问题总结
-
问题总结
注意!
1、 如果你要跑仿真,安装按照prometheus wiki步骤执行即可,这个我们经过大量测试后的。我们推荐18.04系统,有人遇到子模块无法更新,它使用的是Ubuntu16.04。在真实板载计算机上面,realsense sdk 为2.36.0;realsense-ros 为2.2.15。opencv源码要完整安装3.3.1。不管你的板载计算机是arm,x86最好按照这个要求。
2、我们现在是集成的prometheus的板载计算机有Jetson-Xavier开发套件,Jetson-Xavier-NX开发套件,Jetson-Nano(B01)开发套件。如果各位不想装板载计算机上面的环境,可以联系我们,都是有集成的。(均为18.04系统,jetpack4.3/4.4)。对于飞机上面的Jetson-TX2,它本身是Ubuntu16.04的,只要下载prometheus,也能编译成功。目前还没有将该款板载计算机升级到18.04。
3、对于px4_command这个项目,在以下环境中运行(ubuntu18.04不行):ubuntu16.04 LTSFirmware v1.8.2ros kinetic v1.12.17gazebo v7.16.1QGC v3.3.2以后的同学学习px4_command项目的时候别把环境搞错了。
4、之前群里讨论了几次的 unsupport fcu问题,这是因为是由于PX4和mavros通信时 udp端口不匹配导致的,一定要使用专用的PX4固件,PX4官方在版本更迭的时候改了默认的udp端口,替换mavros版本的方法只是使用了旧的udp端口号,改一下px4中的rcs文件即可。
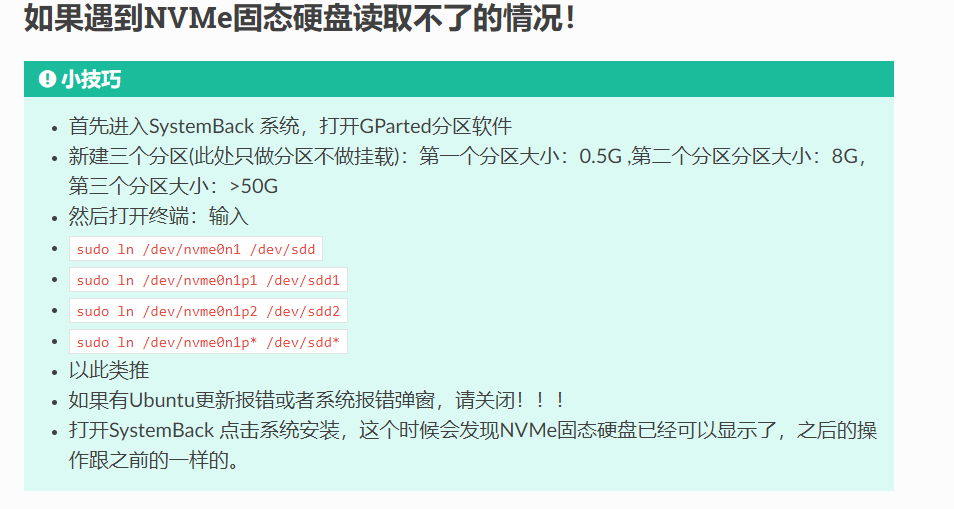
也可以外接一个硬盘。
-
Q1:二维码辅助降落的时候,不修改底层EKF2代码的话,那二维码不就只提供一个目标位置信息吗?无人机定位还是靠着gps和imu,这样不还是无法做到精准定位降落吗?
A:需要多精准?差分gps可以试一试,自身估计不准的话确实很难精准。
-
Q2:测试自主降落demo出现输入1时飞机炸上天,为什么啊?
A:初步判断是笔记本处理能力太渣以及起飞高度设定太高导致,可以降低起飞高度或者增加解锁后等待时间解决,我在台式机上并未遇到该问题,证明电脑cpu能力对仿真还是有很大帮助的,同样的代码也会跑出不通的效果。也可能重新装一遍ros就能解决。
-
Q3:px4固件通过视觉提供位置数据,用来定点,那么视觉需要提供的数据频率最低大概有多少?
A:gps信号是10HZ比它大就可以。
-
A:参数基本不需要调,一些重点细节可以看wiki,一飞冲天调一下平衡推力,调小;所有真实飞行的launch和参数我会同步更新到experiment文件夹。
-
A:不仅可以定高也可以定点,因为它本身就是提供位置信息的。
-
Q6:Jetson nano通过串口连接px4,启动了 control_onboard,用set_mode节点无法切换模式,如下图所示:

A:tx,rx反了或者线松了。
-
Q7:局域网配置里面,可不可以都用飞控热点,看推荐配置里面两种方案都要自备一个路由器,为什么吗?
A:不行,因为功率不够,但是可以尝试,估计nomachine勉强带的动,程序跑起来有些费劲。
-
A:重启上电,还不行就重新刷系统。
-
Q9:请问promethues代码,配什么版本的openCV比较好?
A:建议3.3.1,源码安装完整的3.3.1,安装完成了,opencv路径就有artuco动态链接库了。
-
Q10:这种aruco板识别的时候会出现上下翻转,导致数据直接错乱,有没有解决方案(仿真中)?
A:常遇到,一般都距离太近的时候。
-
A:可以打开qgc查看,也可以通过rosbag记录消息
-
A:安装nvidia的驱动
-
Q13:请问用mavros控制小车的话,一般用哪个消息比较好,我用了/mavros/setpoint_raw/ local下面的Vx与Vy不是很好用,好像因为速度小于零的时候,小车不能识别。
A:px4小车似乎有点问题,要在1.11以上的版本。
-
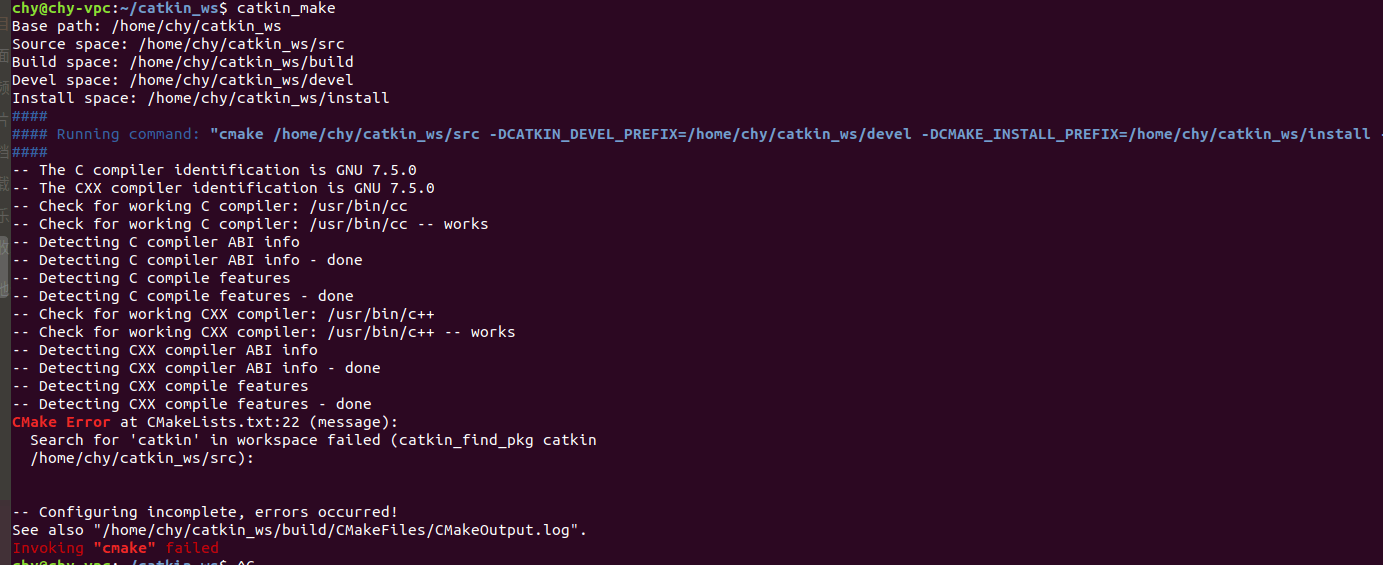
A:一新:删除掉报错的位置。
-
Q15:做最后一步编译的时候电脑整个卡住,鼠标都动不了的情况
A:内存爆了,我是i7 3770 配8G内存,编译会爆内存,加8G swap就可以了,或者搜下命令,只用两个核心进行编译,就是在编译命令前面加了taskset -c 0,1,2,3 就是前四个核心。
-
Q16:如果单纯使用动捕系统做定位的话,我可以直接用relay 工具,把vrpn_client_pose 变成mavros/vision_pose/pose 吗?
A:阿木_戚博:不一定坐标一致。
-
A:不影响,多运行几遍就好了。
-
A:之前出现过,换了个大空间硬盘解决了(不是分配空间,是你虚拟机目录所在硬盘的空间)
-
Q19:跟着wiki上步骤走,仿真飞行配置中在px4编译的时候出现这个问题,无法启动gazebo,有人知道是什么原因吗?
A:你可以运行gzclient和gzserver 看看有啥信息提示:gazebo最近调试可以遵循这样的流程,1.先关闭终端重试2.kill gzclient和kill gzsever3.关机重启再不行把error进行谷歌翻译,能解决70%的诡异问题
-
A:你看哪里订阅了这个话题就知道了,看哪里订阅了这个话题,不用看类型声明
-
Q21:想请教下,附图GAZEBO我已手动添加p450的模型,为什么还是报错呢,试了很多办法没法解决。 谢谢!
A:要用prometheus_px4。
-
Q22:大家好,用ssh 可以通过gnome-terminal 打开新的终端吗?
A:要在机载电脑开两个终端,那就需要连接两次ssh
-
Q23:输入指令999--->1---->2--->3、rviz显示如下(),各位大佬问一下我先启用roslaunch p450_experiment p450_vio_onboard.launch后用roslaunch p450_experiment p450_vio_control.launch,遥控器进入offboard模式,然后999解锁,1起飞,2定点后,为什么飞机这么漂啊? **
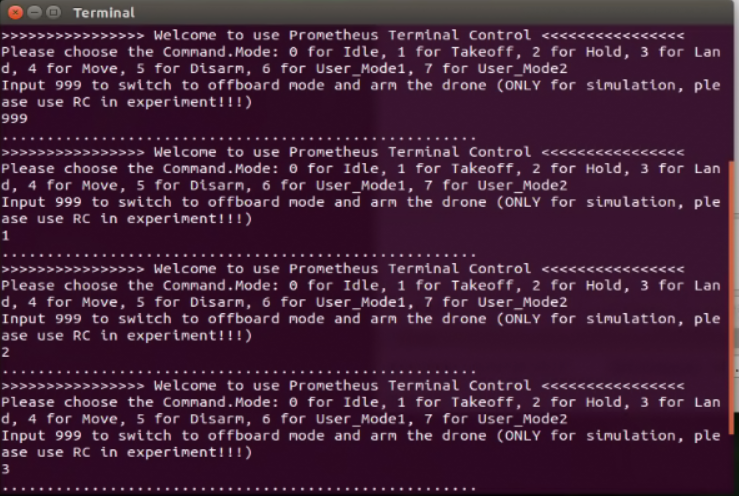
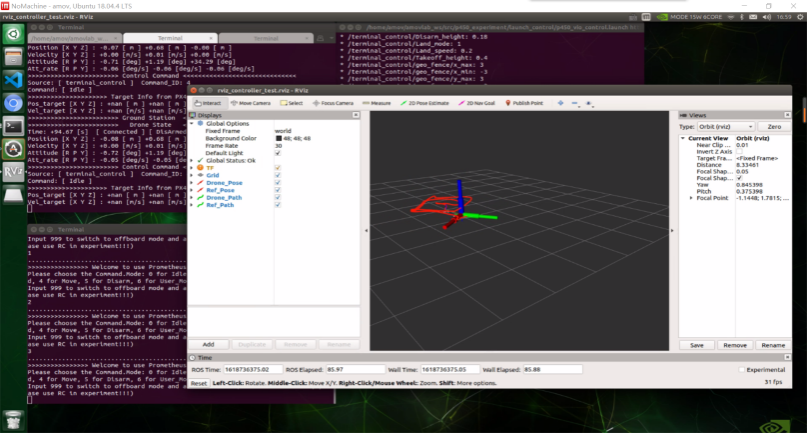
A: 盲猜可能是t265定位出问题了,我遇到过类似的情况,我之前拿起来晃一圈,轨迹闭环才敢飞 不然直接飘没了,先检查有没有用t265的yaw轴数据,那个velocity数据不要用,可能会炸机。
-
A:直接用camera trigger接单片机,电平捕获
-
Q25:那个vison velocity fusion是干嘛用的啊
A:速度融合
-
Q26:话说有没有稳定的降压模块给nx供电啊,我发现我这4s锂电池用12v降压模块,电池电量还有一半nx就关机了
A:用6s,但是比赛(全国大学生工程训练赛)要求17v电压以下只能4s。
-
Q27:单目相机得到的是像素点,怎样换算出它相对于无人机的x y位置呢?
A:结合超声波或者激光雷达模块,得到无人机对地高度,根据像素点流速公式得到无人机对地速度,这个速度和惯导进行积分融合,速度*单位时间就是单位位移xy方向
-
A:加了RTK会好一些
-
Q29:飞控惯导更精准一些相对自己的惯导,但是需要标定,关键问题是惯导数据和相机数据的同步怎样解决呢?
A:网上有类似的教程,可以搜索下,记得假如用飞控的imu的话频率调高一些,因为vins是两个数据读取一个,所以飞控imu调到200hz之后其实vins用的是100hz
-
A:nx或nuc,tx2的arm核比较菜,nuc比较稳,重量在600g左右,p200也带的动
-
A:按照source的顺序来,先全部注释,哪个解开注释后导致了有工作空间找不到的问题,就重新编译一次这个解开注释的工作空间因该就可以了
-
Q32:RGB-D相机推荐哪款啊?D435i和structure core比哪个比较好啊?
A:D435i吧,资料多一些
-
Q33:下载下来的px4代码版本过高怎么办?有办法降低代码版本吗?
A:git checkout v(低版本) 然后git submodule update –init --resur
-

A:安装pyseria
-
Q35:nano换源只有两个源,没有中国源,在终端添加也总失败
A:直接在source.list中改,参考教程:https://zhuanlan.zhihu.com/p/69849653
-
Q36:请问下飞控日志里能否读取无人机的位置信息啊?只有gps,gps会记录位置信息嘛?
A:日志里 本地NED位置信息可以搜索关键词local,全球位置信息可以搜索关键词global,gps精度几米左右,px4融合后精度0.5米左右
-
Q37:prometheus以后可能会兼容cv4,但是ROS melodic用cv4肯定是要改cv桥路径的,躲是躲不开了; 我把opencv3.3.1安到了/usr目录下,但是一直在找ros的opencv,是不是要安到/usr/local下,改prometheus的cmake里的opencv路径。还是卸载ros的opencv
A:直接把cmakelists里面的路径改了, find那里面改成 OpenCV 3 required, 原本是没有3的,Linux会通过系统环境变量优先找4的, Phill:安装路径没要求,别跟系统的东西混装,之后卸载麻烦,自己装的,塞到/usr/local里面
-
Q38:请问一下大家改过mavros输出的IMU频率吗,最高可以达到多少呢?
A: 试过200hz,实际180hz就不行了
-
Q39:为什么港科大的无人机路径规划飞得很平滑,而阿木的是一段一段飞的?
A: 如果只是发位置的话,那就是飞的一段一段飞,要是把轨迹的位置转化为无人机实时飞行的姿态环的话,那就是平滑飞
-
Q40:请问有人遇到同样的问题吗,编译Prometheus中的slam模块时cv_brige报错,如下图,我用的是xavier nx机载电脑,opencv版本是4.1.1
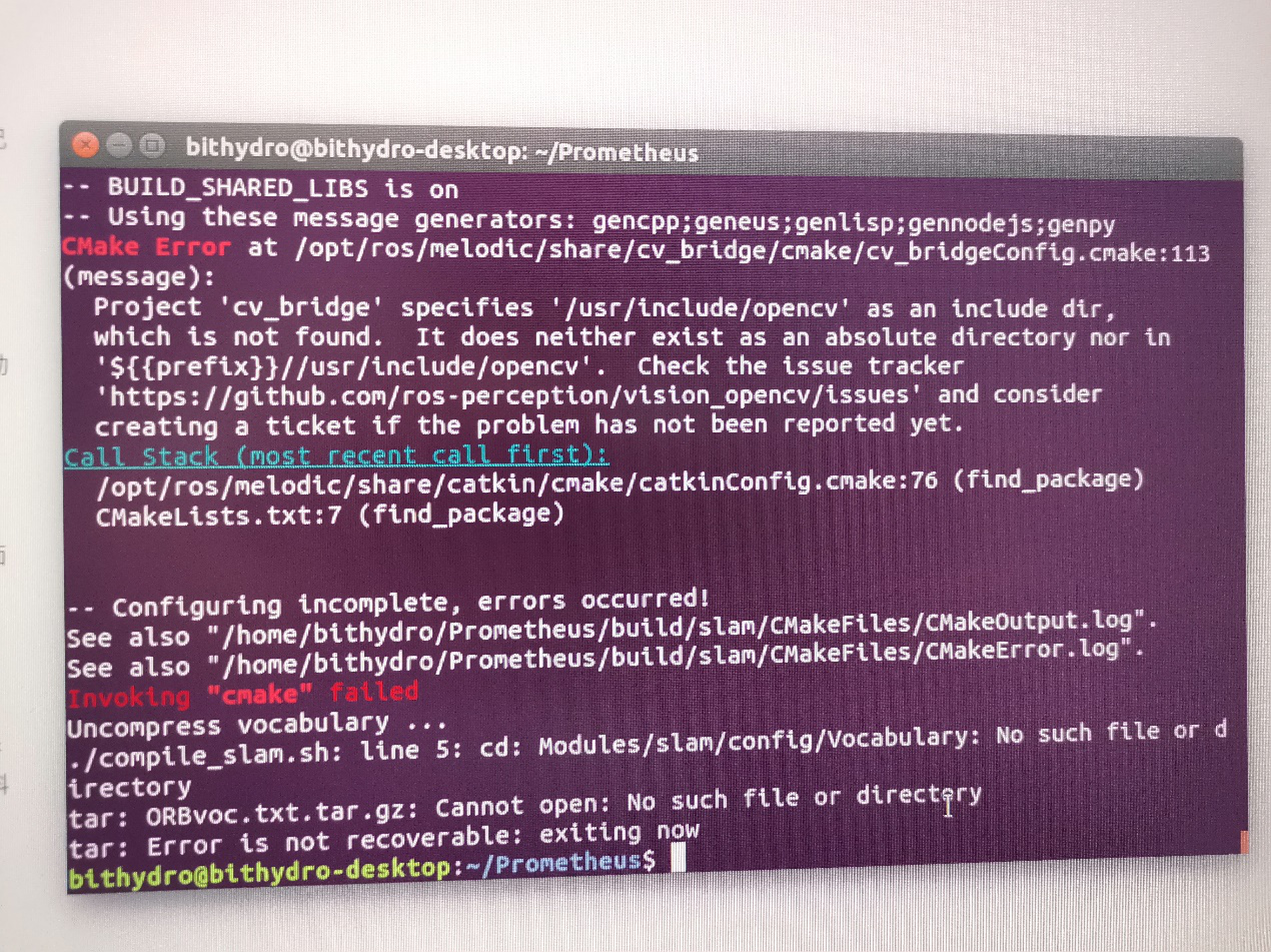
A:cv bridge里面把路径改了,默认支持的是3
-
A:波特率是设置的,端口号 ls /dev/tty*
-
Q42:我再详细解释一下哈~这里是三次飞行log数据;第一行第二行是融合之后的位置,第三行是uwb给的位置里程计。我在做定点飞行,飞行效果不好,飞机会漂移。但是观察数据发现,local position其实很稳,飞控觉得自己并没有漂移,如下图:

A: 怀疑是EKF2融合位置数据不够敏感,以至于飞机没感觉到自己飘走了,尽管uwb已经反映出来漂移情况了
-
Q43:prometheus里面的仿真运行时报错,飞机也没法起飞,是什么原因呢?MODE: Unsupported FCU [ WARN] [1615635403.059604673, 13328.328000000]: CMD: Command 400 -- wait ack timeout
A:需要打开src/Firmware/launch/mavros_posix_sitl.launch(如需使用其他launch文件修改方法类似)将这一行:<arg name="fcu_url" default="udp://:14540@localhost:14557"/>改成:<arg name="fcu_url" default="udp://:14540@127.0.0.1:14557"/>
-
Q44:问一下我的t265再rviz里显示正常,但在终端里一直报错是什么情况啊,报错如下图:
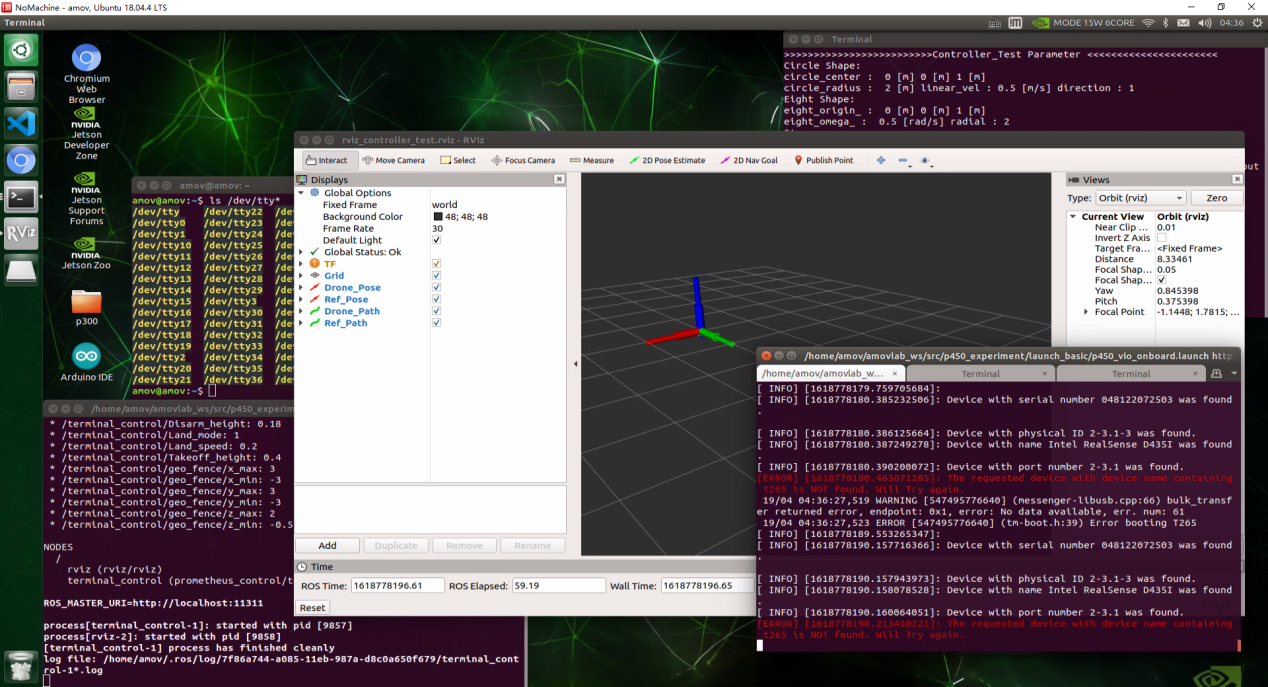
A:貌似是没找到设备,可以尝试t265拔了重插
-
Q45:请问一下,树莓派4B上可以运行promethes项目吗?
A:控制模块问题不大, opcv估计够呛