快速使用
USB驱动安装(仅Windows系统需要)
Windows系统需要安装GD32的USB驱动,可进入GD32官网下载

下载完成后,选择对应的x86或者x64安装包进行安装即可。
连接地面站
使用提供的USB线将飞控连接至电脑,USB线将给飞控供电同时提供数据传输。
[飞控USB连接图]
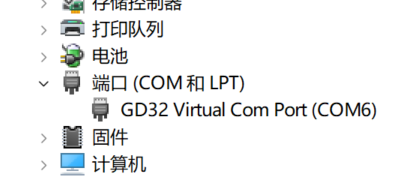
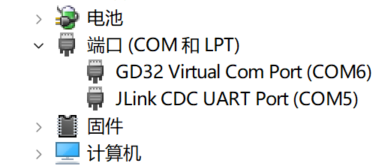
打开设备管理器,找到GD32虚拟串口设备的串口号。例如,如下图所示,USB虚拟串口号为COM6
下载链接:https://download.amovlab.com/fmt/QGroundControl-installer-3.5.6.exe
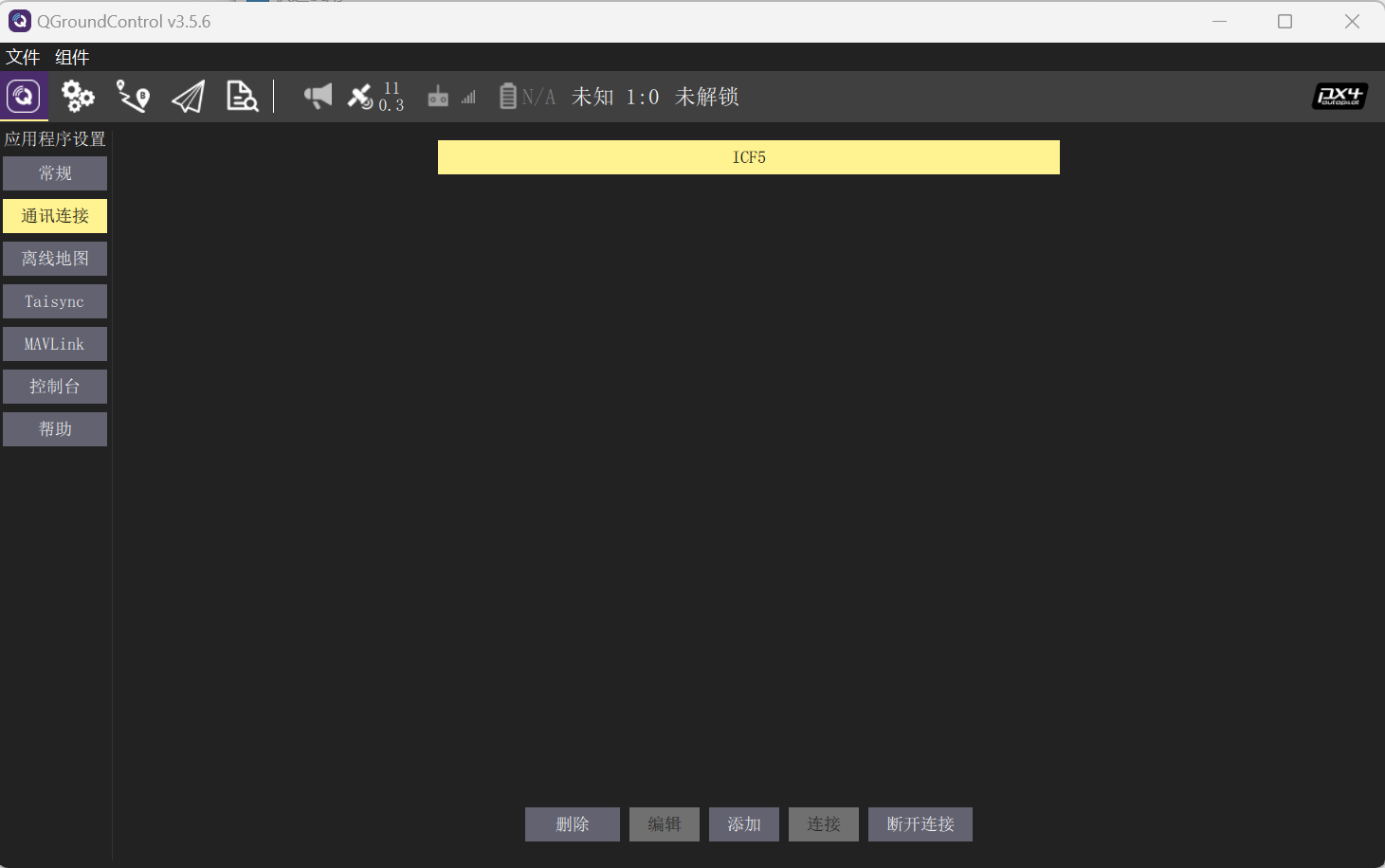
打开QGC地面站(3.5.6版本),进入通讯连接界面,点击添加,并设置如下

选择刚添加的通讯接口,并点击连接。QGC将连接上飞控,如下图所示。
连接控制台
控制台时跟飞控交互的重要方式。通过控制台可以输入FMT系统提供的指令也可以通过控制台查看飞控的打印信息。
控制台目前有两种连接方式:
- Mavlink Console(通过QGC)
- 串口控制台
Mavlink Console
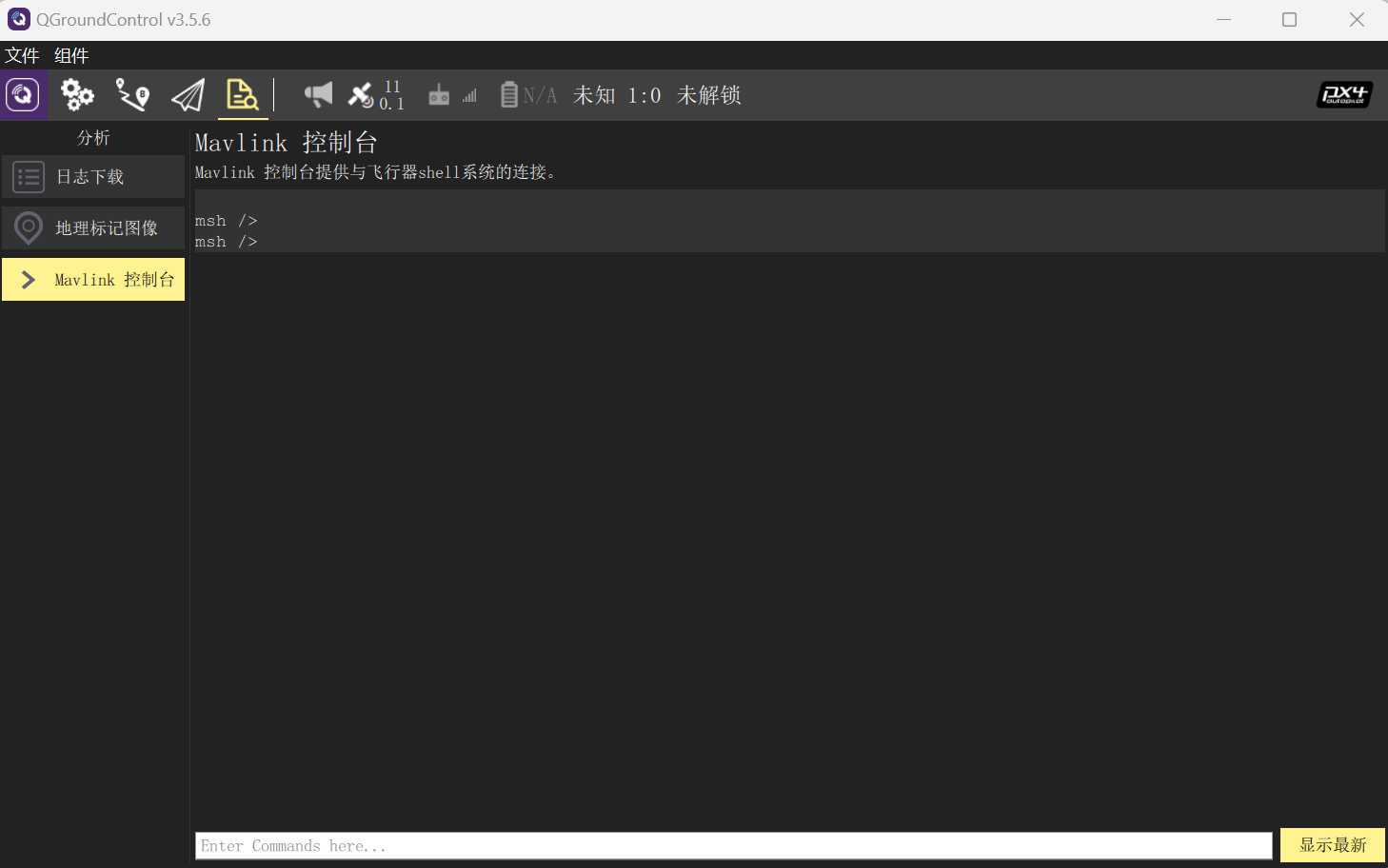
Mavlink Console是通过QGC地面站来连接到飞控的控制台。如下所示,在Mavlink Console界面输入两次回车,将自动连接上控制台
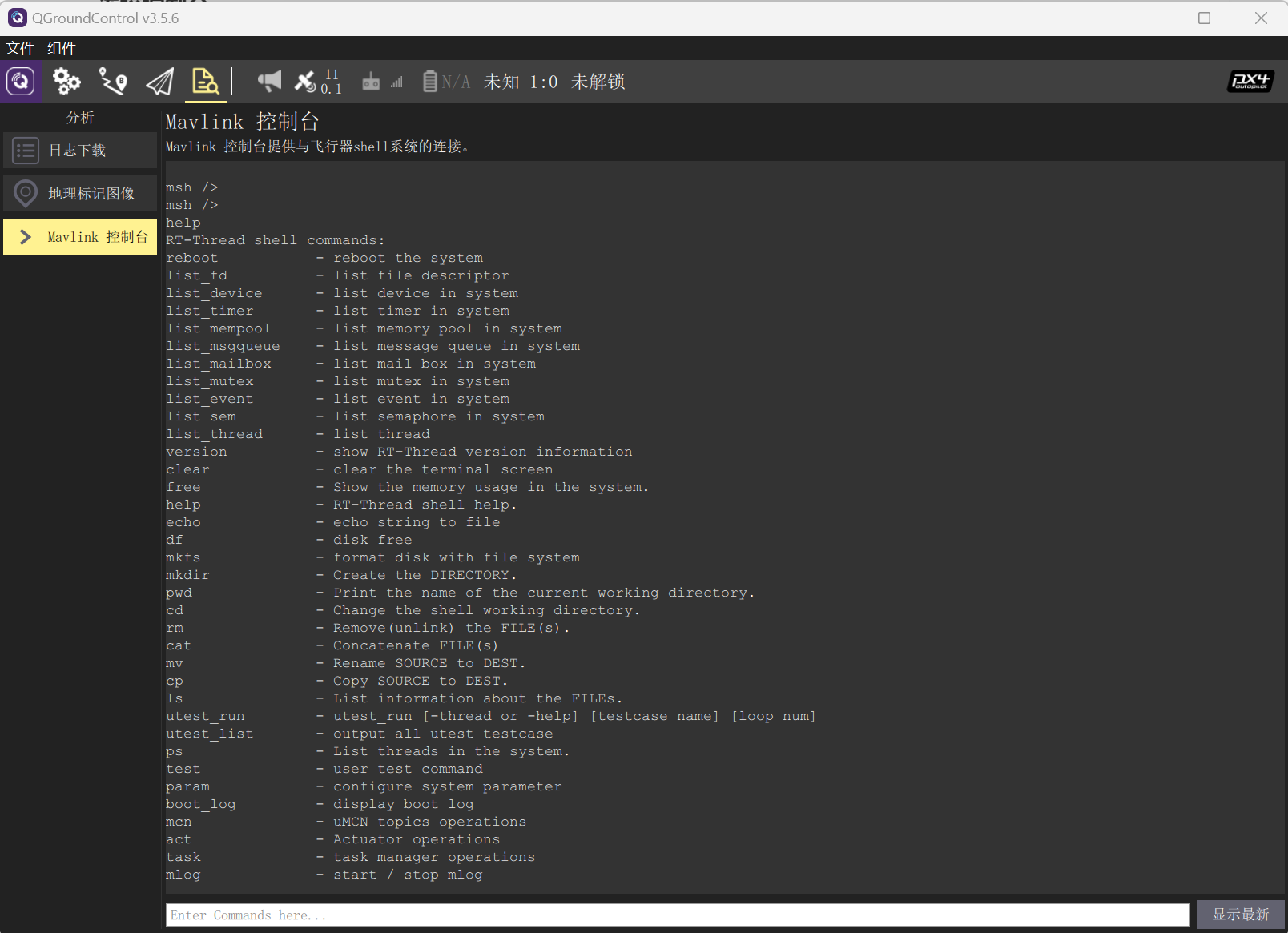
连接上控制台后,可以在输入框输入指令。输入help指令来查看FMT系统提供的所有指令信息
串口控制台
相比于Mavlink Console,串口控制台可以在任意情况下使用,包括当飞控发生异常的前一时刻,串口控制台会输出飞控的错误信息,用于定位错误。而Mavlink Console则很可能不能及时输出错误时刻的信息。
串口控制台默认使用Debug口的串口(serial0)连接,也可以修改配置文件将控制台映射到其它串口,具体请参阅配置飞控章节。
将Debug接口的串口线连接到JLink的串口端口,如下图所示。
[图]
注意
也可以使用其它设备来连接串口,如USB转TTL线,无线数传等。
将JLink连接上电脑,从设备管理器中查找JLink虚拟串口端口的设备号。
注意
如果没有出现JLink的端口设备,说明未安装Jlink驱动,请访问Jlink官网https://www.segger.com/downloads/jlink/下载。
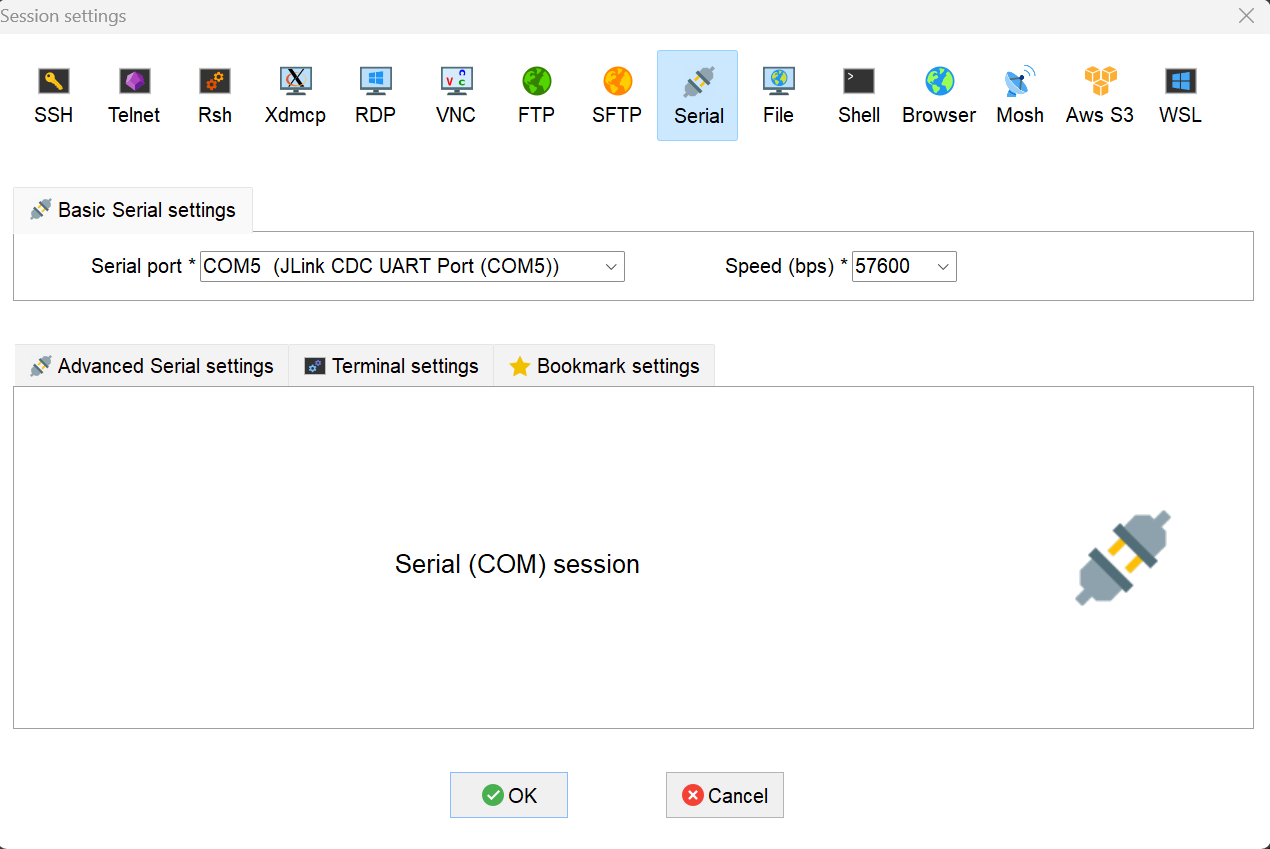
使用串口助手软件(如MobaXTerm)连接JLink的串口端口,将波特率设置为57600
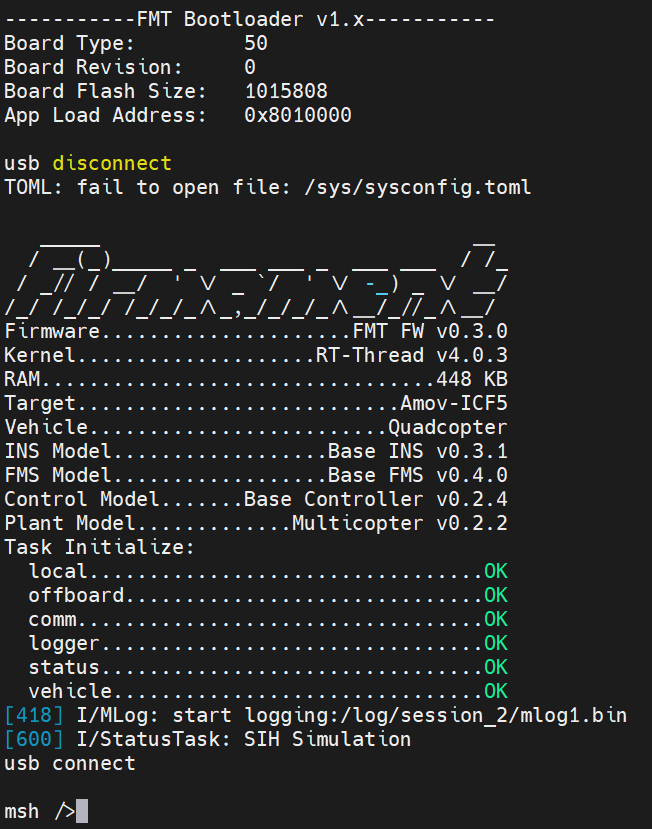
给飞控上电,可以看到控制台的输出信息如下所示。同样我们可以通过串口控制台来输入指令跟飞控进行交互。
查看飞控数据
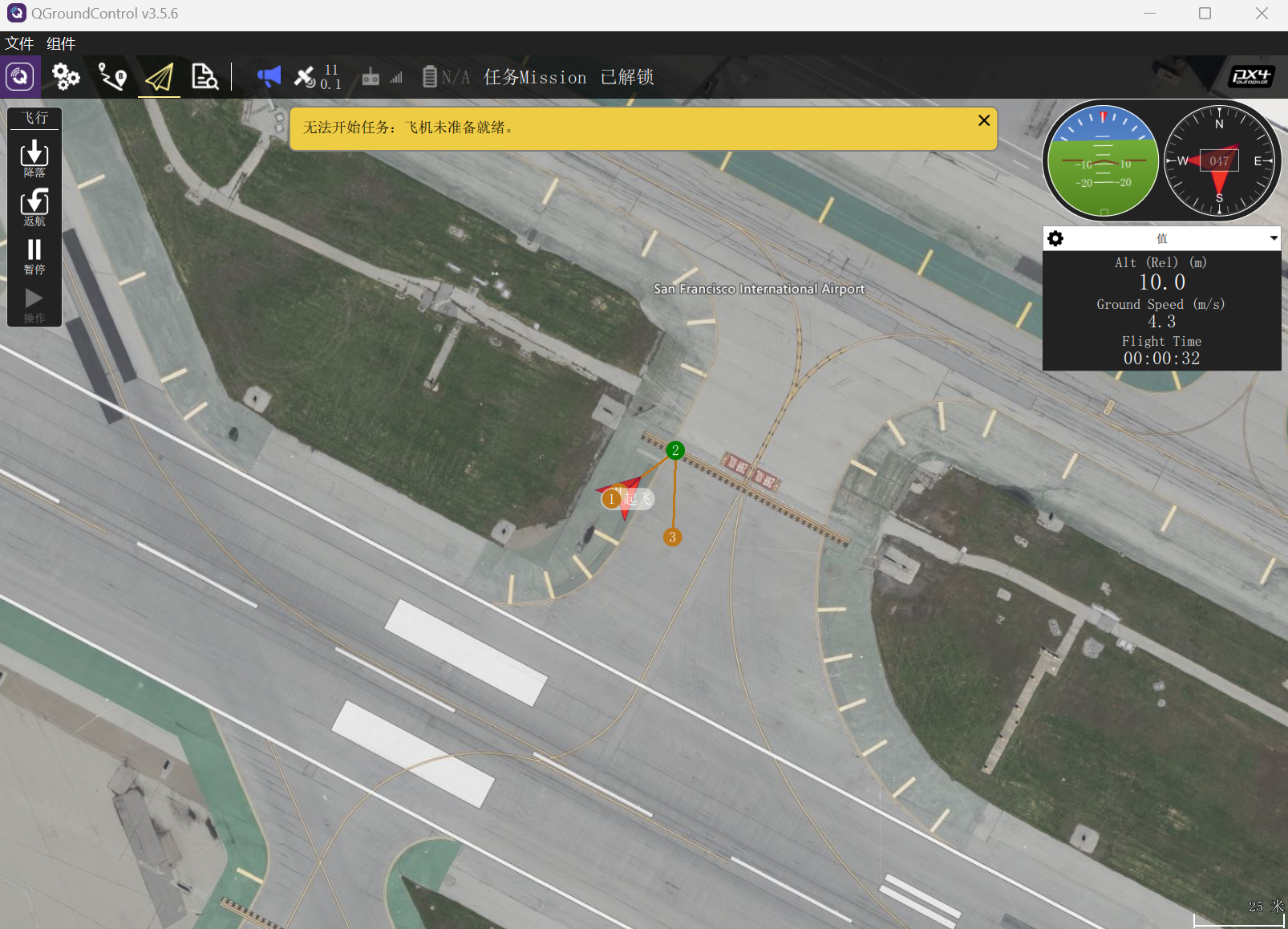
可以通过QGC地面站的飞行界面查看飞机的姿态,航向,速度和位置等信息,如下图所示
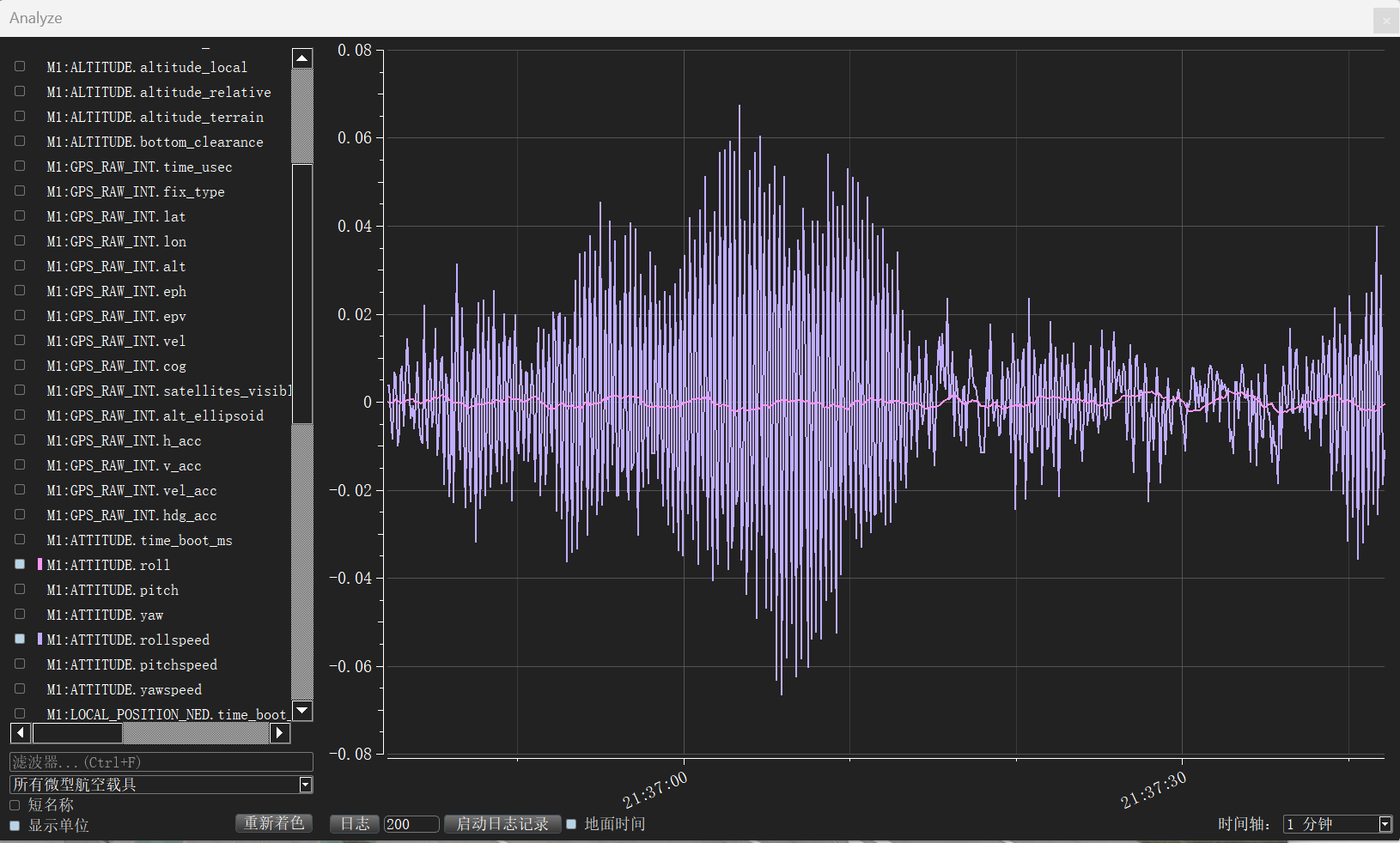
也可以使用QGC的Analyze功能来查看Mavlink消息的数据,如下图所示
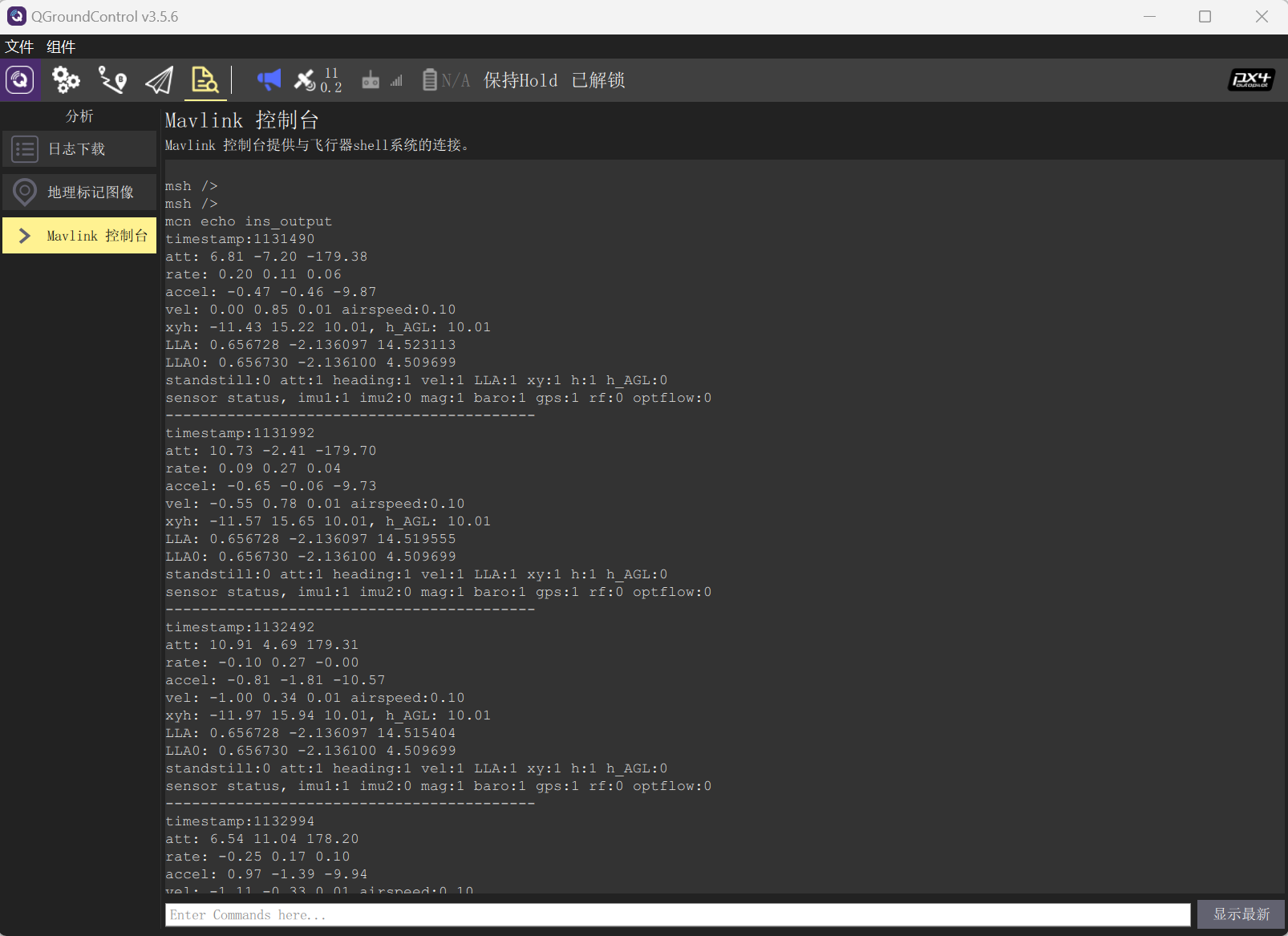
除此之外,还可以通过控制台提供的mcn指令来打印需要查看的消息数据。比如要查看导航的输出数据,可以输入mcn echo ins_output指令。
当然,FMT还提供更强大的数据查看方式,如日志和开环仿真,通过这种方式可以获得算法模型的所有数据。具体使用方式请参阅FMT文档。