参数检查修改
提示
建议固定地面站IP以及空中端IP,防止反复修改。
参数修改本质上是通信模块的参数修改,修改方式有两种:
- launch文件修改参数(长期有效)
- 地面站修改参数(通信节点存活期间有效)
遇到如下两种情况需要将组播地址设置为地面站IP:
- 地面站和仿真跑在一台电脑上,且不连接网络,此时无法形成组网,需将组播IP和地面站IP设置都127.0.0.1。
- 使用无法组网的数据链路时(如H16遥控器等),需要将组播IP设置为地面站IP。
这两种情况会导致地面站无法接收机载端的数据,所以无法使用地面站去修改参数。
launch文件修改参数
上述两种情况可以参考该launch文件(组播地址默认为地面站地址):/Prometheus/Modules/communication/launch/h16_bridge.launch
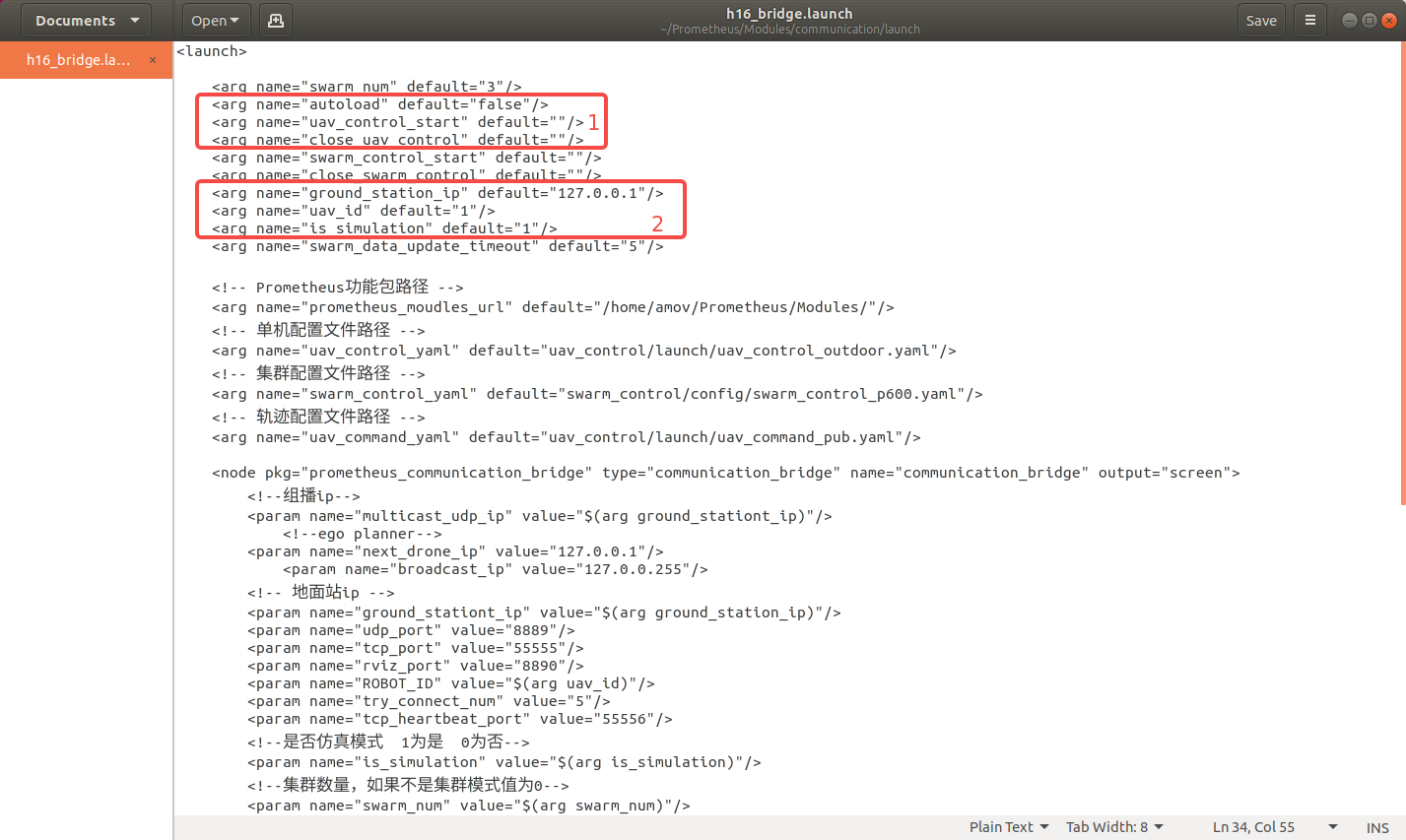
一般而言只需要修改上图中框选中的参数,上图中标注介绍如下:
- 标注1:第一个参数为是否开启自启(即点击连接和断开连接是否运行脚本命令),第二三个参数为点击连接和断开连接的参数脚本指令。
- 标注2:第一个参数为地面站IP,第二个参数为无人机ID,第三个参数为是否是仿真使用(1为是,0为否)。
地面站修改参数
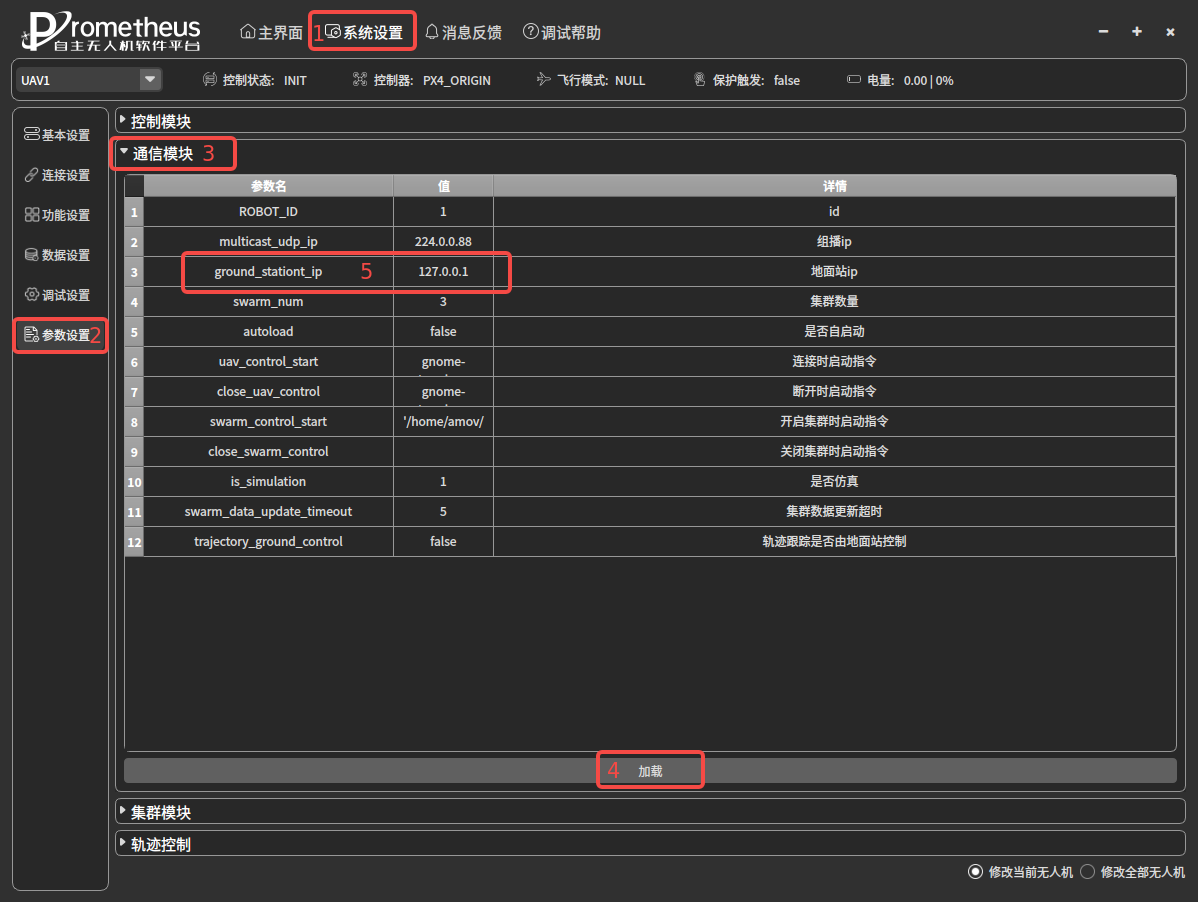
按上述步骤操作即可,下面简单介绍步骤流程:
- 点击 系统设置,切换到系统设置界面。
- 点击 参数设置,切换参数设置界面。
- 点击 通信模块,切换通信模块参数显示界面。
- 点击 加载,加载机载端参数,加载完成后,会通过消息反馈进行提示,如果没有提示请检查数据链路(组网)情况或通信节点是否正常启动。
- 双击 地面站IP(也可以是其他参数)参数的值,即可进行修改,修改完后也会有消息反馈进行提示。
参数脚本指令写法可以参考如下:
# shell脚本 如果shell脚本中已经写了gnome-terminal -- ,下方的可以省略
gnome-terminal -- '/home/amov/Prometheus/Scripts/simulation/px4_gazebo_sitl_test/px4_sitl_indoor.sh'
#launch文件
gnome-terminal -- roslaunch prometheus_uav_control uav_control_main_indoor.launch
#其他指令,下述指令为杀死除了通信节点和主节点的其他节点
gnome-terminal -- rosnode kill `rosnode list | grep -v /communication_bridge | grep -v /rosout`
launch文件部分参数修改参考(仿真情况):
# ...
<arg name="autoload" default="true"/>
<arg name="uav_control_start" default="'/home/amov/Prometheus/Scripts/simulation/px4_gazebo_sitl_test/px4_sitl_indoor.sh'"/>
<arg name="close_uav_control" default="gnome-terminal -- rosnode kill `rosnode list | grep -v /communication_bridge | grep -v /rosout`"/>
# ...
<arg name="ground_stationt_ip" default="127.0.0.1"/>
<arg name="uav_id" default="1"/>
<arg name="is_simulation" default="1"/>
# ...
提示
可以将autoload参数置为false,然后手动启动仿真,这种方式也是可行的。
注意
其他参数根据实际情况进行修改,如其他模块配置文件路径等等。
此时进行下一步操作,启动通信节点。