参数调节
ICF的默认控制参数是适配的MFP450无人机,其飞机参数如下所示:
- 410轴距机架
- T-motor2216电机*4
- 20A四合一电调

如果您的飞机跟MFP450的机架轴距或者电机参数相差较大,则可能需要进行控制器PID参数调节。下面介绍PID参数调节的方法。
查看参数
ICF5的PID参数可以在控制台输入param list CONTROL来查看,如下所示。一般来说我们只需要调节高度环PID(如果高度不稳定)和姿态角速度环PID(如果姿态不稳定)。
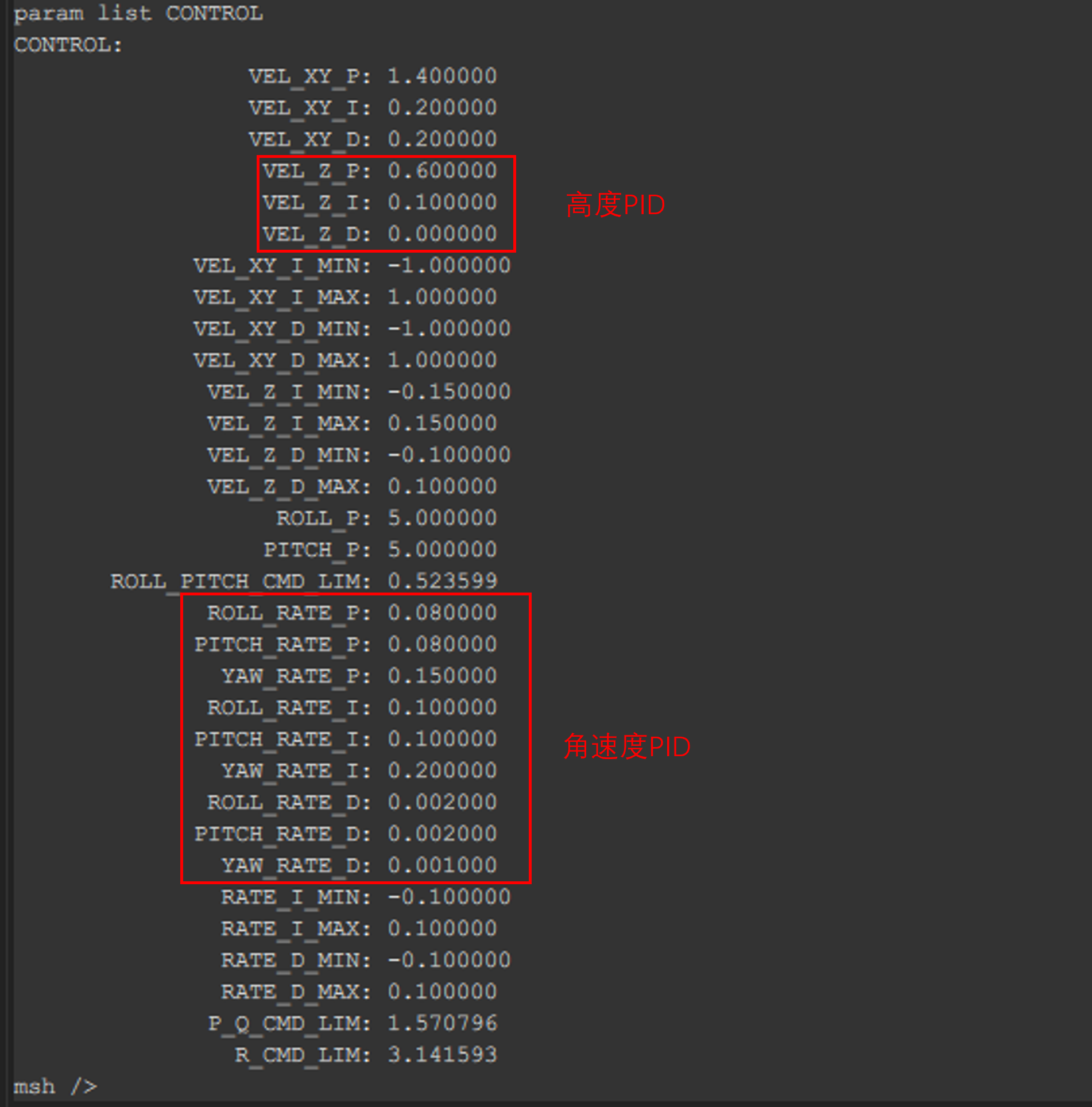
以姿态内环为例,如果发现无人机飞行中姿态不稳定或者位置抖动现象明显,则需要调节角速度PID。一般情况下,对于小于MFP450的飞机,需要调小PID参数,对于大于MFP450飞机,需要调大PID参数。
修改参数
目前可以通过两种方式来修改参数:
- 通过控制台param指令
- 通过QGC地面站修改
param指令:
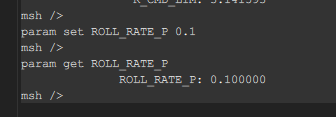
比如要将ROLL的角速度参数P,将设置为0.1,可以通过如下指令:
param set ROLL_RATE_P 0.1
如果要将给某个参数值设置负数,则需在负数前面添加
--,比如param set RC1_REV -- -1
修改完成后,可以通过如下指令查看参数值:
param get ROLL_RATE_P
参数修改完后,无需重启飞控,立即生效。所以理论上可以在飞机定点的过程中对参数进行微调,但是为了安全起见,建议在地面调节完参数再起飞进行测试。
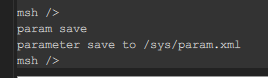
当调节了一组比较稳定的参数后,可以输入param save保存,防止参数掉电丢失。
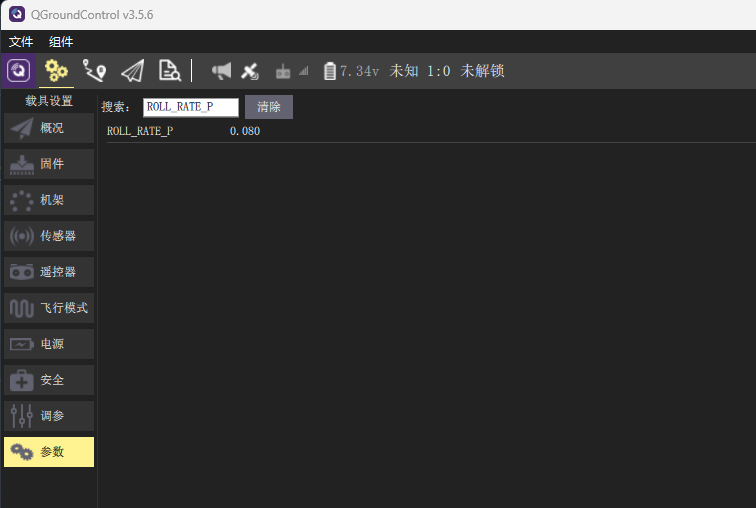
QGC地面站:
在QGC参数界面,输入要修改的参数,然后点击参数即可设置参数值。
同样的,当调节了一组比较稳定的参数后,可以输入param save保存,防止参数掉电丢失。
查看控制曲线
如果要查看控制器内部的控制曲线,比如目标信号和估计信号的误差。可以使用FMT的开环仿真功能,具体使用方式请参考文章以及文章后面的视频演示: