准备工作
环境要求
一台x86架构电脑
windows10、windows11、ubuntu 18.04、ubuntu 20.04系统(目前windows版本仅在windows10和windows11上进行测试,其他windows版本可以自行测试使用)
软件下载
注意
因为协议上的一些变动,导致协议不匹配,可能会导致地面站使用失败的情况,可以查看更新记录查看更多对应情况。
Ubuntu版本
下载完成后需要赋予权限,操作如下:
chmod a+x PrometheusGroundStation-Pro.AppImage
注意
下载完成、权限赋予后,先双击启动,创建下方配置文件存放路径,同时查看程序是否正常,上述操作完成后关闭软件。
Gstreamer依赖安装
sudo apt-get install libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev libgstreamer-plugins-bad1.0-dev gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly gstreamer1.0-libav gstreamer1.0-doc gstreamer1.0-tools gstreamer1.0-x gstreamer1.0-alsa gstreamer1.0-gl gstreamer1.0-gtk3 gstreamer1.0-qt5 gstreamer1.0-pulseaudio
注意
如果缺少Gstreamer依赖,可能导致Gstreamer拉流失败。
注意
1.23.05.09版本前下面存放路径修改为~/Documents/PrometheusGround/。
下载完成后解压到home路径下的/Documents/PrometheusGroundStation/中(~/Documents/PrometheusGroundStation/)。
注意
该模块必须下载,且必须将其放到指定路径,否则会导致地面站无法显示地图。
下载完成后解压到home路径下的/Documents/PrometheusGroundStation/中(~/Documents/PrometheusGroundStation/)。
编译该功能包:
# 需要ROS环境(自行配置)、其他环境(sudo apt install ros-melodic-qt-build)
cd ~Documents/PrometheusGround/myrviz
catkin_make
注意
该模块可选择下载(不下载也不会影响使用),该模块目前暂未进行真机测试,仅限仿真使用。
Windows版本
注意
1.23.05.09版本及以后版本才支持windows系统。
下载完成后解压到系统文档路径下的PrometheusGroundStation文件夹中。(~/文档/PrometheusGroundStation/)。
rviz模块暂不支持windows版本。
P系列无人机配置文件
专门针对P系列无人机增加的一些功能启动按钮,方便用户的程序的使用。
准备完成
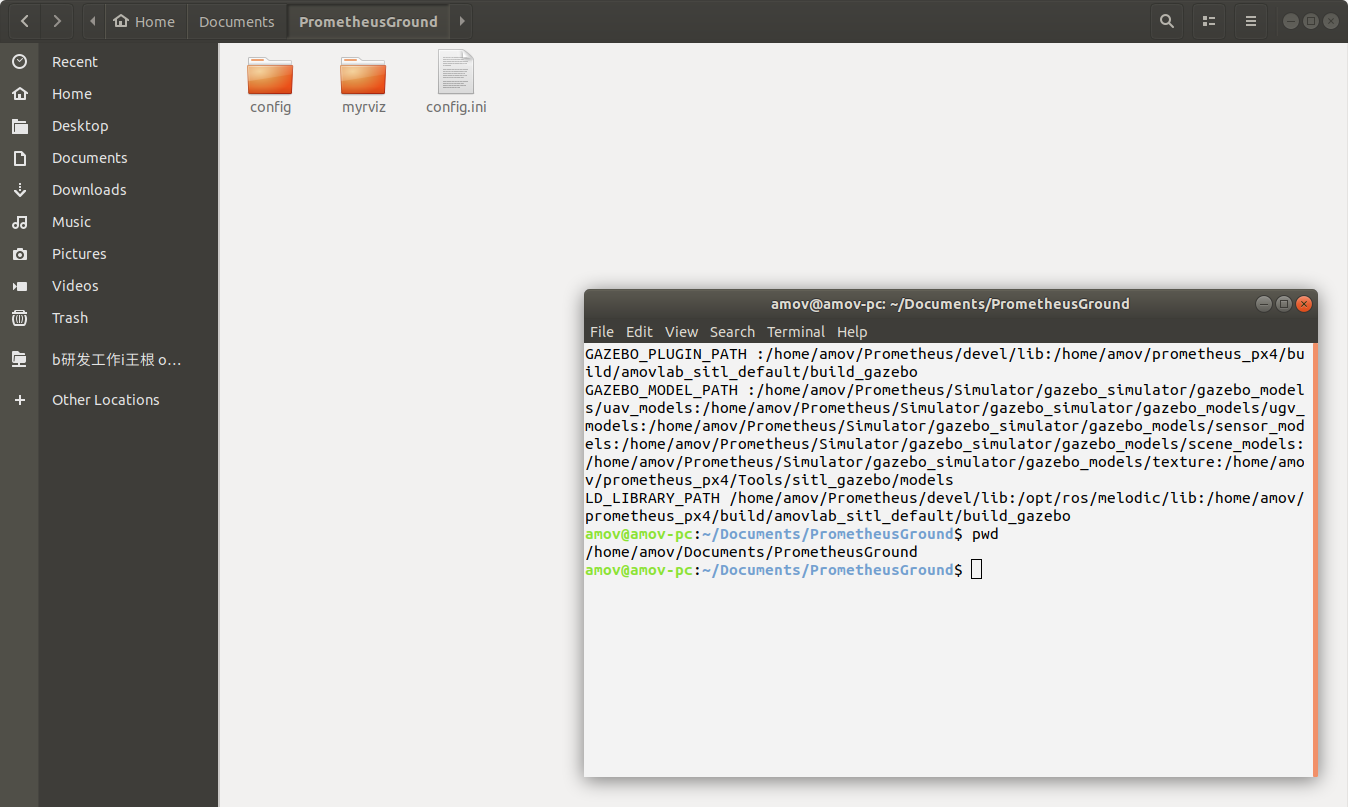
准备完成后,如果上方配置文件全部下载,那么存放路径以及文件夹如下图所示:
下图为ubuntu系统,1.23.05.09版本之前的地面站路径存放,之后版本 PrometheusGround 文件夹变更为 PrometheusGroundStation 文件夹:
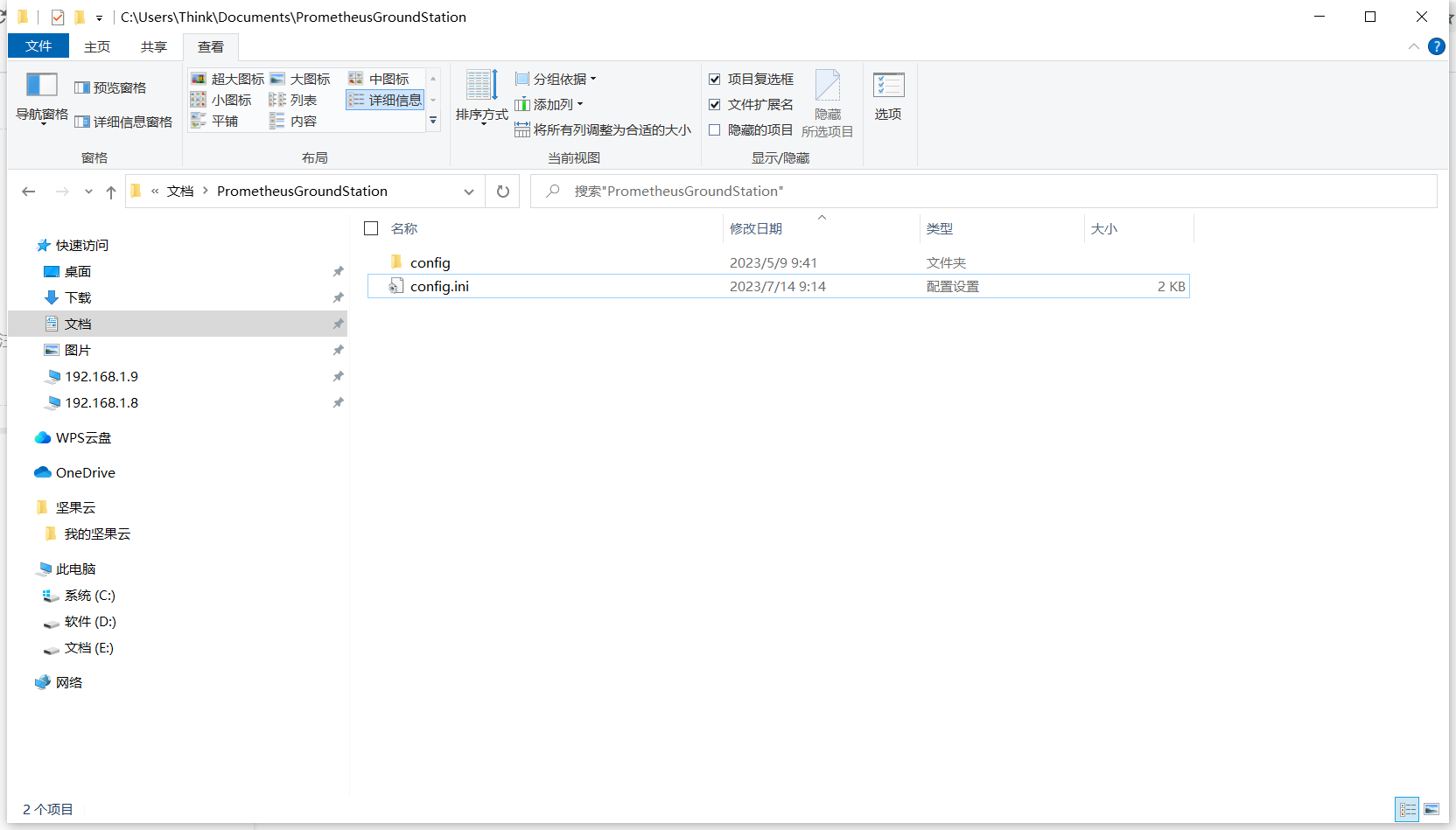
下图为windows系统:
注意
如果使用地面站添加了无人机,会出现一些其他数据存储文件,该情况是正常的。