遥控器校准
遥控器校准不能使用QGC,因为QGC的遥控校准是基于PX4的遥控配置,而FMT的遥控配置跟PX4的不一样。故我们提供了calib rc指令来进行遥控校准的操作。
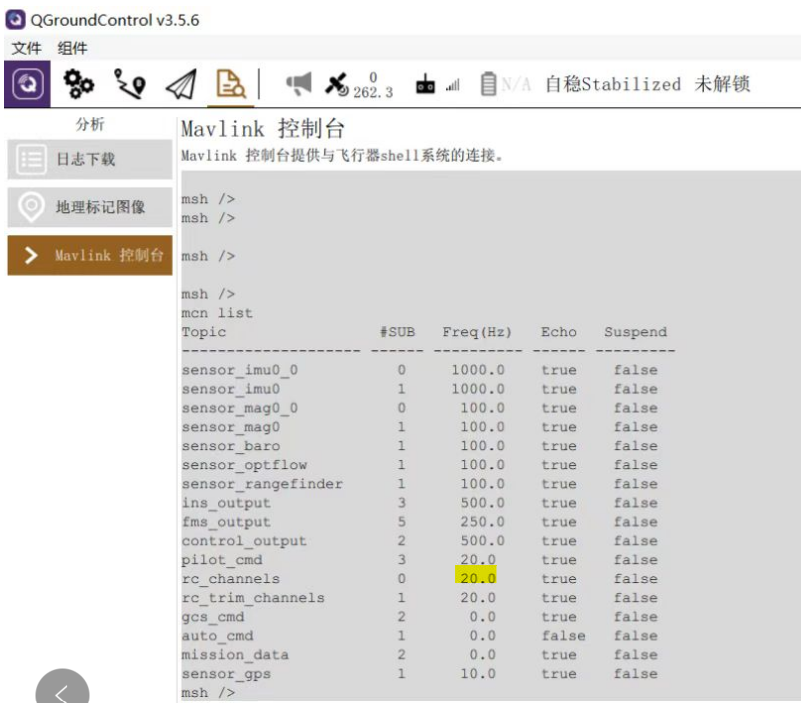
- Step1:在校准之前,请先确保遥控接收机有连接到飞控并且遥控器有打开。我们可以输入
mcn list指令来查看rc_channels的消息的发布频率是否为非0,非0则表示有正常收到遥控信号。
- Step2:输入
calib rc指令开始校准,按照提示进行遥控校准。

-
Step3:rc_trim_channels消息即为遥控原始数据(rc_channels消息)校准后的结果,输入
mcn echo rc_trim_channels查看校准后的数据。将摇杆或开关拨到极限位置和中间位置,其对应值应为最小值1000或最大值2000和中间值1500。 -
Step4:输入
param save保存校准参数