虚拟摇杆
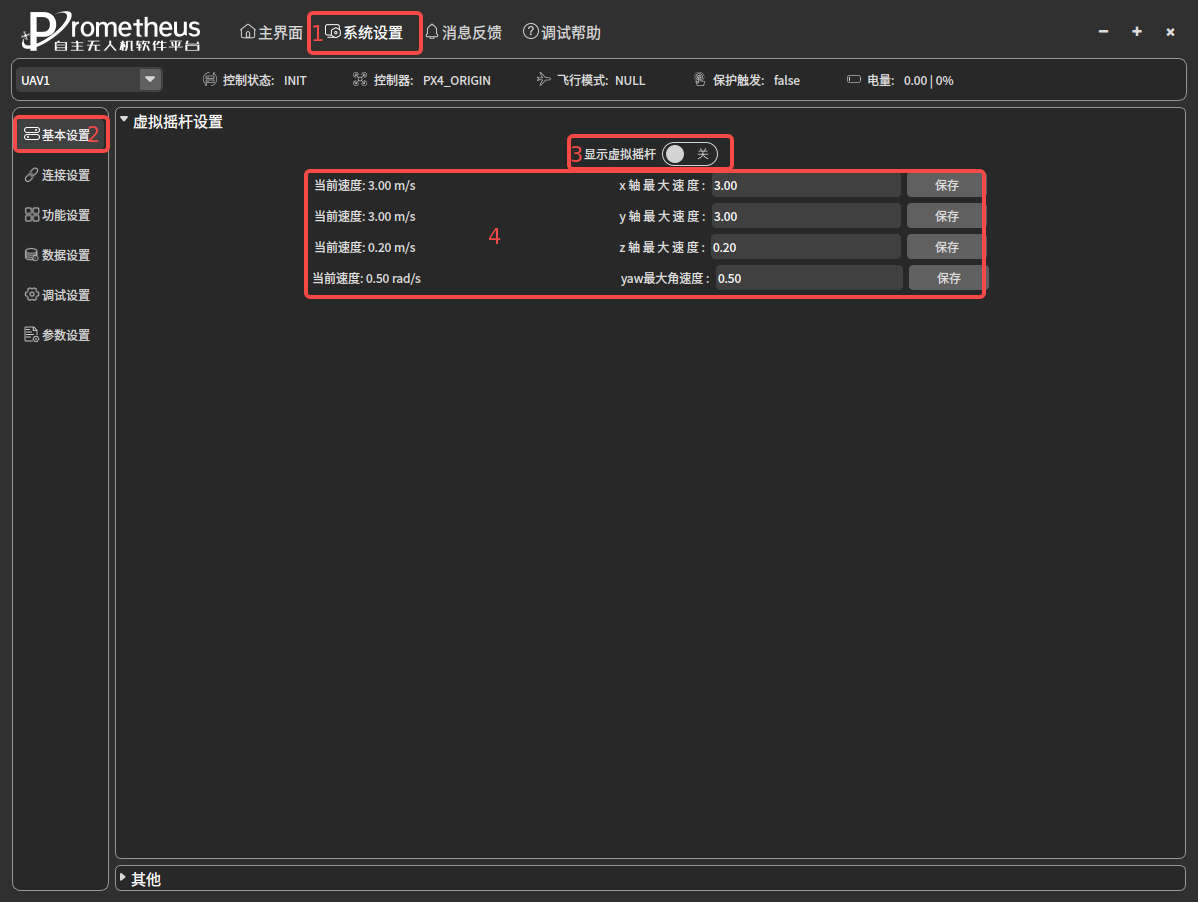
根据上述步骤打开虚拟摇杆,同时设置各轴以及偏航的最大速度(默认为0)。
目前仅支持拉流内核为gsteramer才可使用,所以还需要进入其他选择gsteramer拉流,然后返回主界面。
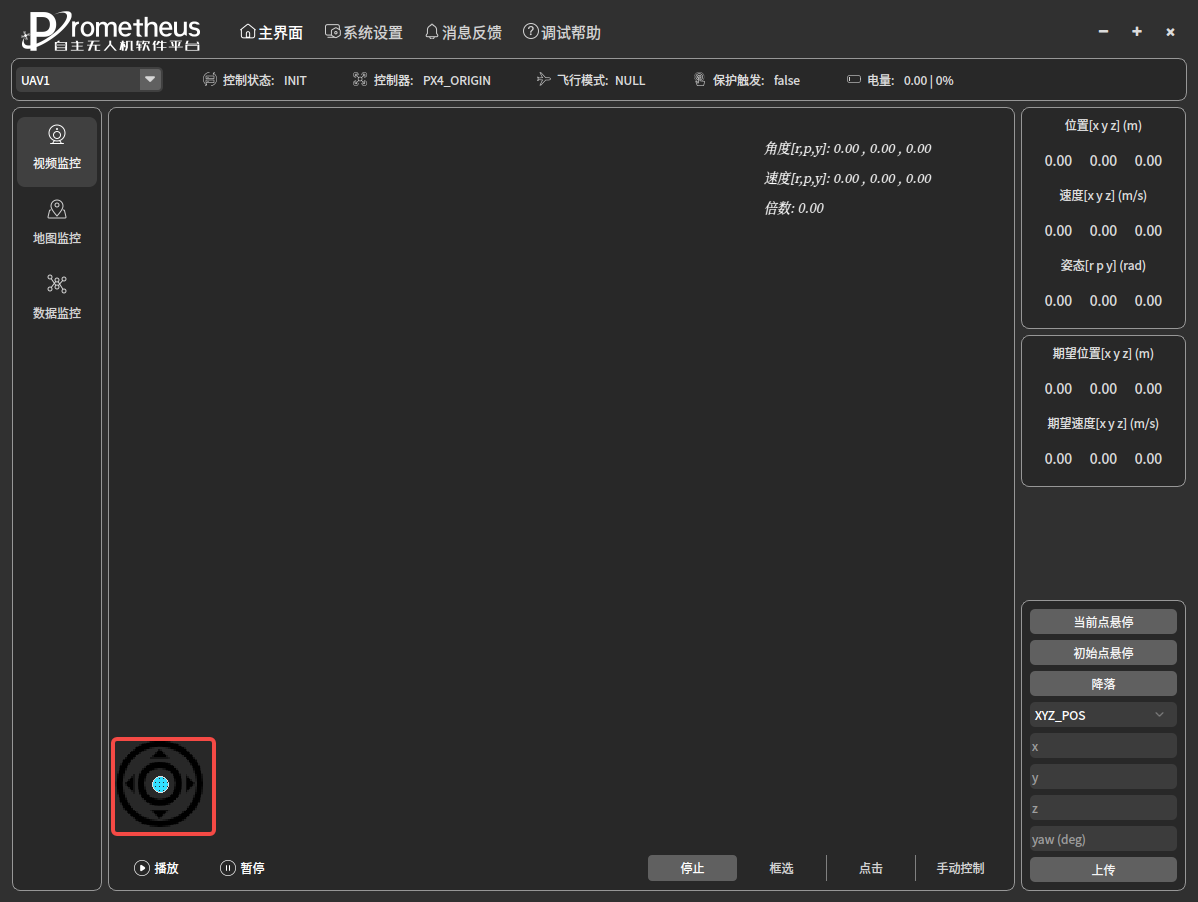
虚拟摇杆可以使用鼠标控制以及键盘控制(需要焦点在虚拟摇杆上,点击一下虚拟摇杆即可)。
鼠标控制
- 鼠标左键按下,上下左右拖动控制无人机前后左右移动。
- 鼠标右键按下,上下控制无人机的z轴高度,左右控制无人机偏航。
- 鼠标释放,停止无人机移动。
键盘控制
- 键盘上下左右控制无人机前后左右移动。
- 键盘shift+上下控制无人机z轴高度,shift+左右控制无人机偏航。
- 键盘home按钮回到初始点悬停。
虚拟摇杆主要使用机体系-速度控制(XYZ_VEL_BODY),所以无人机前为机头方向。