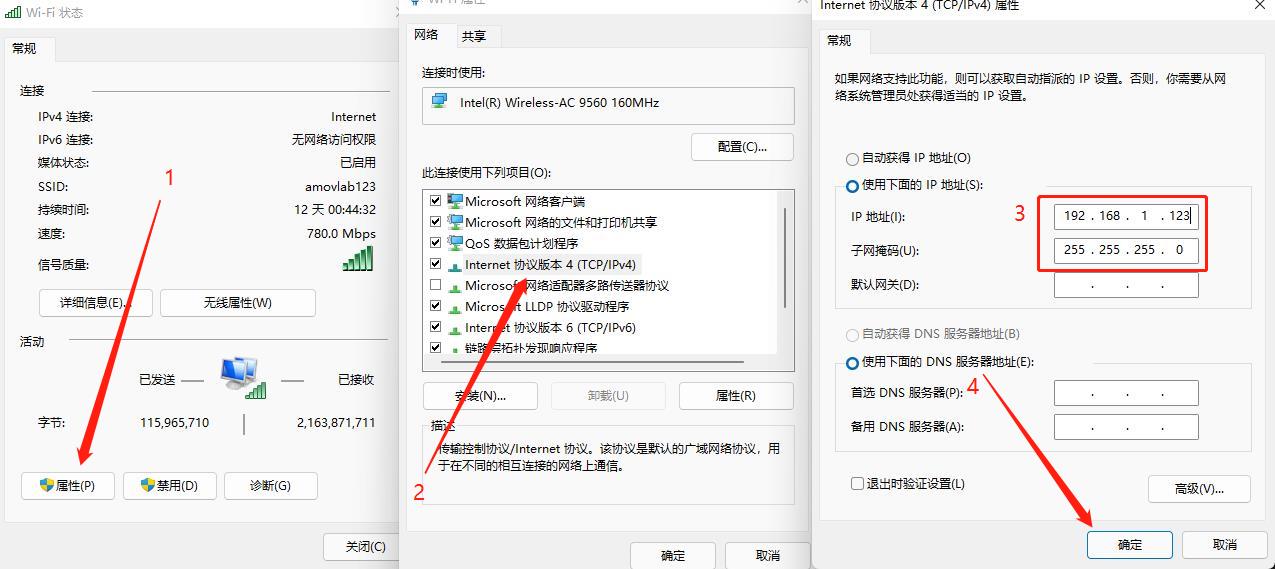
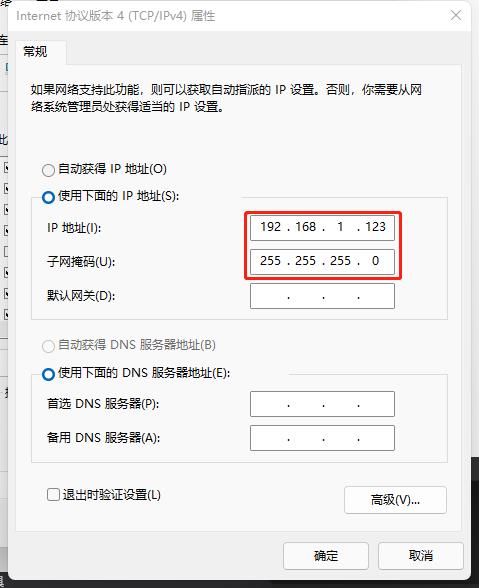
点击属性,双击Internet 协议版本4(TCP/IPv4) 如下图
-
将PC的IP地址固定为 192.168.1.123
注意!
需要将PC的IP固定为:192.168.1.123
-
打开QGC地面站之后,点击进入设置界面
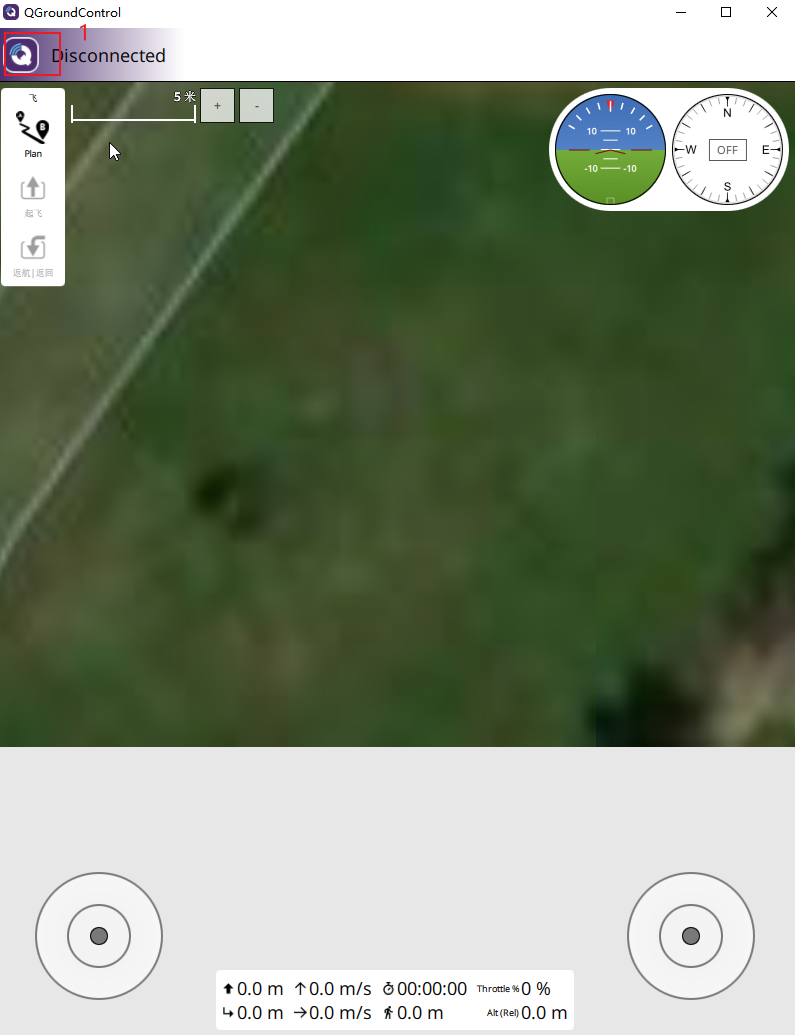
-
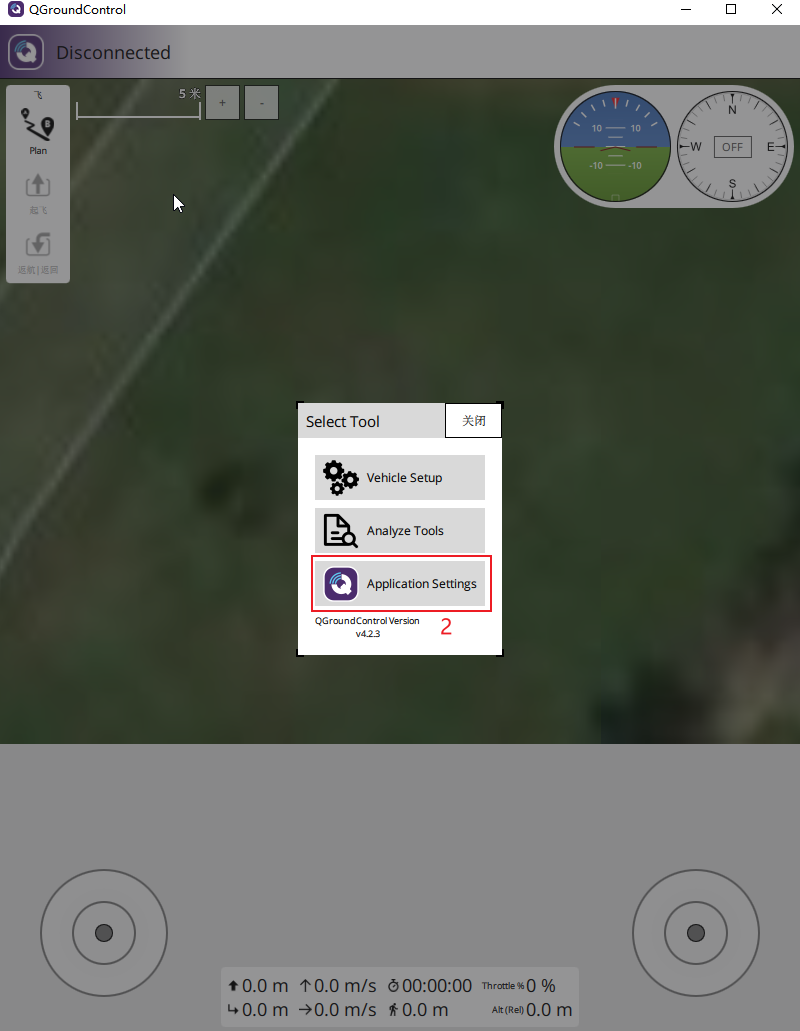
点击进入应用设置界面
-
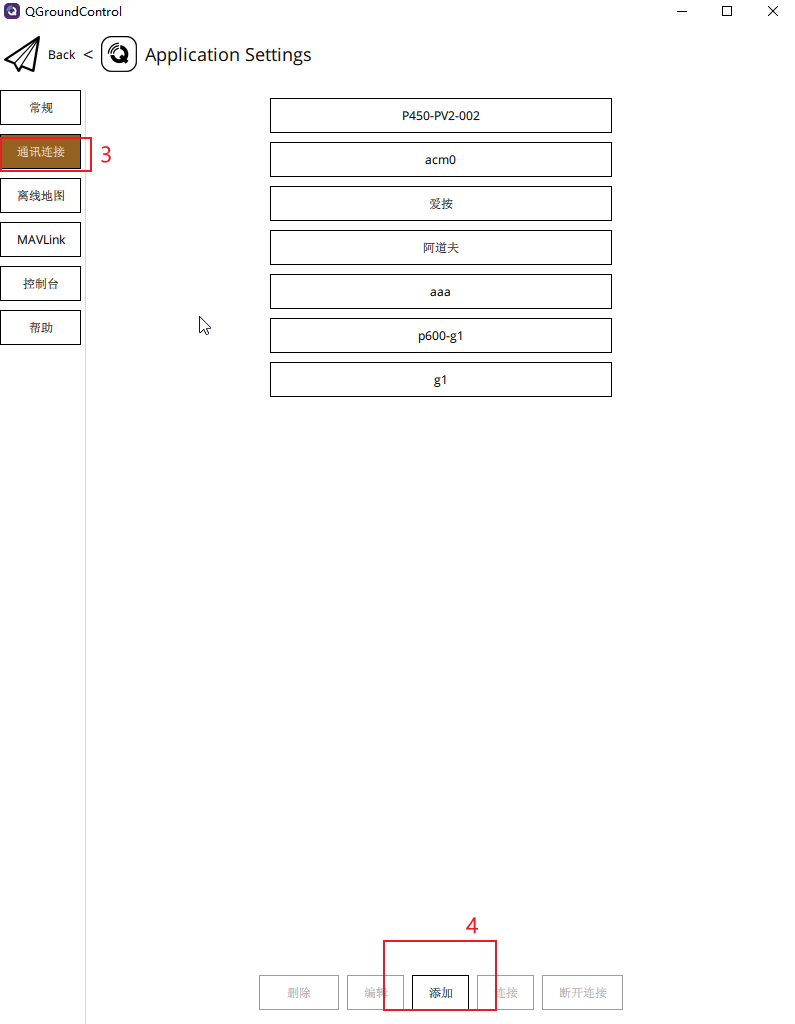
点击通信连接
-
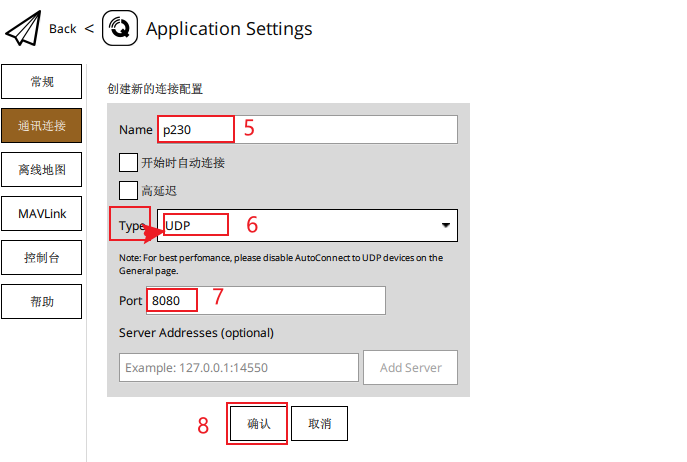
新添加一个连接(第一次启动QGC必须添加新的连接)
-
命名:可以自行命名,例如:p230
-
选择连接类型,选择UDP连接方式
-
选择端口号,出厂默认端口号为8080
-
点击确认即可
-
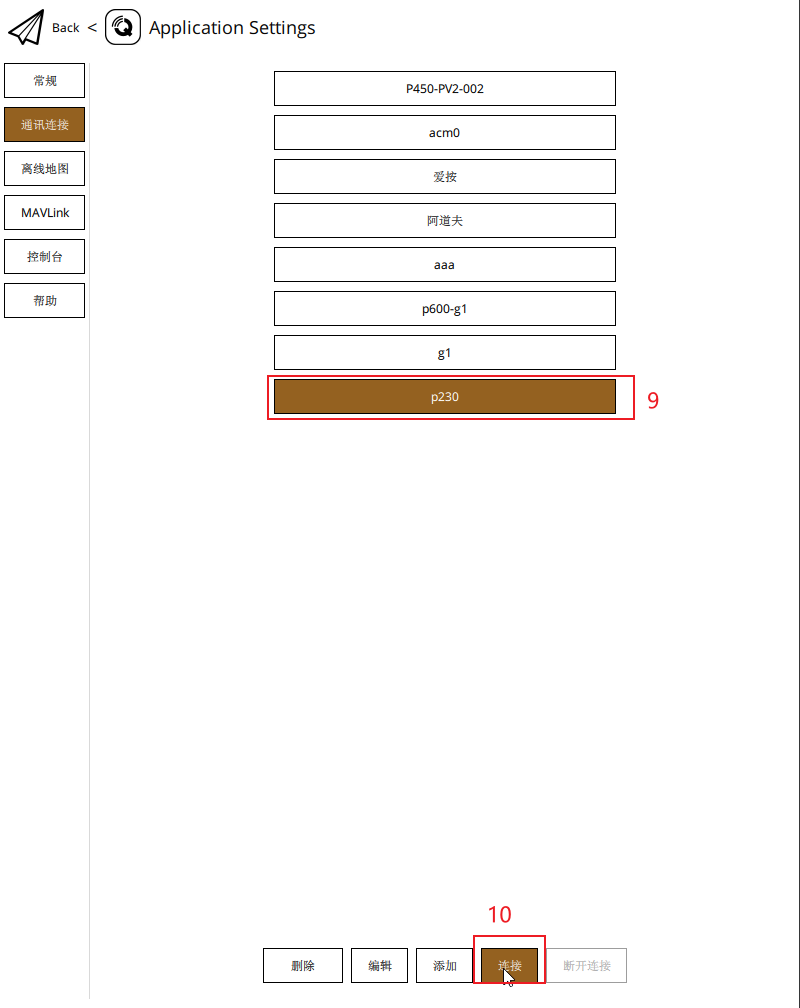
选中刚新建的 p230
-
点击连接
-
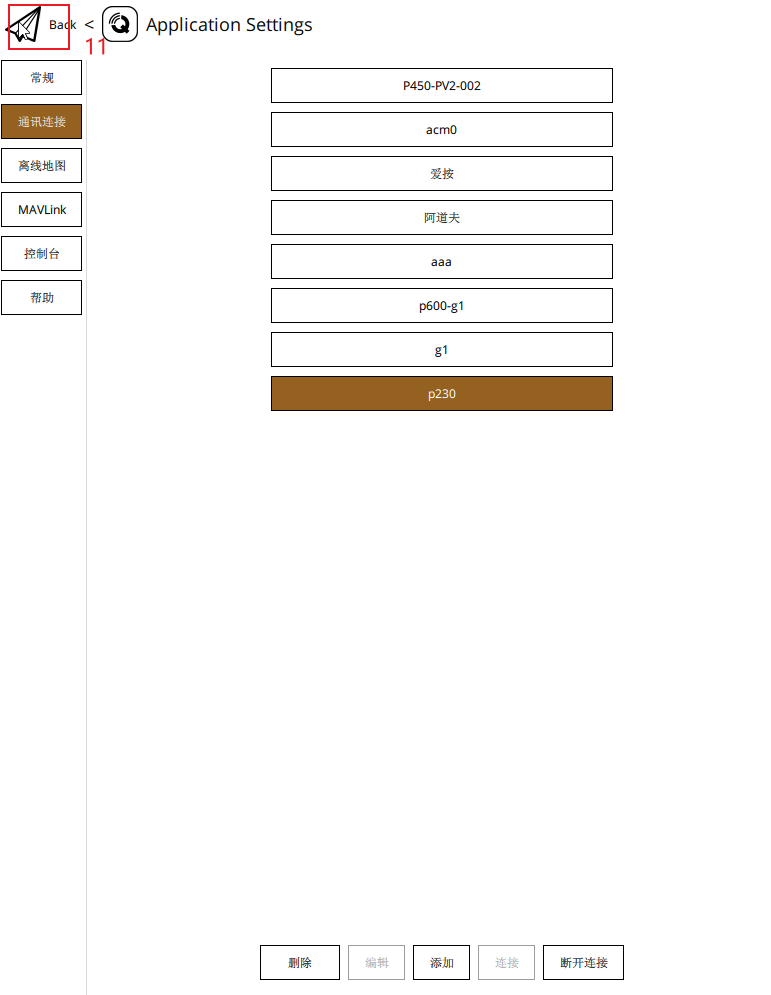
点击返回到飞行界面
-
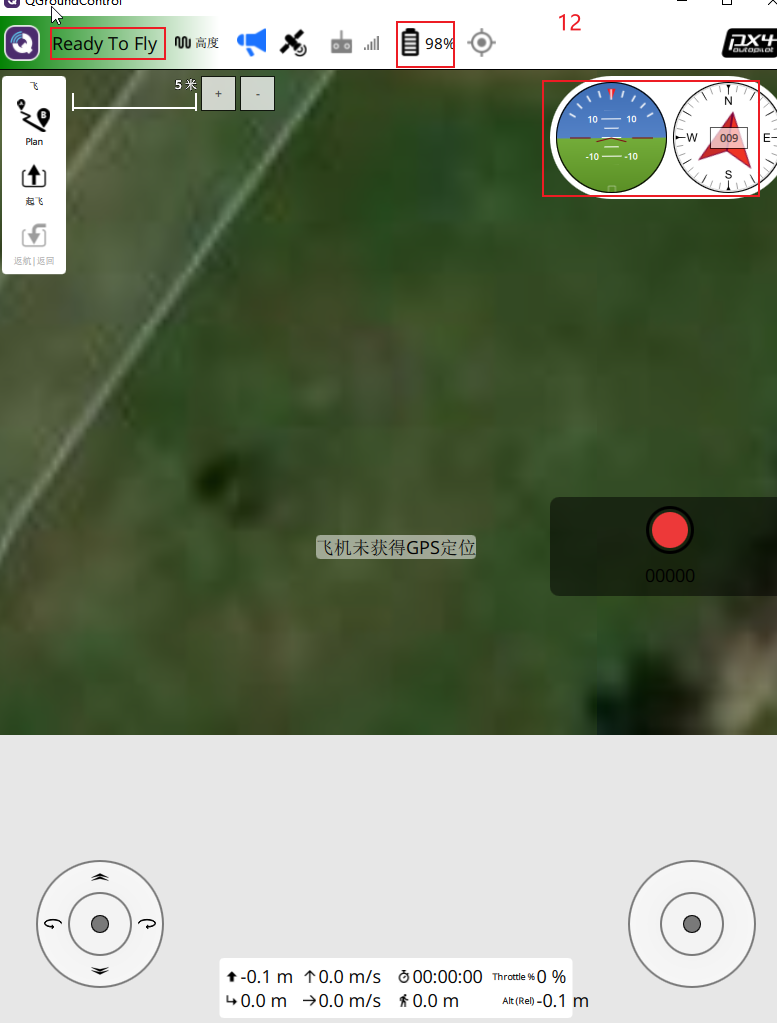
至此就已经成功连接QGC,可以监控无人机各个姿态信息状态
-
nomachine远程连接板载计算机
点击New注意!
默认出厂的机载计算机IP地址为:192.168.1.230
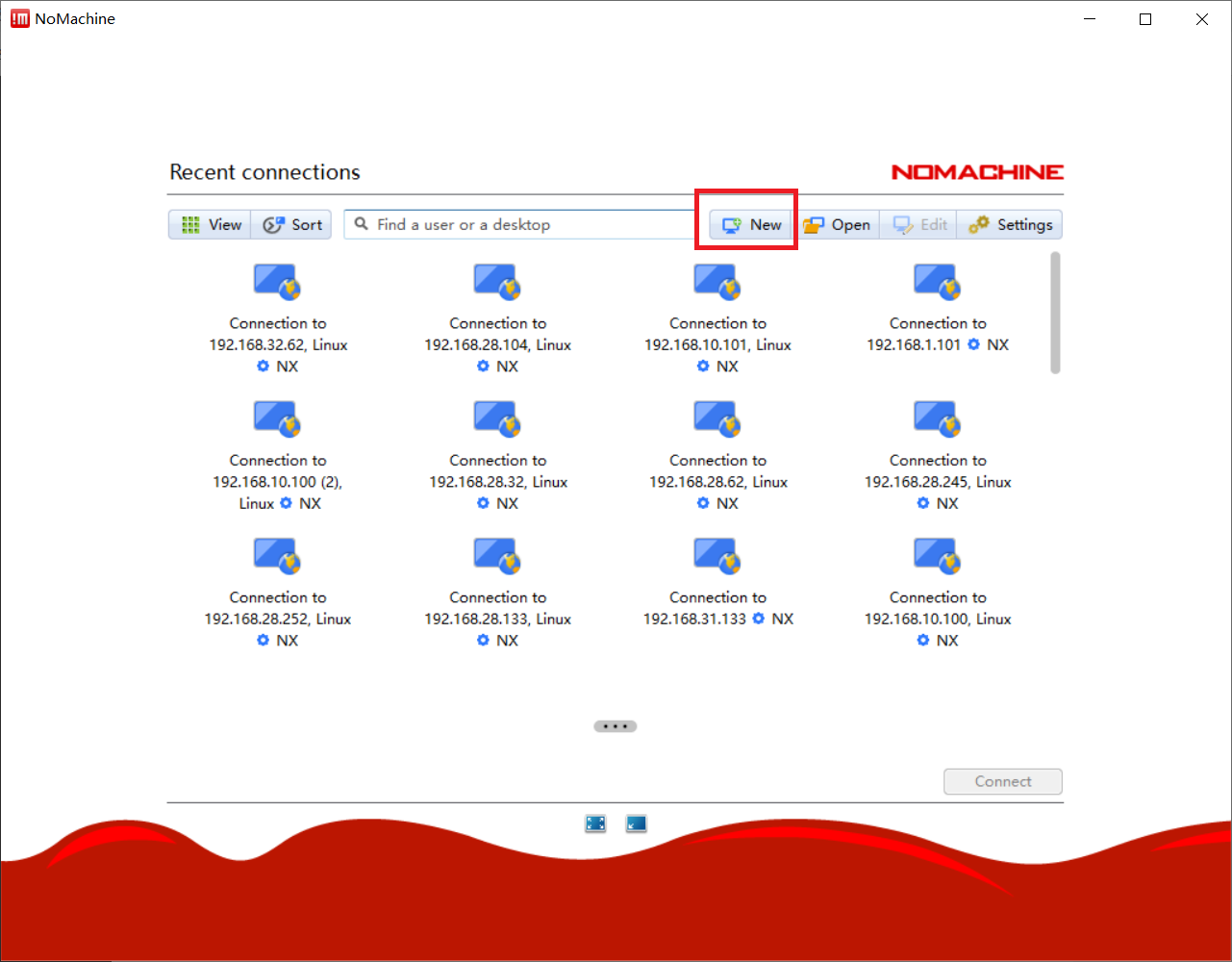
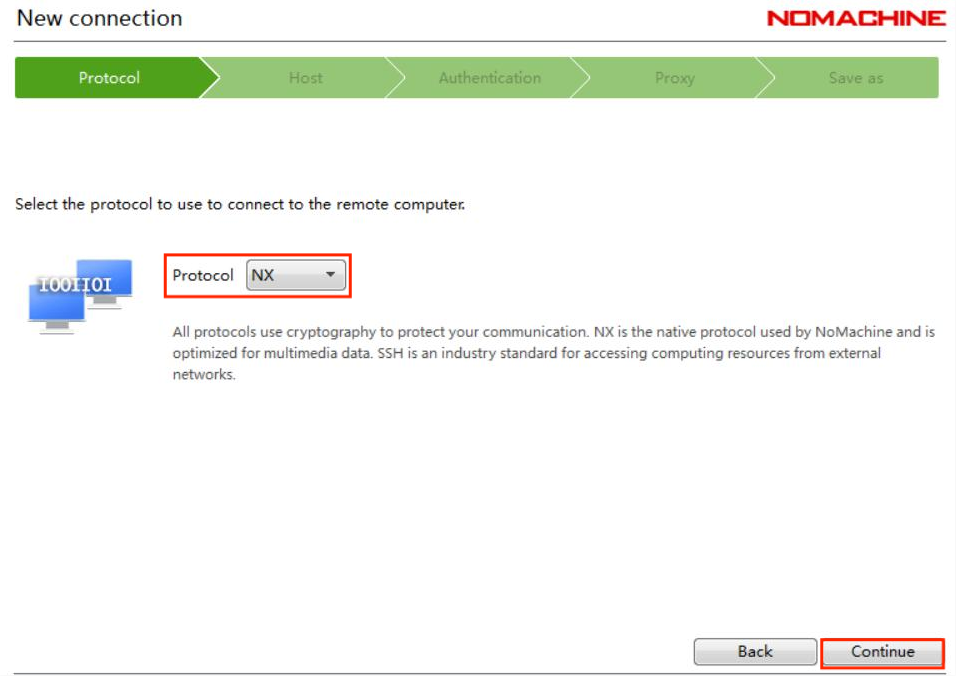
在Protocol下选择NX,点击Continue。
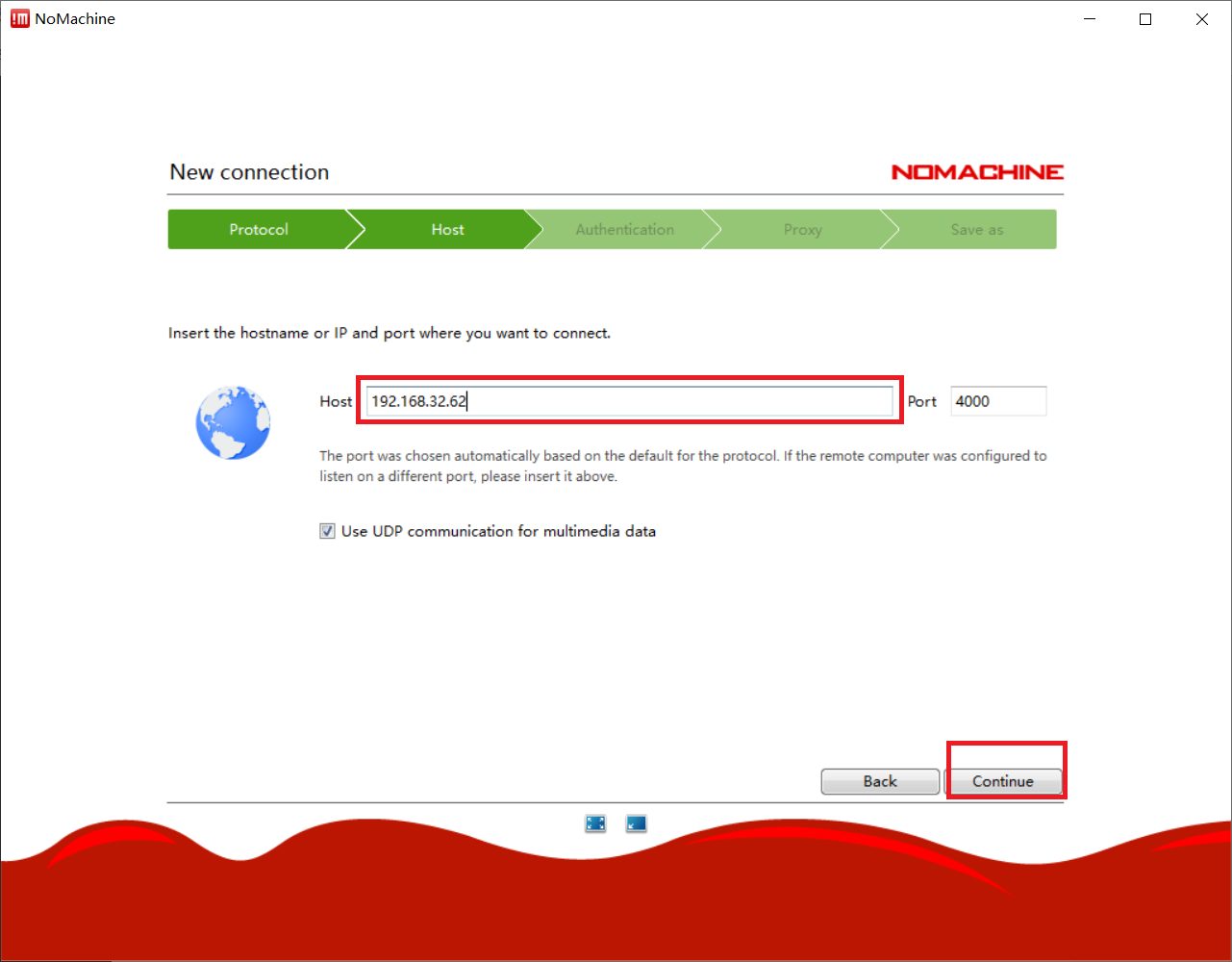
在“Host”下填写板载计算机的ip地址(默认出厂IP地址为:192.168.1.230),板载计算机地址参考步骤2,“Port”下默认4000。
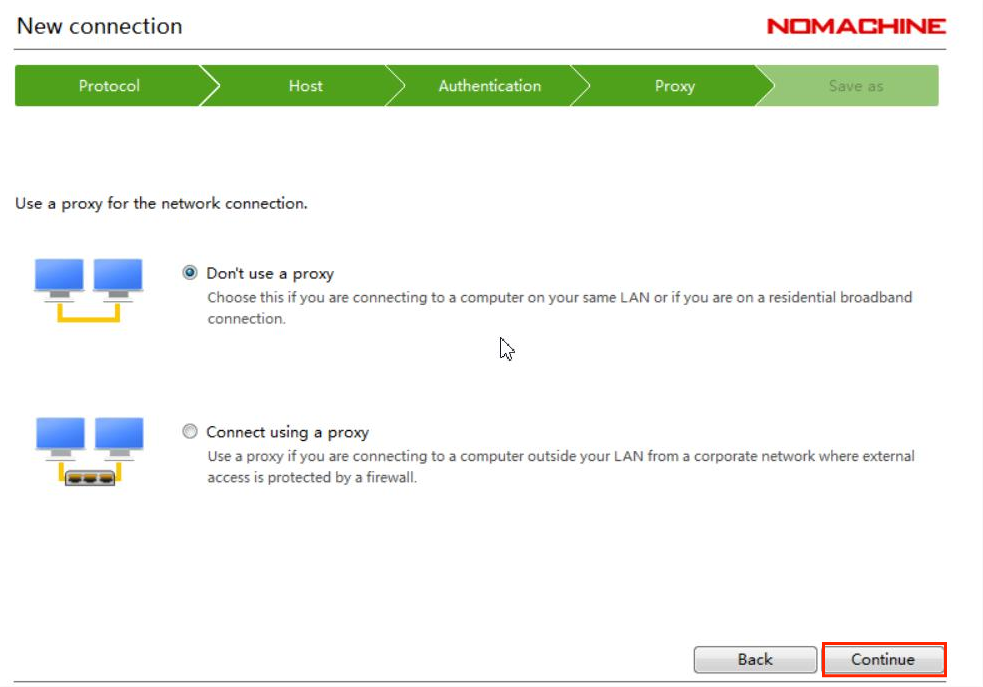
在Proxy下默认是“Don’t use a proxy”,点击“Continue”。
在Save as下会生成默认的name,可以不做更改,点击“Done”。
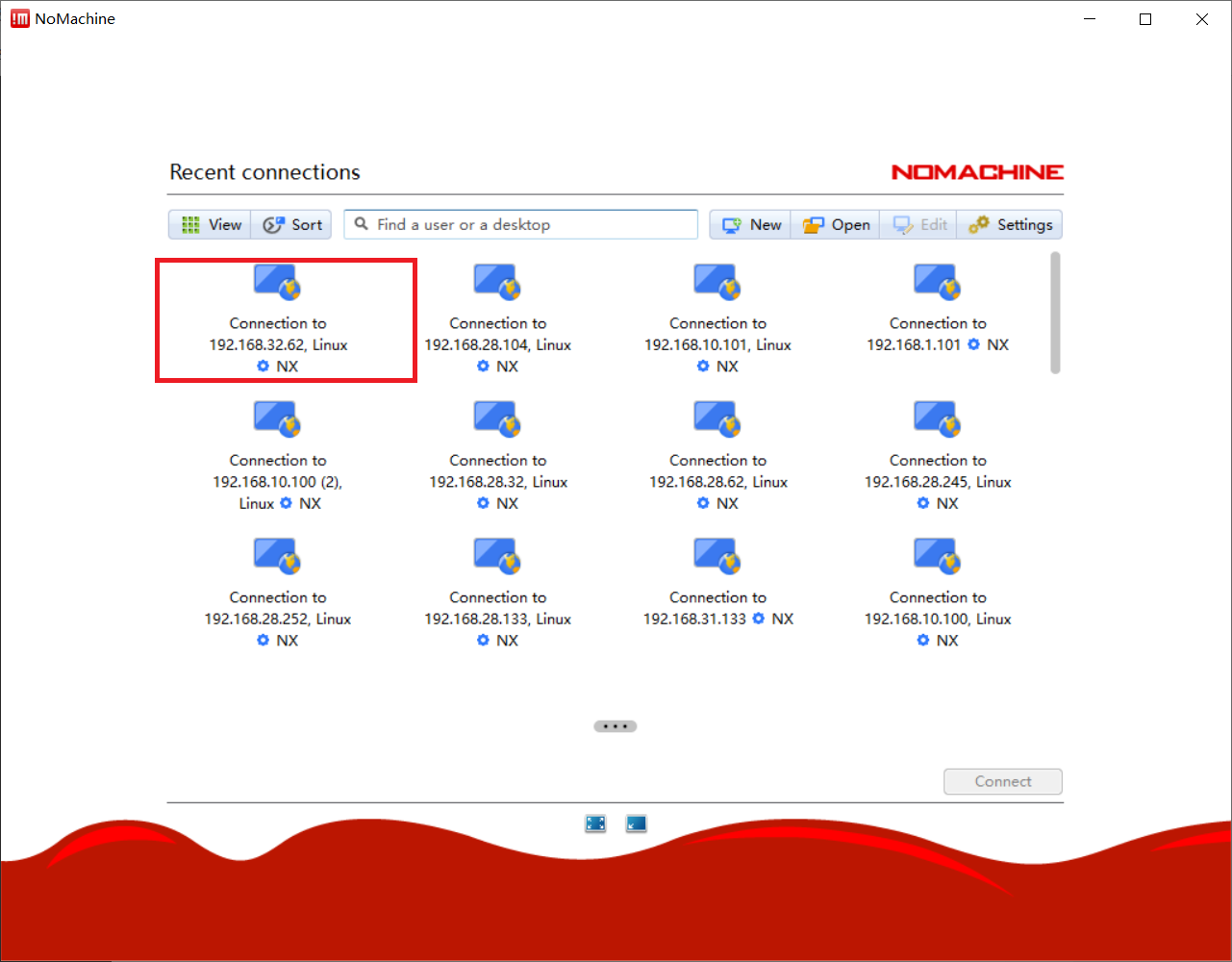
按照上述步骤操作,会自动生成如下图所示用红框标起的链接,点击“Connect”。
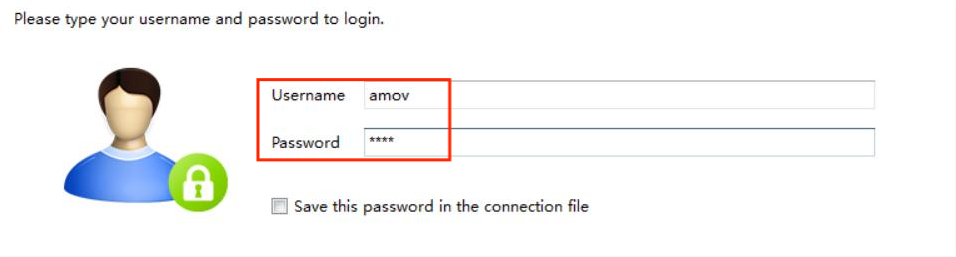
在“Username”和“Password”下输入“amov”
Nomachine成功连接板载计算机后会显示如下界面

6. 校准与参数设置
-
需要将无人机连接QGC,需要校准的传感器如下:

具体校准细则请查看传感器自检与校准
-
如果做无人机室内测试,需要在地面站修改参数EKF2_AID_MASK,EKF2_HGT_MODE,详细操作如下:
首先点击参数(Parameters)按钮,进入参数修改界面,如下。

-
在search栏输入aid,选择EKF2_AID_MASK参数

在窗口右上侧会弹出子页面,如下图所示。

-
一般默认选择第一项use GPS,由于我们室内飞行使用的是视觉作为位置定位源,所以需将此参数改为4、5项,修改后保存。
在search栏输入hgt,选择EKF2_HGT_MODE参数栏

-
在窗口右上弹出的子页面上,点击下拉菜单,选择vision,如下图所示

在执行飞行之前,都需要检查参数和检查飞机桨叶是否上紧,检查螺丝是否有松动。一般传感器参数我们都会调整好,但运输过程可能会对飞机产生影响。这时就需要自己调整参数。调整完,记得重启飞控。
最后保存退出,记得重启飞控。
至此 那么我们已经做完了飞行前的所有工作,接下来我们就可以进行定点和指点飞行。