本小节主要讲解在飞行前的准备,主要包括上电,连接QGC地面站,飞行前检查
上电
- 开启飞行器
- 开启电源:短按飞行器电源按钮,开启电源后四个电机下LED灯亮起
- 关闭电源:长按飞行器电源按钮,关闭电源后四个电机下LED灯熄灭
- 开启遥控器
- 检查电量:短按遥控器电源按钮,显示遥控器电量百分比
- 遥控器开机:长按遥控器电源按钮,遥控器开机进入主界面
- 遥控器关机:长按遥控器电源按钮,弹出选项,点击关机,遥控器进入关机界面
连接QGC地面站
- 连接QGC请查看准备通信链路-H16遥控器图数传一体通信链路小节。
飞行前检查
- 将飞行器放置于户外平整开阔地带,确保周围无障碍物、建筑物、树木等,飞手距离飞行器5米并面朝机尾。

- 检查电池电量并安装电池。
- 检查飞机外观是否完整,无明显碰撞或异常。
- 安全绳子是否准备就绪。

- 确保飞行器云台相机超前。
- 确保遥控器天线已展开。

- 开启遥控器,确保遥控器所有挡位恢复到默认设置挡位,开启飞行器,并检查遥控器状态栏信号强度标识已经和飞行器接收机成功对频,且具有飞行器控制权。
- 连接至QGC地面站,进入飞行界面,查看卫星数量、飞行模式、电池电量、遥控器设置、飞行模式设置等飞行相关参数;以确保参数设置或着参数校准符合自身需求,保证飞行安全。

- 若多架飞行器同时实验,请划分空域飞行,避免空中相撞,引发严重安全事故。
RTK数据纠偏
注意:只有当无人机未解锁时才能执行此操作!
- 进入设置界面,打开分析工具
Analyze Tools,数据流查看MAVLink Inspector,点击ALTITUDE高度查看。
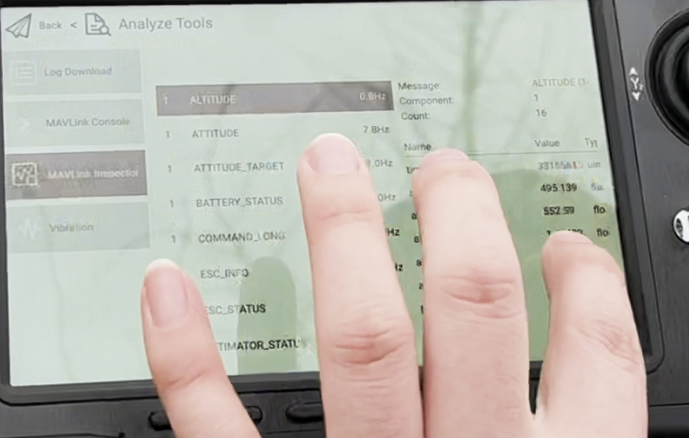
查看本地高度 altitude_local,显示为1.6米左右,是无人机认为自己所在的高度,然而真实相对高度 altitude_relative为0.01。
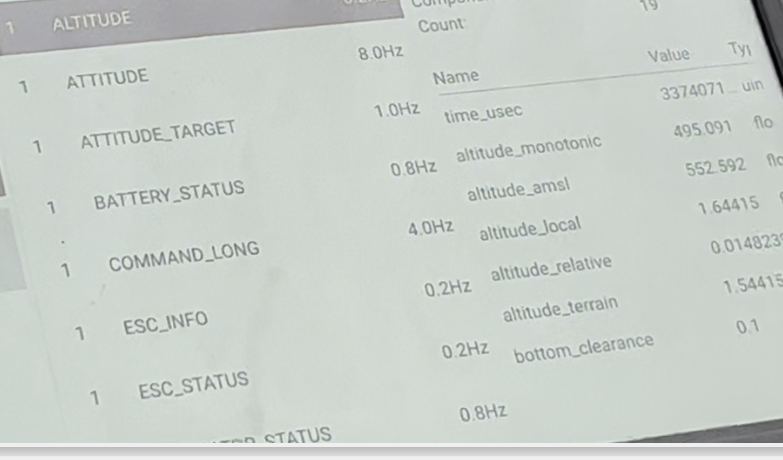
因为刚开始的RTK数据并没有传入进行纠偏,导致高度数据的Z轴数据误差很大,需要进行数据纠偏。
在当前分析工具页面,进入 MAVLink Console,点击 Enter Commants here
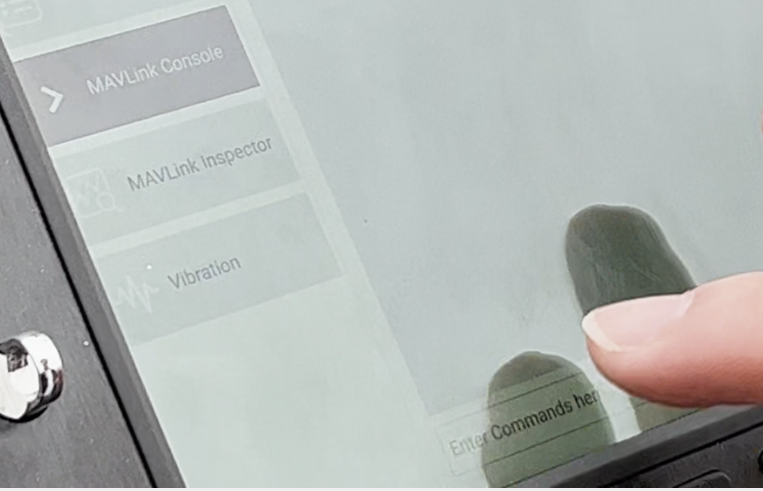
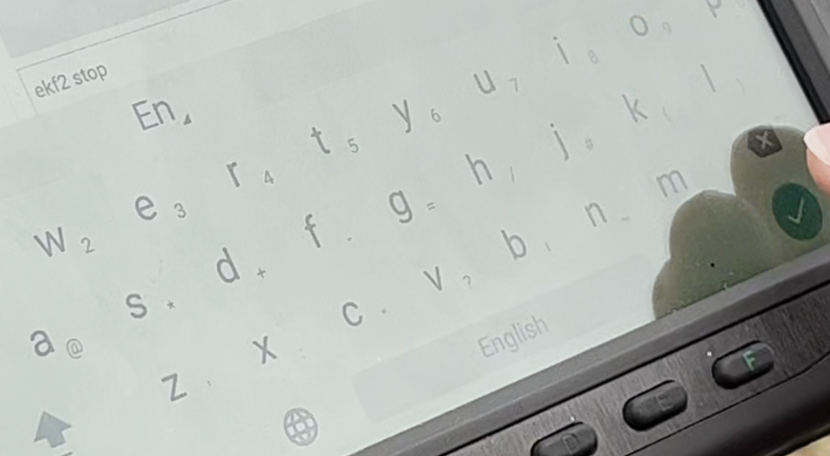
输入 ekf2 stop,发送,会使无人机的融合数据算法失效(此时无人机没有融合到数据会发出滴滴滴的警报声,后面会介绍如何解除警报),然后输入 ekf2 start,发送,则启用融合数据算法。
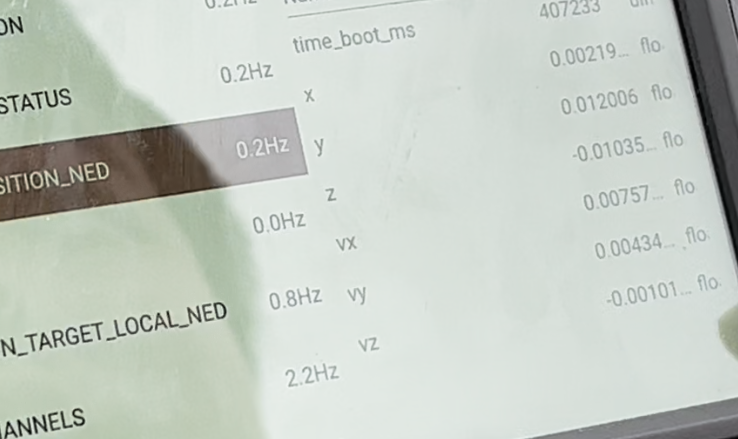
在当前分析工具页面,再次进入 MAVLink Inspector ,查看是否初始化本地的 LOCAL_POSITION_NED 数据,等待 LOCAL_POSITION_NED 出现数据
观察纠偏后的X、Y、Z数据是否在0附近
解除报警
左摇杆拨到右下角解锁无人机,滴滴滴滴的警报声随之消除。
