本小节主要讲解使用Prometheus地面站-Pro实现圆X降落实验,本次实验需要提前准备好道具,需要提前打印圆X,贴在降落板上。
-
圆叉板准备:
- 拿出开箱配件打印有圆叉符号的纸
- 准备一块大小大于等于圆叉纸的木板(平整坚固的板子均可)
- 将圆叉纸粘在板子上即可
-
在进行以下操作之前给无人机上电
连接过程
断开连接
在连接之前,请使用地面站关闭连接,详细可参考Prometheus地面站-Pro断开连接
断开连接的目的是Kill上一次功能运行的全部节点,方便新节点运行。
重新连接
关闭之后,重新连接,详细可参考Prometheus地面站-Pro连接
图像拉流
推流可参考链接:开启视频推流 ,此处我们需要拉原始图像,图像推流端口为 8554,图像拉流内核选择其一,此处选择ffmpeg。
 4. 修改为
4. 修改为 8554
5. 选择 ffmpeg
回到主界面,出现图像,说明节点正常启动正常,准备圆X降落飞行实验。(如果没有出现图像可以双击左下角的播放,或者断开连接重新拉流)
启动圆X降落相关节点

- 点击进入导航栏中调试帮助界面
- 点击circle x按钮,启动圆X降落相关节点。
启动吊舱circle x按钮之后,此时如果监控机载计算机,可以发现圆X降落相关节点已经启动,监控机载计算机详细请查看监控机载计算机
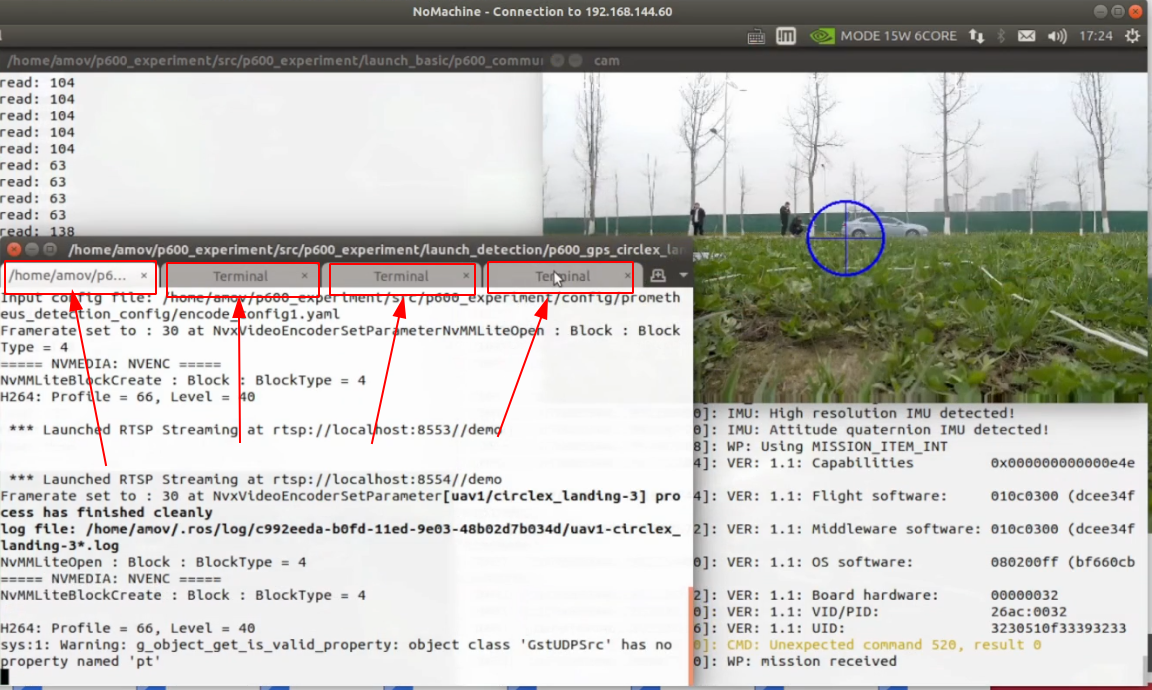
监控机载计算机这边的启动过程,点击circle x后,就会自动启动圆X降落相关节点,出现如下图所示的四个终端:
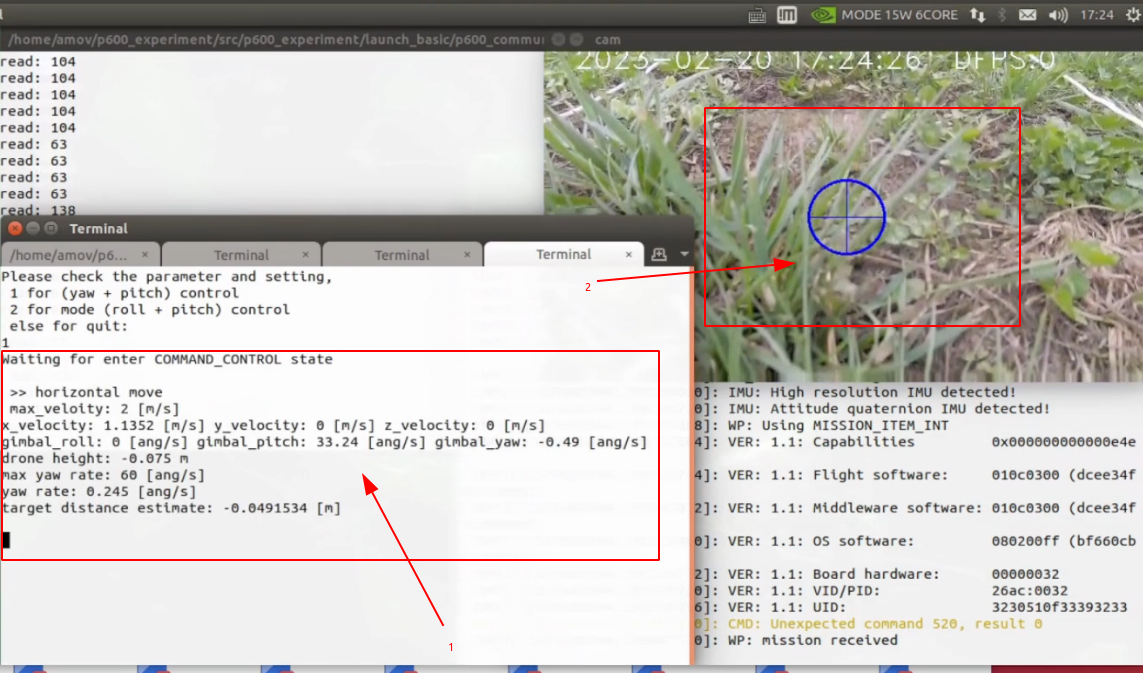
找到如下图第四个终端所示的界面,输入1(控制吊舱摄像头角度向下45°),出现下图 1 所示的信息,则启动完成,如下图所示,至此就可以使用Prometheus地面站-Pro进行圆X降落飞行实验。
圆X降落飞行实验
- 点击 系统设置
- 点击 基本设置
- 点击 其他设置
- 修改 IP为 :
8554/demo - 选择
ffmpeg - 点击 保存

- 点击 系统设置
- 点击 连接设置
- 点击 断开连接,会结束不相关的节点。
- 将遥控器SW1、SW2、SW3、SW4全部拨到最上方
- 等待几秒,点击 连接

- 点击 调试帮助
- 点击 circle,启动圆叉降落节点

- 点击 主界面
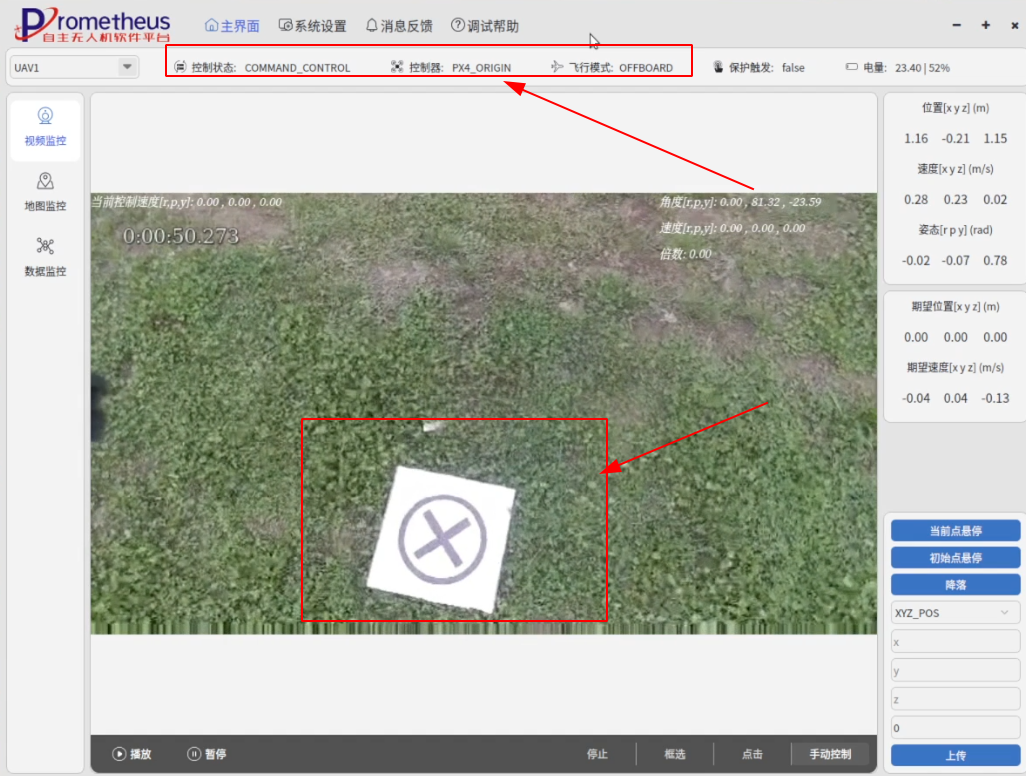
- 点击 视频监控,会出现上图所示画面(若没有出现画面,可以切换图像拉流内核并保存再回到主界面点击左下角播放,或者断开连接,重新启动节点)
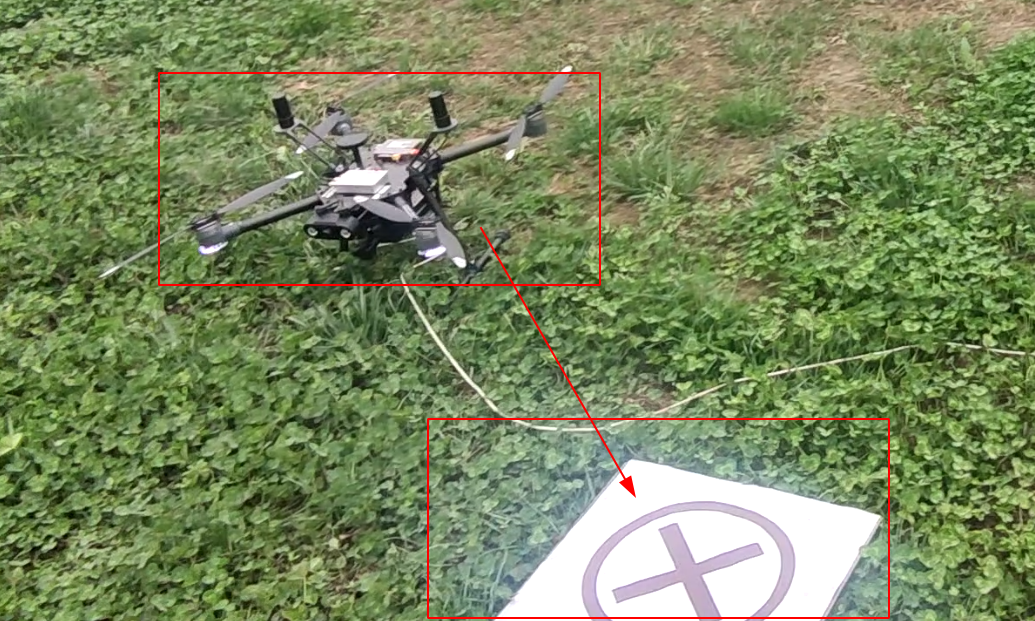
放置圆叉板位置如下图所示:
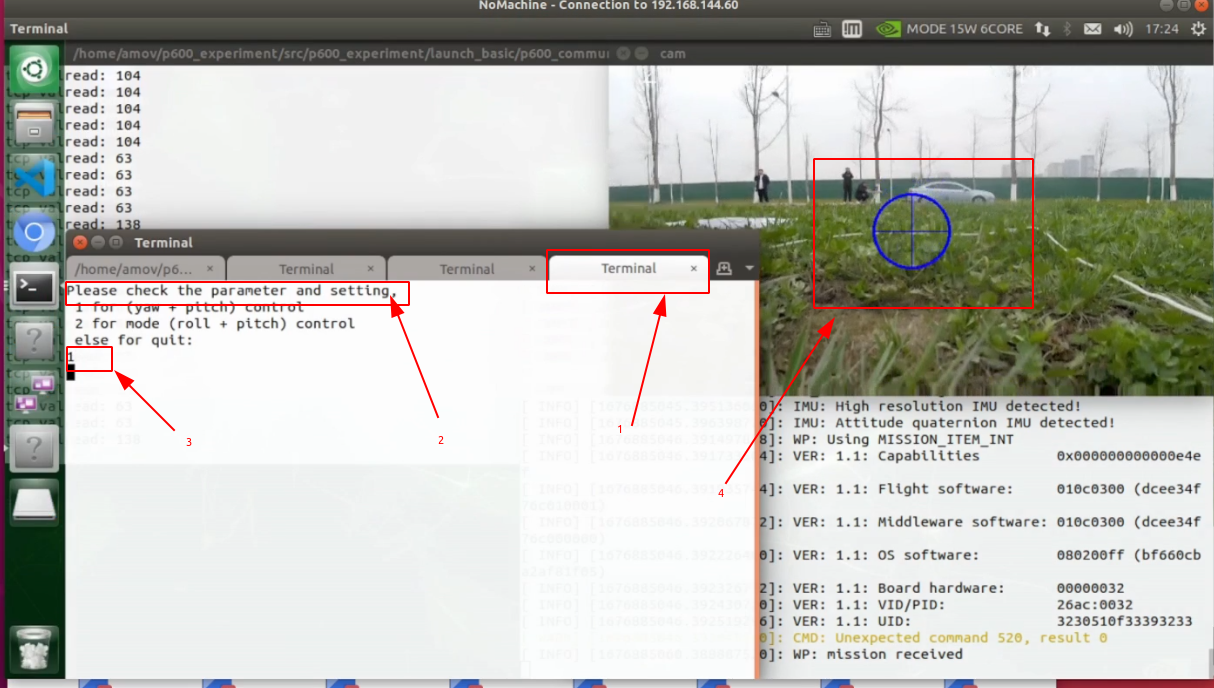
- nomachine 连接机载电脑端,如上图所示
- 在终端中找到如 上图 2 所示功能界面
- 输入 1 ,回车 ,切换视角为向下45度
- 是吊舱默认水平视角
- 如上图所示,为设置成功界面
- 视角成功切换为向下45度

- 拨动SW1到最下方,解锁无人机。拨动SW2到中间位置,控制无人机起飞一定高度。
- 起飞后,圆叉板出现在左视角
- 控制摄像头,将圆叉板移入到视角中央,如下图所示:

切换SW2到最下方,不再操控H16遥控器,控制状态进入COMMAND_CONTROL,如下图所示:

至此,无人机自动识别圆叉板,自动降落。