一键启动
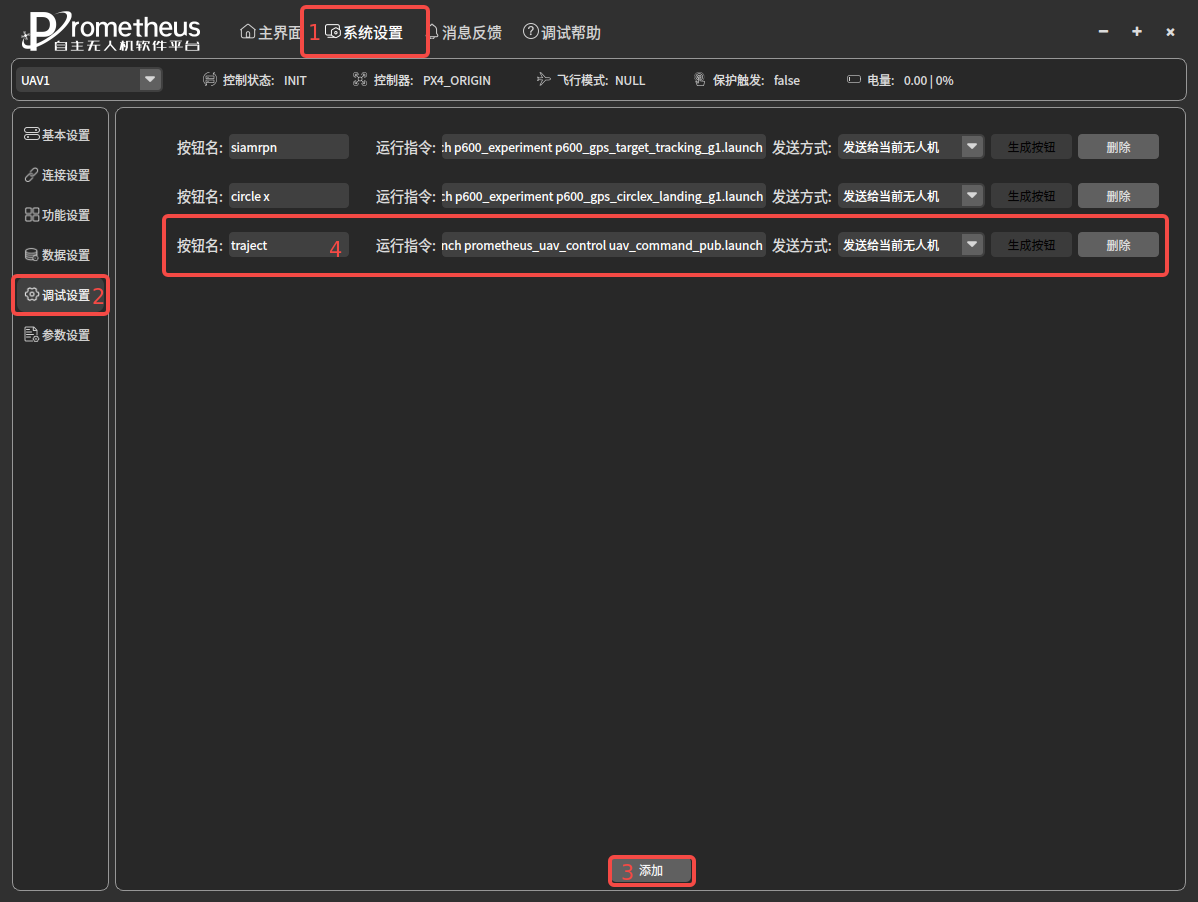
步骤4输入数据,其中运行指令输入roslaunch指令或者脚本文件(shell脚本 .sh文件)可直接填写,如果需要输入其他指令,可以参考如下指令:
# gnome-terminal -- 运行指令
# 如下面这个指令,关闭除了主节点和通信节点的其他节点。
gnome-terminal -- rosnode kill ‘rosnode list | grep -v /communication_bridge | grep -v /rosout’
然后点击生成按钮,会在调试帮助中的自定义demo中生成对应的按钮,可以通过选择发送方式选择全部无人机启动,也可以通过删除按钮删除该按钮,如下图所示。
