平面地图
该小节讲述地面站平面地图功能的使用。
显示期望位置
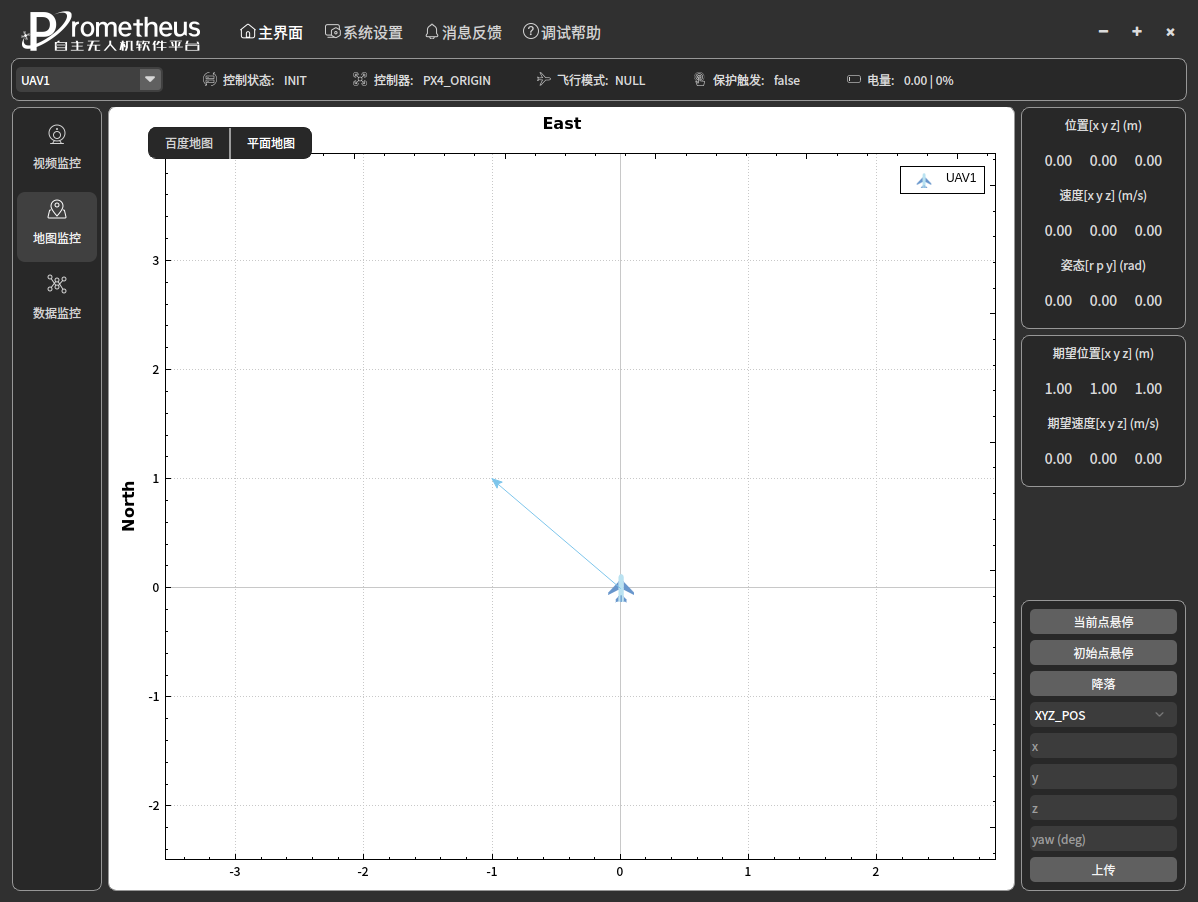
上图中蓝色箭头指向位置即为期望位置。
注意
因为平面地图,本质上是一个散点图,所以坐标轴左负右正;而无人机的坐标轴与之相反,所以会进行一个转换,以无人机为准,上下为x轴,左右为y轴(且左为正)。图上为期望位置(1,1,1)。
设置到达距离以及到达时间
一般而言,默认时间为3s,距离0.5m,这意味着当无人机进入目标点0.5m内,一旦超过3s即表明到达目标点,然后将目标线路箭头删除。
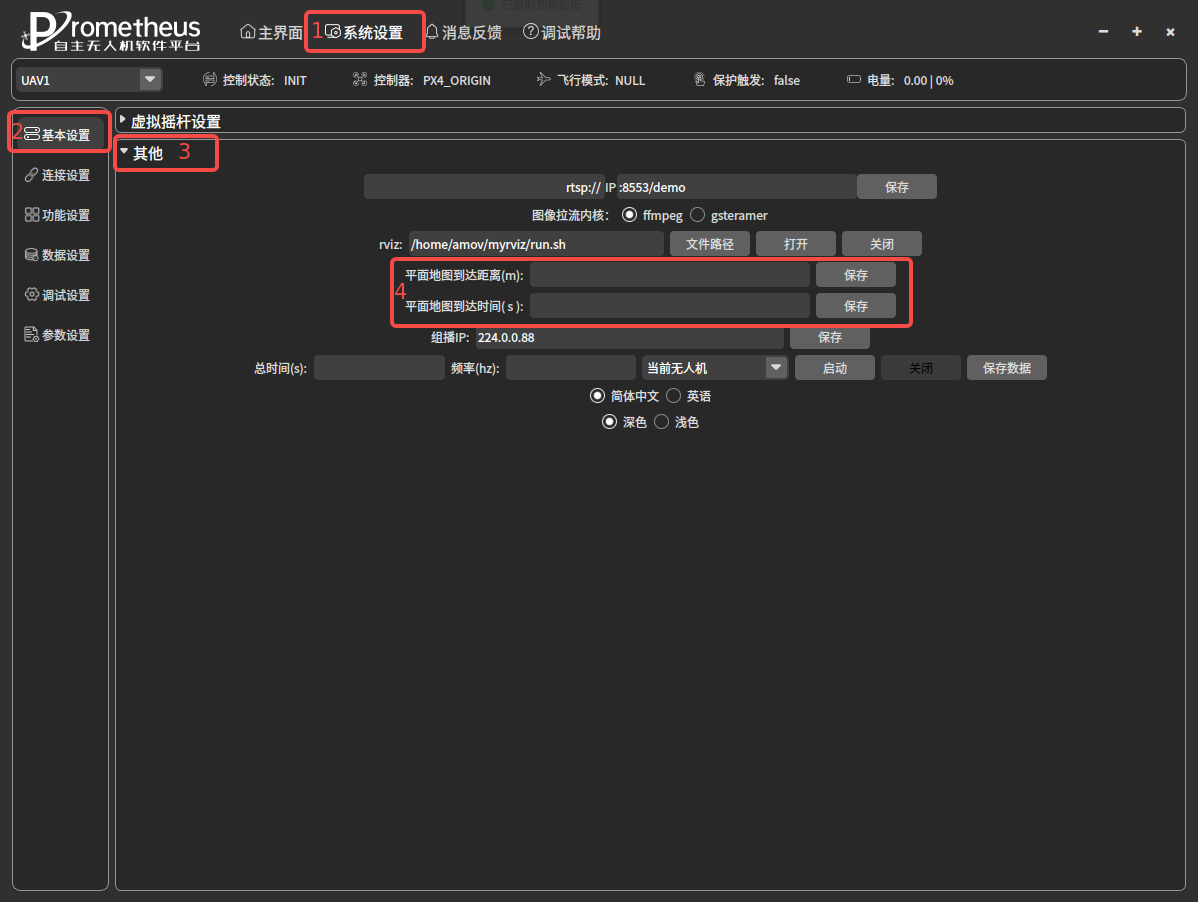
根据上述步骤即可设置到达距离以及时间。
平面地图到达距离:即无人机到达目标点多远距离判断其到达。
平面地图到达时间:即无人机到达平面地图到达距离内多长时间为到达,到达后目标线消失。
打点以及生成xlsx文件
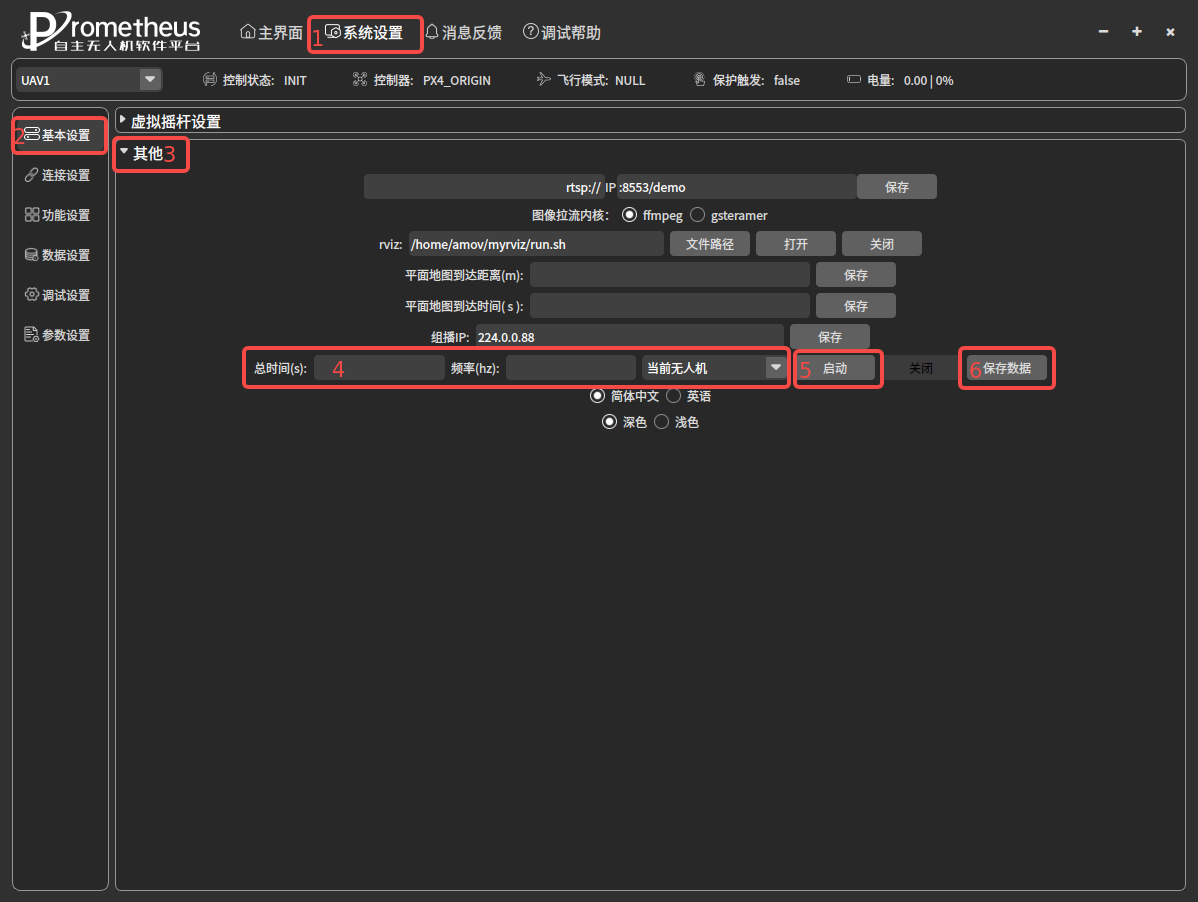
前三步骤基本一致,步骤4输入打点的总时间以及频率,还有是否打印全部无人机或者选择打印当前无人机。步骤4输入完成后。点击步骤5即可跳转到平面地图查看打点详情,然后可以返回点击保存位置数数据生成xlsx文件(建议打点完成后在点击)。如果需要消除掉打点轨迹,点击关闭按钮即可,但是需要注意,点击关闭后将无法保存位置数据。
集群模式下选择打印全部无人机,点击保存数据时会将全部无人机位置数据存在一张xlsx表中。
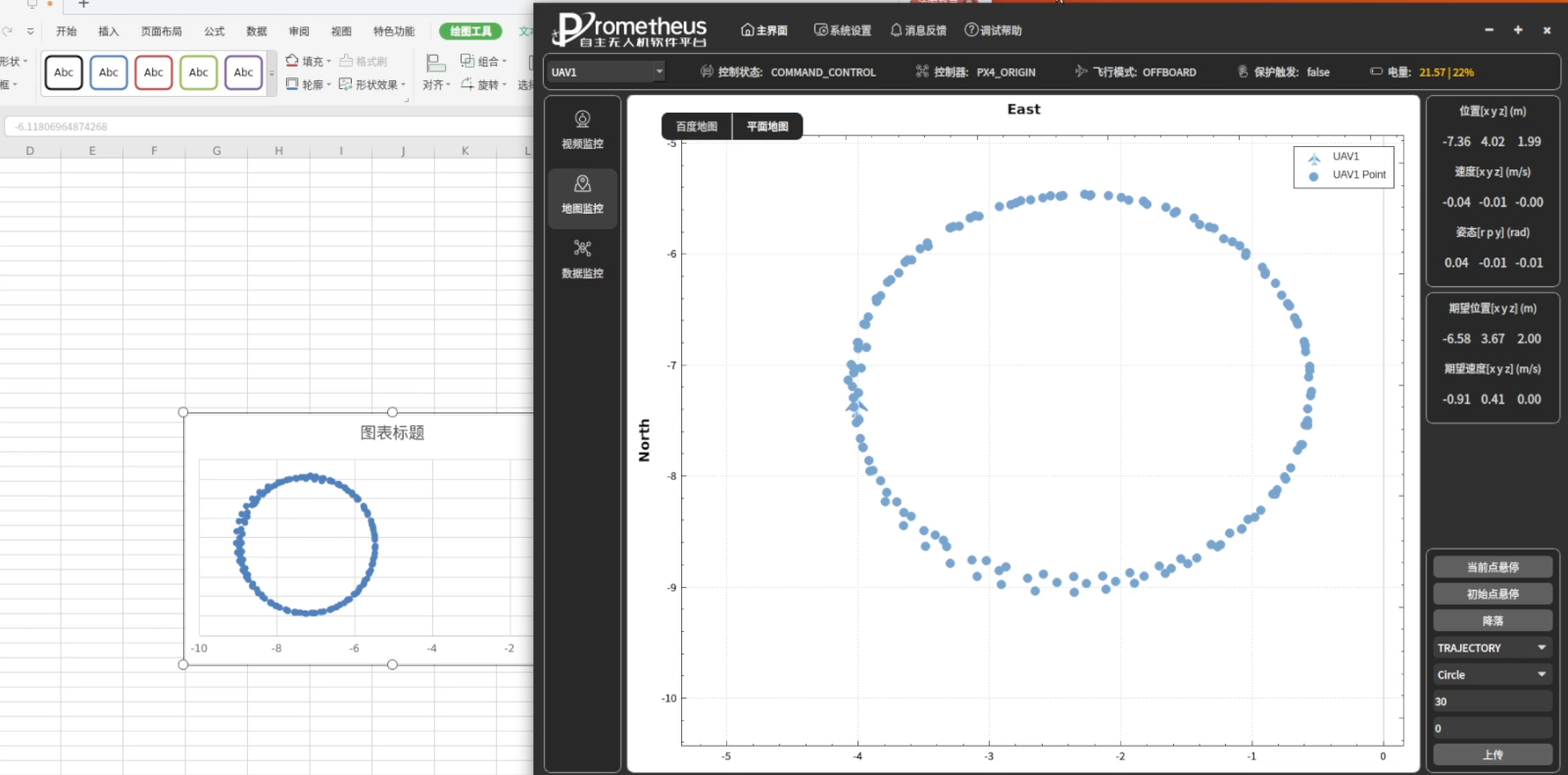
可以将生成的位置数据表生成图表,以达到显示一段时间的轨迹记录。效果如上图(轨迹控制-圆)。