首次飞行
首次飞行需要做一些飞行前的安全检查,以确保飞行的安全。
遥控功能检查
首先需要检查遥控功能是否正常,请按如下步骤进行。
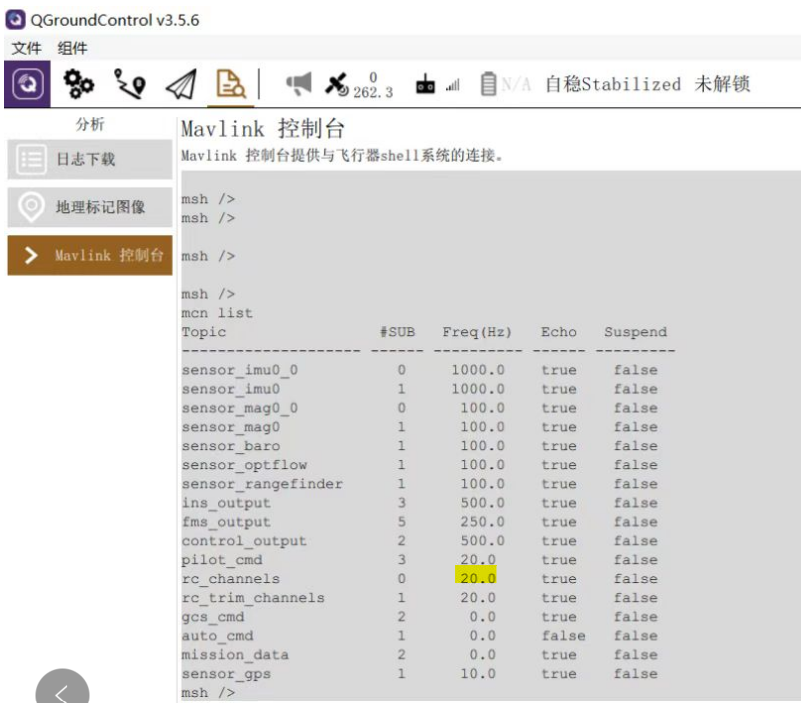
首先检查是否收到遥控数据。输入mcn list,查看rc_channels数据的发布频率是否为非0。
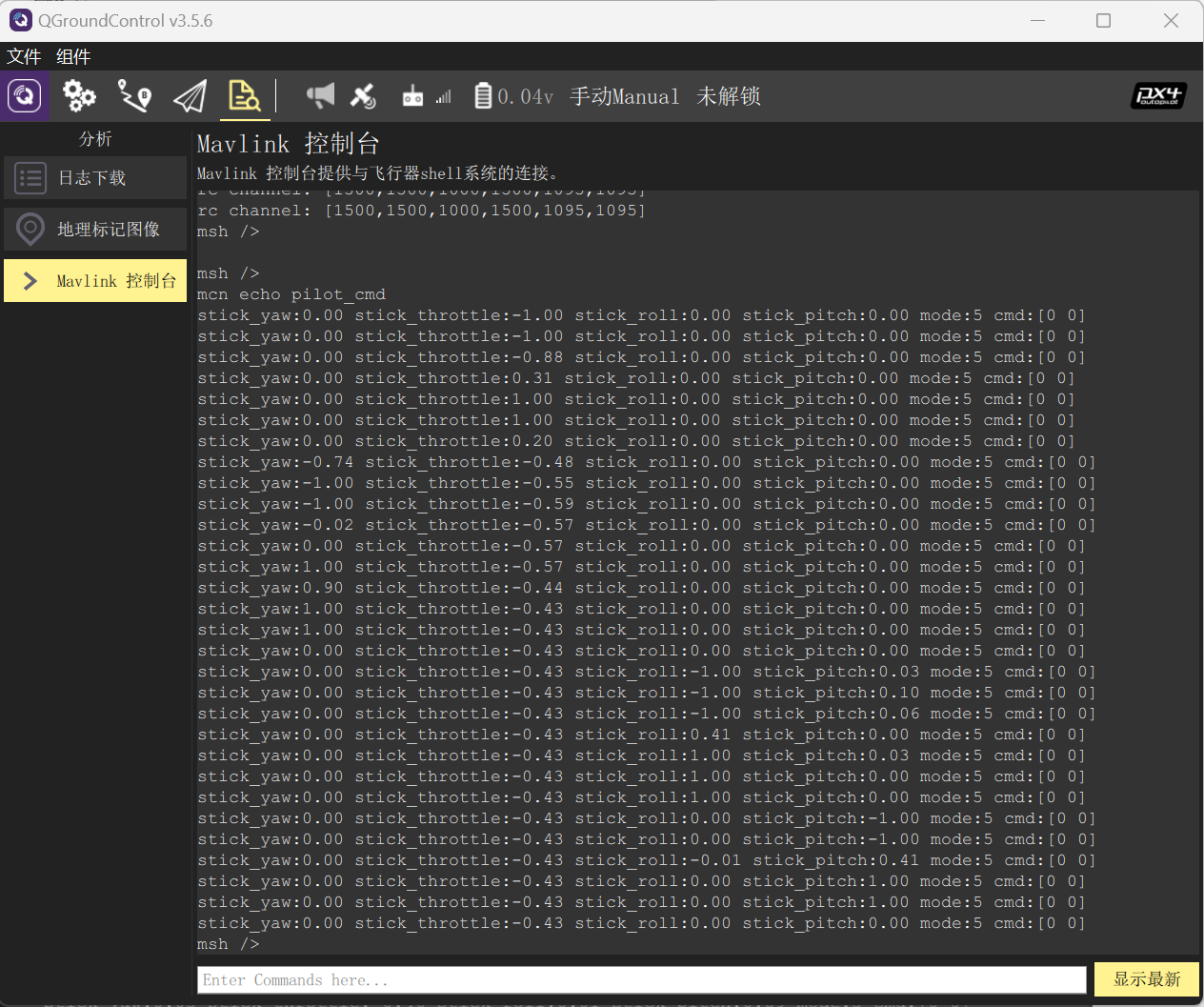
然后检查摇杆映射是否正确(关于遥感映射配置请参考配置飞控章节)。映射后的遥控数据通过pilot_cmd消息发布,输入mcn echo pilot_cmd查看映射后的摇杆数据。将throttle,roll,pitch,yaw杆分别打到极限位置和中间位置并查看输出的数据是否正确。
摇杆打到最下或最左输出应为-1,打到最上或最右输出应为1,打到中间输出应为0。
注意
如果误差过大,请重新进行遥控校准。
接下来检查模式切换是否正常。根据默认的toml设置,SWC开关拨到上、中、下档,对应的模式为:
- 上:Position位置控制模式
- 中:Altitude定高模式
- 下:Stabilize自稳模式
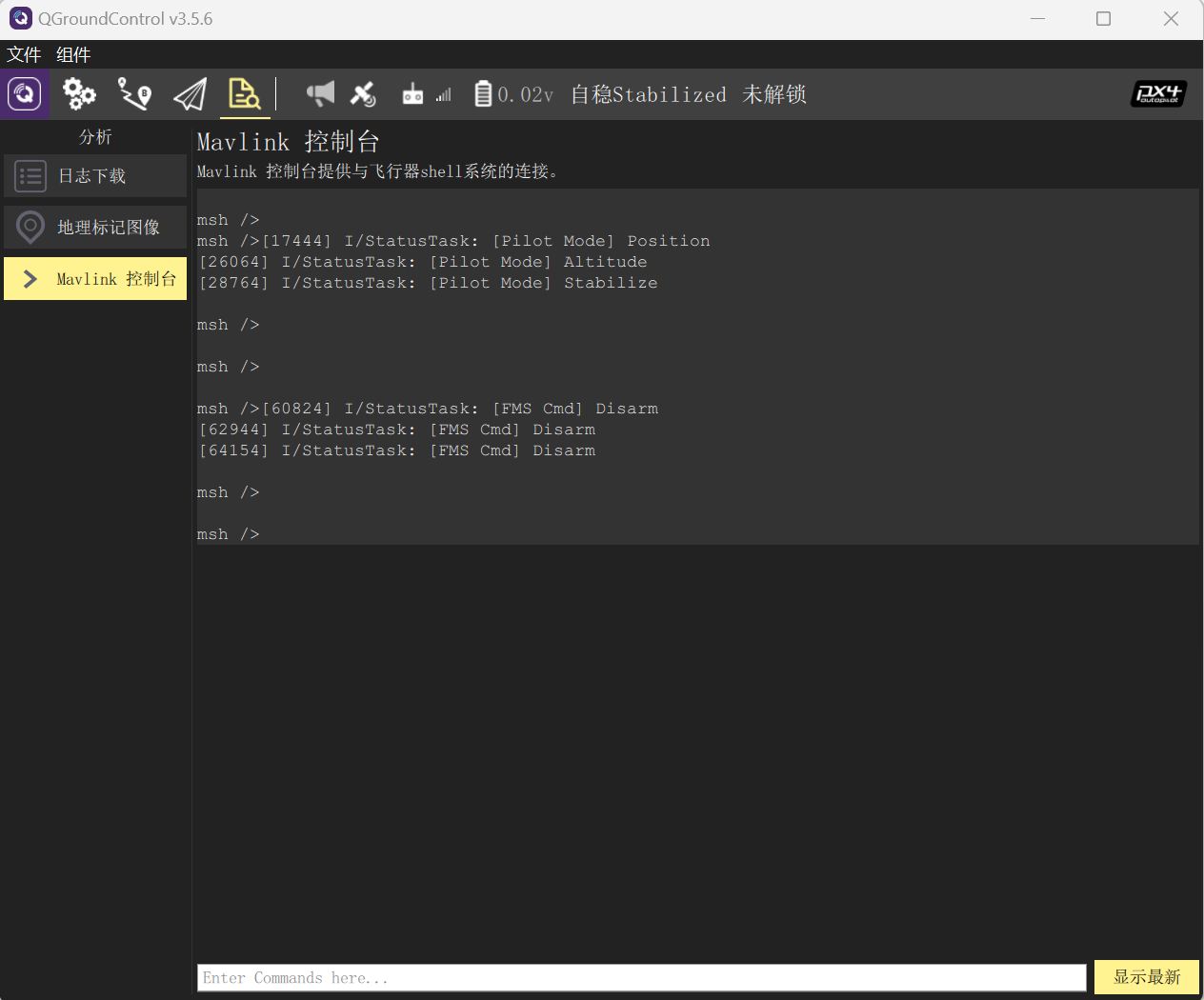
通过控制台查看飞控的控制台输出模式,应跟sysconfig.toml中的模式设定相匹配,分别为Position/Altitude/Stabilize。

最后检查紧急上锁开关是否正常。紧急上锁开关是用于紧急情况下对飞机进行一键上锁,比如飞机无法自动上锁,或者飞机撞到障碍物等情况下使用。
将遥控器SWD开关从上拨至下,将触发Disarm指令,可以通过控制台查看。
注意
FMT飞控的指令是变化沿有效,故将SWD从上拨至下只会触发一次Disarm指令,如要再次触发,需先将SWD拨回上面,然后再次拨至下面。
解锁/上锁
对于飞机解锁操作,将左边摇杆打到右下角不动,如下图所示。大约1.5秒后飞机解锁,电机怠速(Standby)旋转。慢慢推高油门,当油门大于一个阈值(一般是-0.1),将从怠速进入解锁状态。

怠速模式(Standby)下,将左边摇杆打至左下角不动,大约1.5秒后飞机上锁。
飞机解锁后,拉低油门,当飞机触地后,将油门拉至最低,飞机将自动上锁。
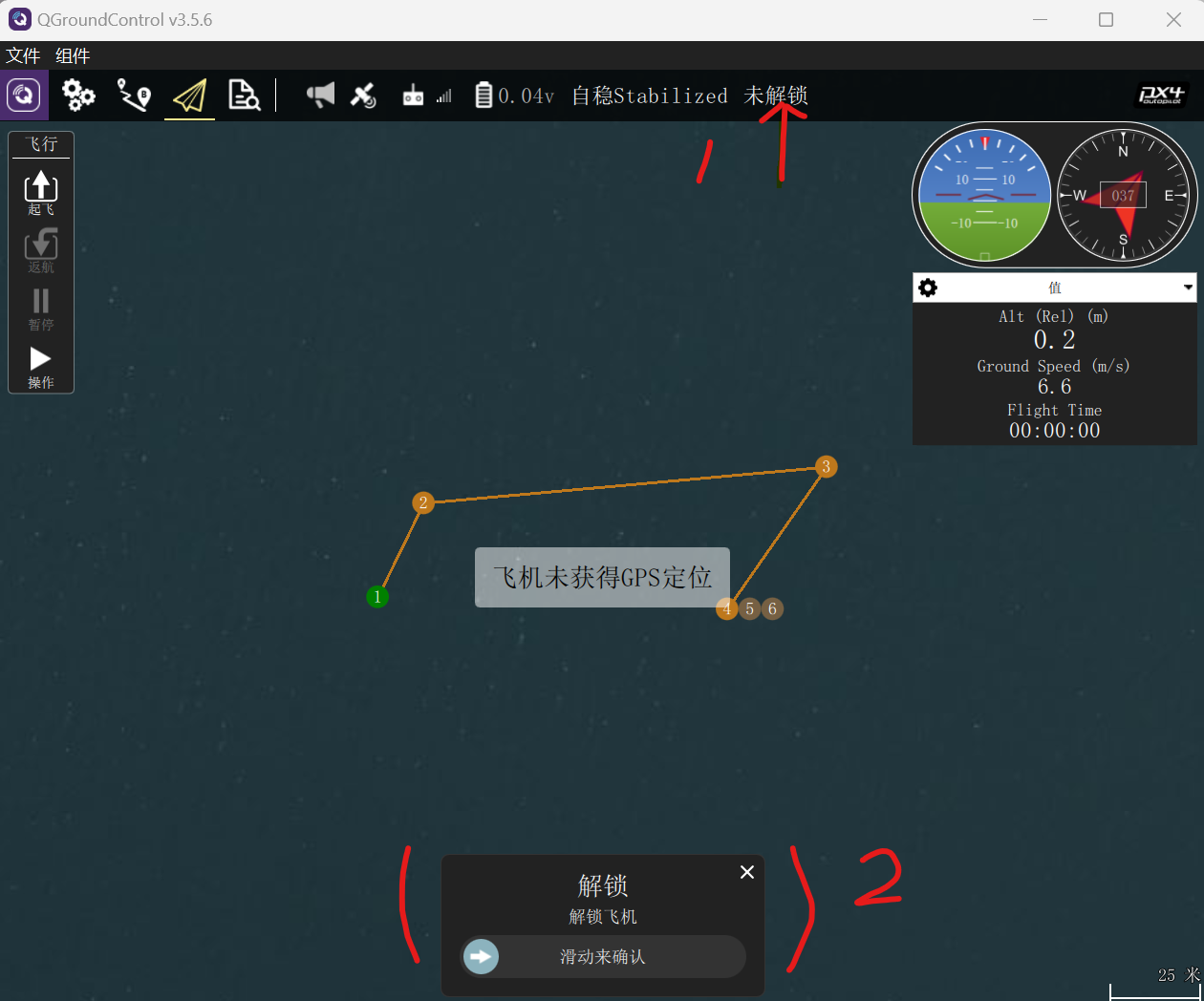
飞机的解锁上锁操作也可通过QGC地面站发送解锁/上锁指令。首先点击下图1所示位置,下方将出现解锁或上锁的滑块(根据当前锁定状态决定),滑动滑块,将触发解锁或上锁的指令。
电机检查
首先取下所有电机的桨叶,然后给无人机连接电池。使用遥控器将模式设置为Stabilize,并解锁。此时电机应该慢速旋转,然后缓慢推高油门,飞控将解锁,电机转速将响应油门杆。将油门杆拉至最低,2s后飞机将自动上锁。
姿态检查
连接地面站,通过地面站观察飞机的姿态响应是否正常。
仿真模拟飞行
如果对于飞机的操纵不太熟悉的用户,建议首先使用SIH仿真模式进行飞行演练,以熟悉飞机的操作。关于SIH仿真模式的开启方法,请参阅FMT官方文档的步骤。
飞行测试
为了安全考虑,建议首先在室外开阔场地进行测试。新手推荐首先使用Position模式进行飞行。