本小节主要介绍在飞行前的RTK如何准备,以及如何将RTK地面端的RTCM数据通过通信链路发送至RTK移动端
RTK连接视频
RTK连线图
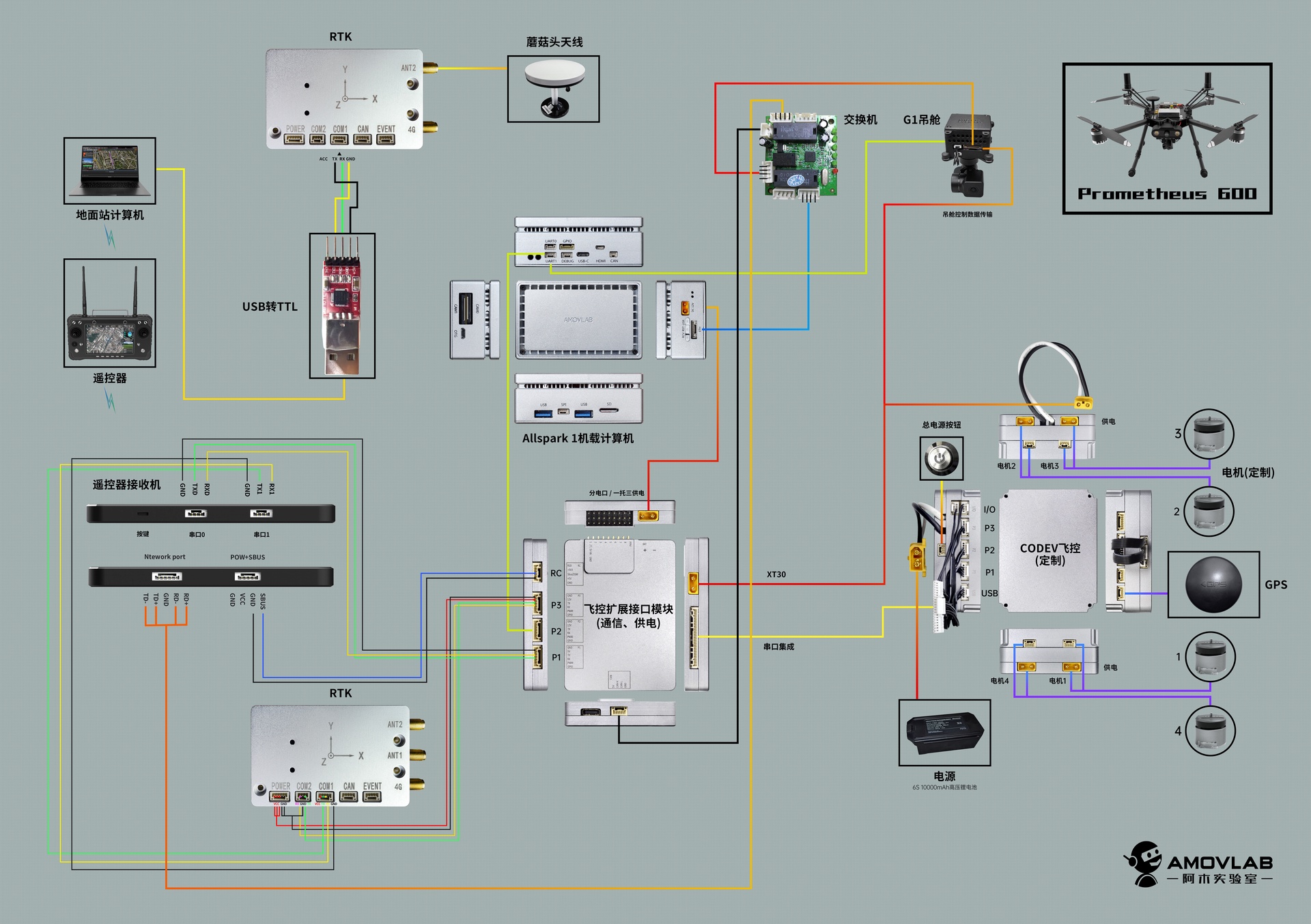
- 图中左下方RTK为RTK移动端的供电和串口数据输出,连接至图中飞控扩展版的P3接口.
- 图中左下方RTK的COM1口为RTK移动端接收RTCM数据串口,连接至图中遥控器接收机R16的串口1上
- 图中左上方RTK为RTK地面端,最左边的POWER是供电接口,供电需用3S 4000mAh电池供电
- 图中左上方RTK为RTK地面端,第三个COM1口是输出RTCM数据串口,连接至图中USB转TTL上,TTL连接至地面站电脑,地面站电脑运行串口转发工具的应用程序将RTK地面端输出的RTCM数据通过通信链路H16遥控器和R16接收机发送至图中R16的串口.
- 遥控器H16要与地面站电脑进行组网通信,可以通过设置H16为热点模式,地面站电脑通过WiFi成功连接到H16链路之内。
RTK连接H16说明
准备
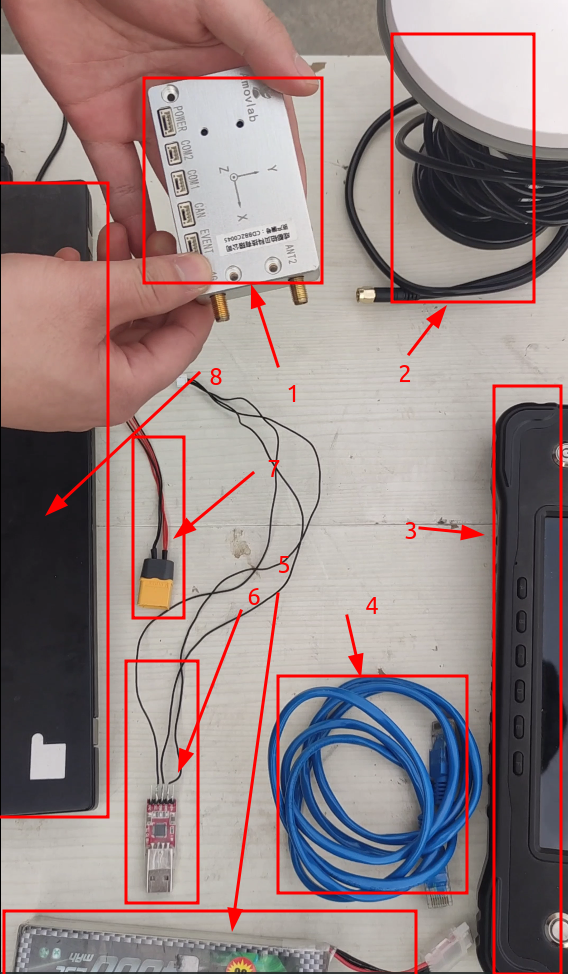
- 一个 RTK地面端
- 一个蘑菇头天线
- 一台电量充足的H16遥控器
- 一根网线
- 一块充满电的 3S 4000mAh 锂电池
- 一个USB转TTL模块以及连接线
- 一根RTK地面端供电线
- 一台装有PrometheusGroundStation-Pro的Ubuntu电脑(如果不进行进阶飞行,可忽略)
接线连接
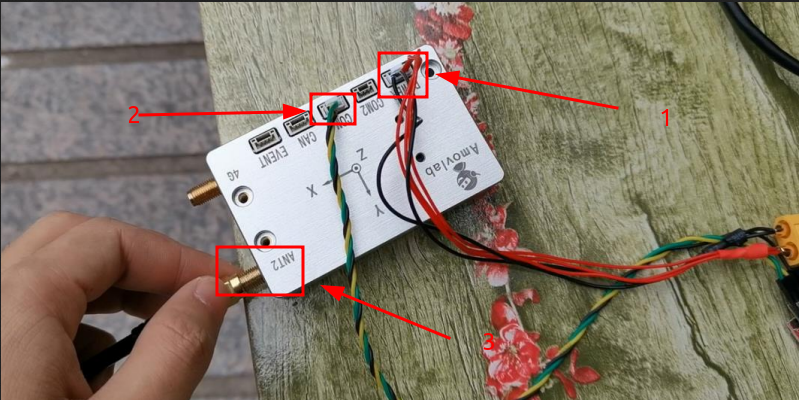
- RTK地面端供电线连接至RTK地面端
POWER口 - 将TTL通过连接线接到RTK地面端
COM1口 - 将蘑菇头GNSS天线馈线连接到RTK地面端
ANT2口

- 如上图,蘑菇头天线放至空旷场地且没有干扰的地方,若能架高效果最好。
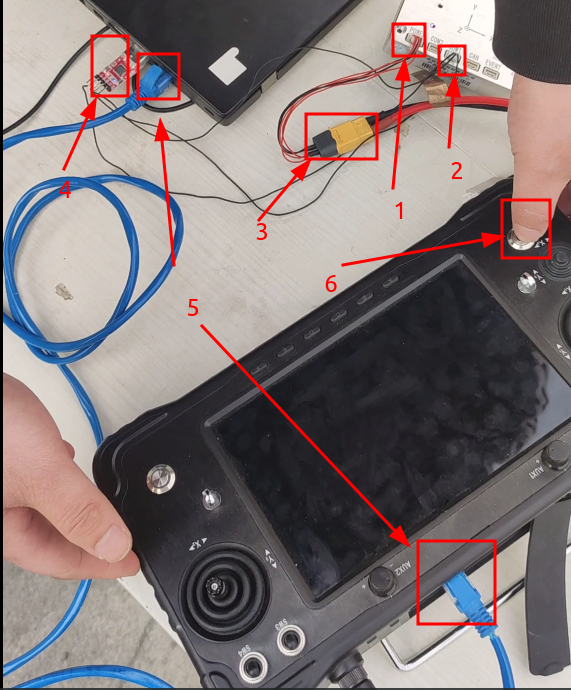
- RTK地面端供电线连接至RTK地面端
POWER口 - 将TTL通过连接线接到RTK地面端
COM1口 - 给RTK地面端上电。
- 将TTL USB接口连接至Ubuntu电脑USB接口
- 网线连接H16遥控器和Ubuntu电脑
- 长按电源键开机
Ubuntu电脑配置串口转发:
我们使用PrometheusGroundStation-Pro,配置串口转发。
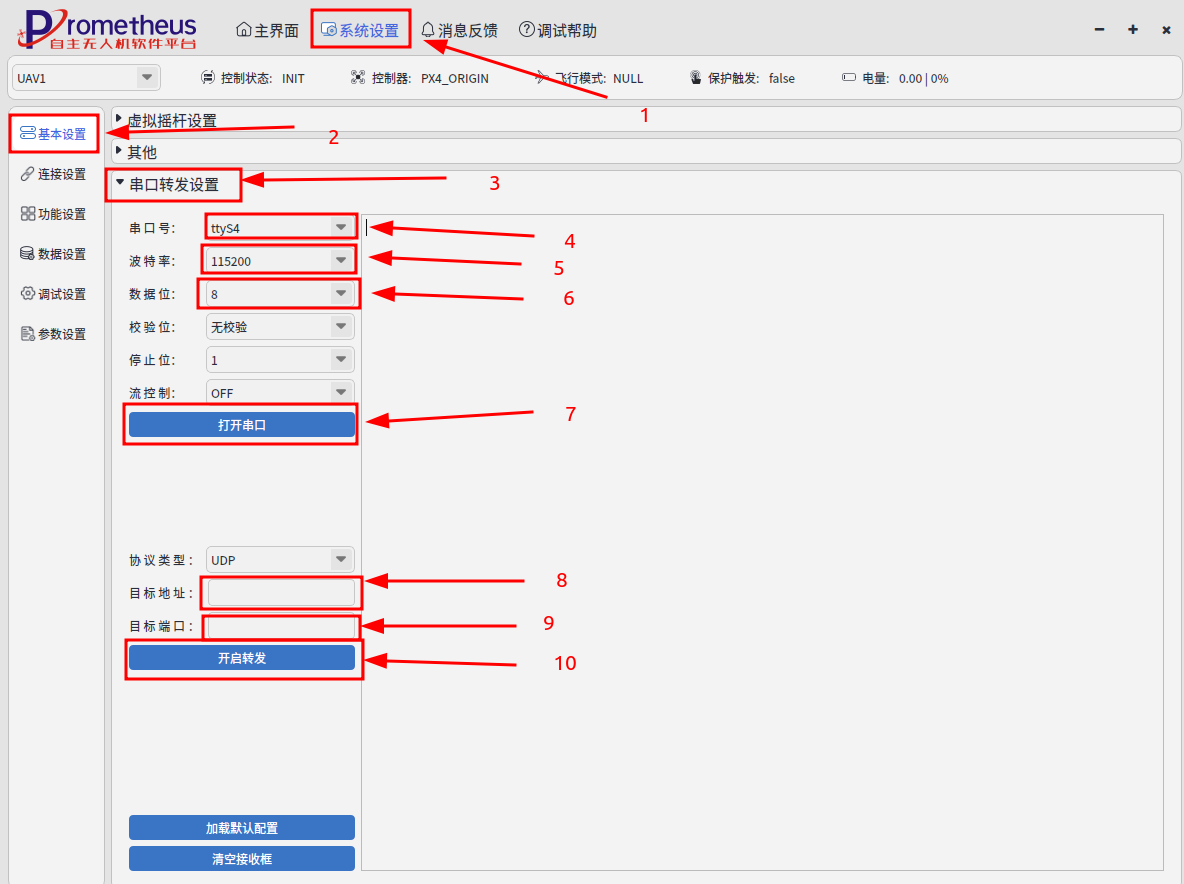
- 点击系统设置。
- 点击基本设置。
- 点击串口转发设置。
- 串口号选择(选择插上串口转发之后自动识别新增的那个串口号)
- 波特率选择
115200 - 数据位选择
8,其它默认即可。 - 点击打开串口,右侧开始出现乱码数据,表示正常打开(未出现数据则需要检查之前的配置或硬件)
- 目标IP地址为R16接收机的IP地址
192.168.144.11 - 目标端口为R16接收机串口 1 的UDP端口,端口为
13552 - 如果成功导入配置文件,也可点击下方加载默认配置,并选择正确串口
查看RTK Fixed
连接QGC请查看准备通信链路-H16遥控器图数传一体通信链路小节。
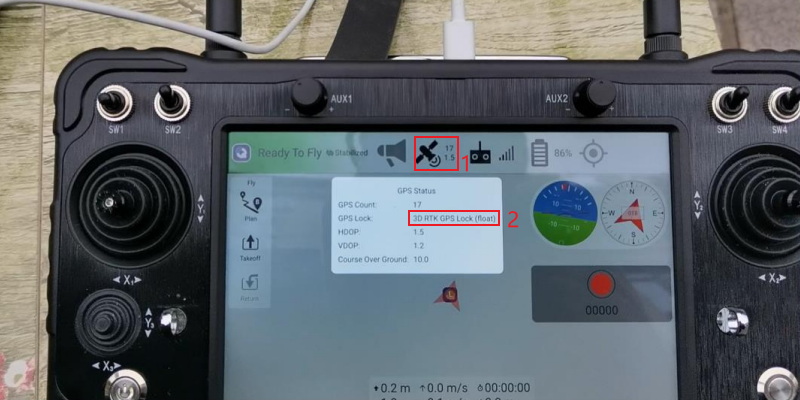
- 成功连接QGC之后,进入飞行界面,选中1 查看GPS 状态
- 查看GPS Lock数据,如图中2所示,进入RTK Fixed状态,说明已经成功进入RTK(图中所示为RTK float状态,属于浮点解;如果为RTK Fixed状态,属于窄巷固定解)
至此RTK在H16通信链路下成功正常使用