虚拟摇杆设置
提示
虚拟摇杆是通过调用Prometheus中的XYZ_VEL_BODY(机体系速度控制)接口实现,所以机头方向为x轴。
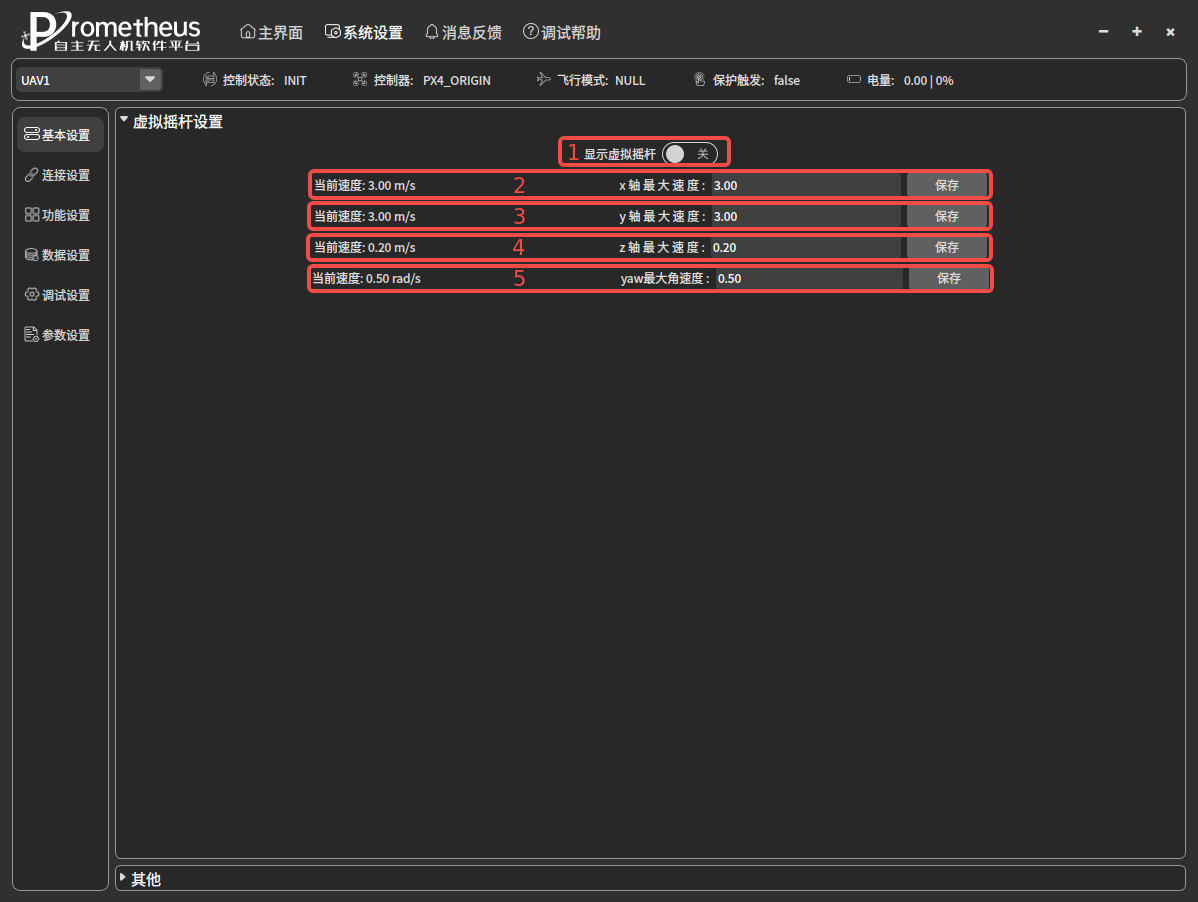
上图中标注介绍如下:
- 标注1:是否开启虚拟摇杆,开启后会在主界面中的视频监控界面显示。
- 标注2:查看虚拟摇杆的x轴最大速度,以及设置x轴最大速度。
- 标注3:查看虚拟摇杆的y轴最大速度,以及设置y轴最大速度。
- 标注4:查看虚拟摇杆的z轴最大速度,以及设置z轴最大速度。
- 标注5:查看虚拟摇杆的yaw最大角速度,以及设置yaw最大角速度。
提示
虚拟摇杆是通过调用Prometheus中的XYZ_VEL_BODY(机体系速度控制)接口实现,所以机头方向为x轴。
上图中标注介绍如下: