1.
软件简介
2.
准备工作
3.
功能介绍
4.
界面说明
❱
4.1.
主界面
❱
4.1.1.
视频监控
4.1.2.
地图监控
❱
4.1.2.1.
百度地图
4.1.2.2.
平面地图
4.1.3.
数据监控
4.1.4.
集群控制
4.1.5.
RVIZ
4.2.
系统设置
❱
4.2.1.
基本设置
❱
4.2.1.1.
虚拟摇杆设置
4.2.1.2.
其他
4.2.1.3.
串口转发设置
4.2.2.
连接设置
4.2.3.
功能设置
❱
4.2.3.1.
集群设置
4.2.3.2.
吊舱设置
4.2.4.
数据设置
4.2.5.
调试设置
4.2.6.
参数设置
❱
4.2.6.1.
控制模块
4.2.6.2.
通信模块
4.2.6.3.
集群模块
4.2.6.4.
轨迹控制
4.3.
消息反馈
4.4.
调试帮助
5.
使用手册
❱
5.1.
连接无人机
❱
5.1.1.
地面站添加无人机
5.1.2.
参数检查修改
5.1.3.
启动通信节点
5.1.4.
地面站连接无人机
5.1.5.
地面站断开无人机
5.2.
单机控制
❱
5.2.1.
启动控制节点
5.2.2.
地面站操作
❱
5.2.2.1.
轨迹控制
5.2.2.2.
经纬高控制
5.3.
集群控制
5.4.
视频流拉取
5.5.
吊舱控制
5.6.
百度地图
5.7.
平面地图
5.8.
虚拟摇杆
5.9.
ROS参数读写
5.10.
一键启动
5.11.
其他设置
5.12.
RVIZ
5.13.
串口转发
5.14.
图像操作
6.
常见问题
7.
更新记录
Light (default)
Rust
Coal
Navy
Ayu
-
+
PrometheusGroundStation-Pro使用手册
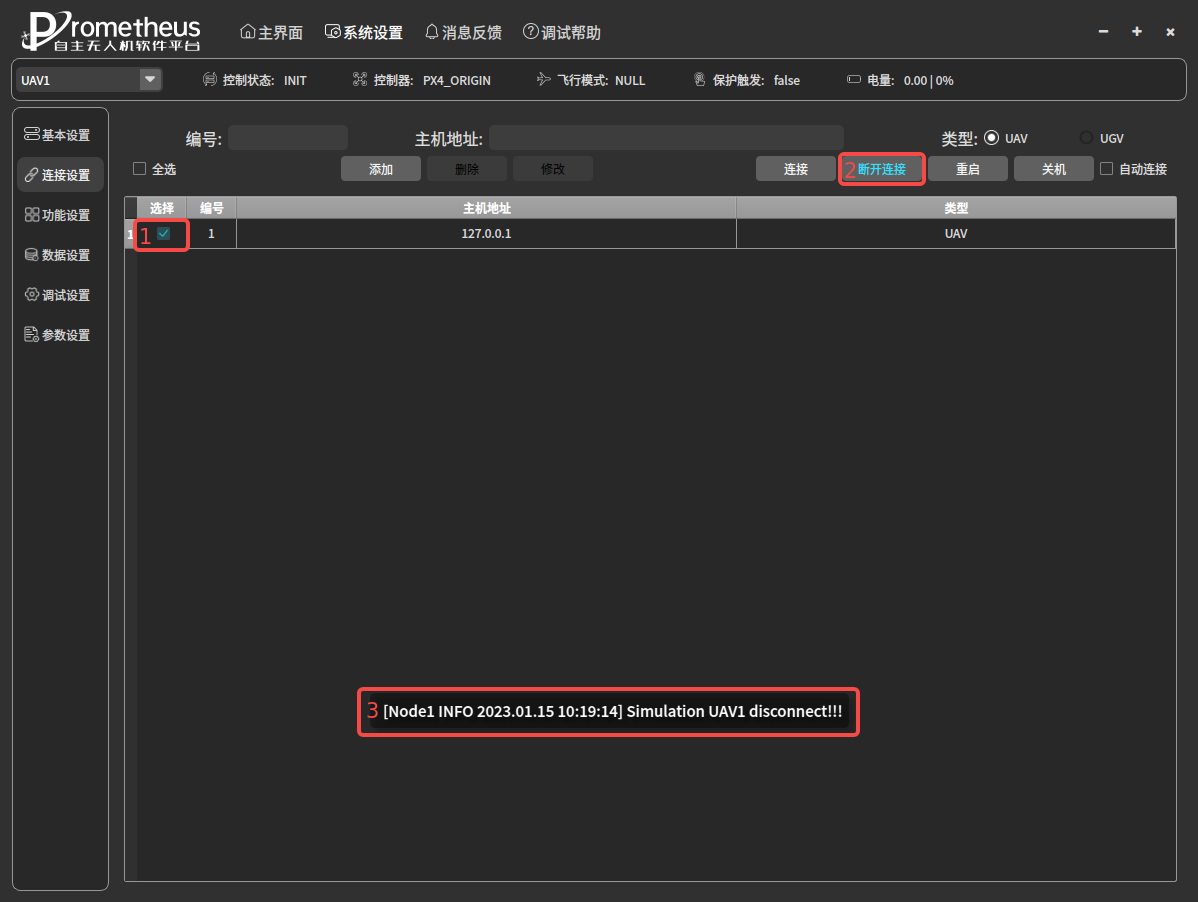
地面站断开无人机
按上述步骤操作即可,下面简单介绍步骤流程:
选择 要断开连接的无人机。
点击 断开连接,此时如果参数开启了自动启动(autoload设置为true),会启动单机关闭脚本(close_uav_control参数设置的值)。
消息反馈反馈断开连接成功。