轨迹控制
注意
该控制接口需要配合uav_command_pub节点使用。
参数修改
按上述步骤操作即可,下面简单介绍步骤流程:
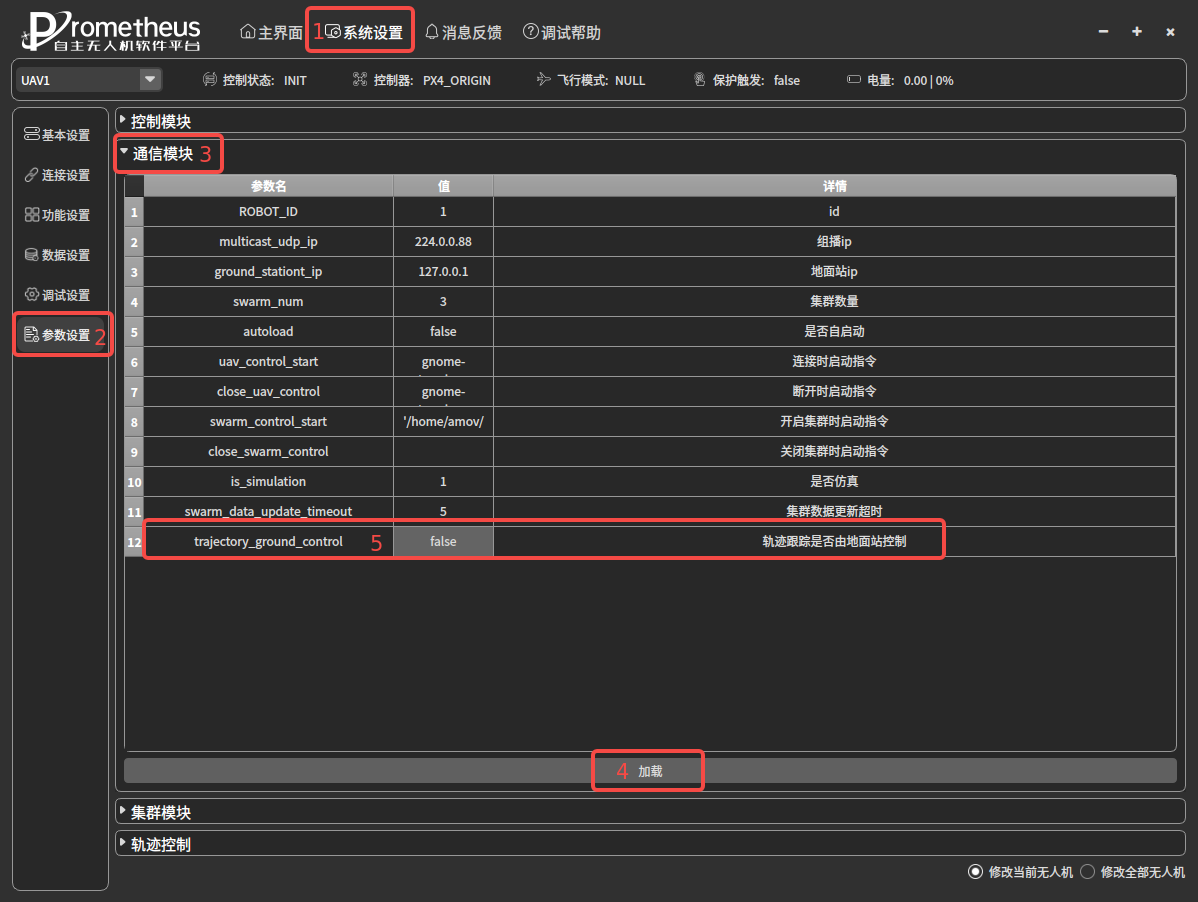
- 点击 系统设置,切换到系统设置界面。
- 点击 参数设置,切换参数设置界面。
- 点击 通信模块,切换通信模块参数显示界面。
- 点击 加载,加载机载端参数,加载完成后,会通过消息反馈进行提示,如果没有提示请检查数据链路(组网)情况或通信节点是否正常启动。
- 选择 参数trajectory_ground_control的值,修改为ture,收到打印成功的消息反馈后表示修改成。(也可以直接去修改通信节点的launch文件,这里就不详细介绍了)
注意
如果需要修改轨迹控制中圆心、速度等,可以在参数设置中加载轨迹控制参数进行调整,操作基本大同小异,这里就不详细介绍了。
启动轨迹控制节点
提示
可以用两种方式启动,一种是手动启动,另一种是地面站启动;建议使用地面站启动。
手动启动
通过打开终端,输入下方指令:
roslaunch prometheus_uav_control uav_command_pub.launch
地面站启动
通过自定义一个按钮,将轨迹控制节点的命令封装,正常关闭后会自动保存到配置文件,再次打开依旧存在,可反复使用。
按上述步骤操作即可,下面简单介绍步骤流程:
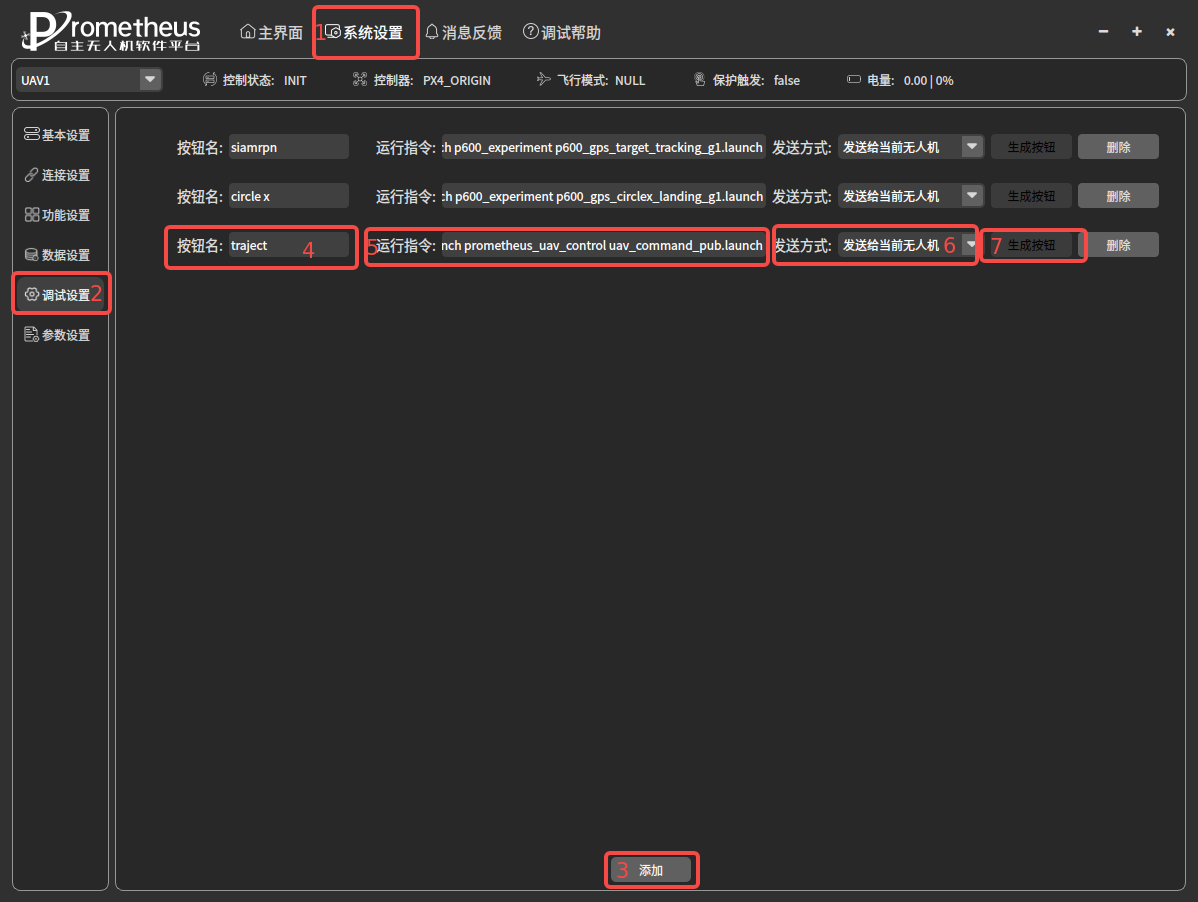
- 点击 系统设置,切换到系统设置界面。
- 点击 调试设置,切换调试设置界面。
- 点击 添加按钮。
- 在最新生成的区域中填写要生成按钮的名字(traject)。
- 填写运行指令(roslaunch prometheus_uav_control uav_command_pub.launch)。
- 发送方式选择。
- 最后点击生成按钮。
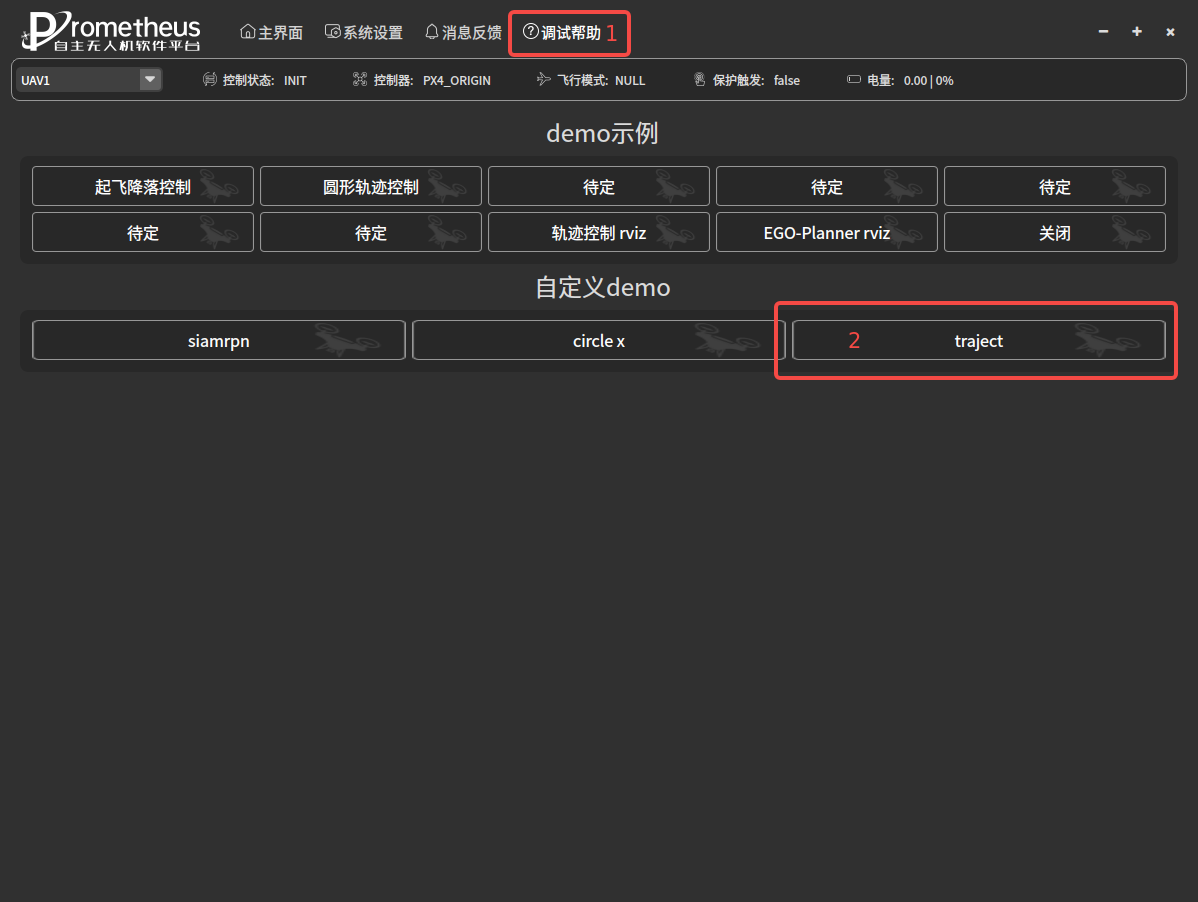
上述操作完成后,可以在调试帮助界面中查看生成按钮,进行如下操作:
按上述步骤操作即可,下面简单介绍步骤流程:
- 点击 调试帮助,切换到调试帮助界面。
- 点击刚才生成的按钮 traject,启动轨迹控制节点。
输入控制量
上述操作完成后,跳转回主界面:

按上述步骤操作即可,下面简单介绍步骤流程:
- 下拉框选择轨迹控制模式。
- 下拉框选择轨迹控制中,绕圆移动、绕8移动、前后移动以及左右移动选择一种。
- 输入框输入持续的时间。
- 点击上传按钮,开始执行任务。