软件介绍
- 在板载计算机上面存在两套ROS包,一个是Prometheus功能包,另一个是实机启动p600_experiment功能包。
Prometheus软件框架及基本含义
-
Prometheus的软件框架如下图所示:
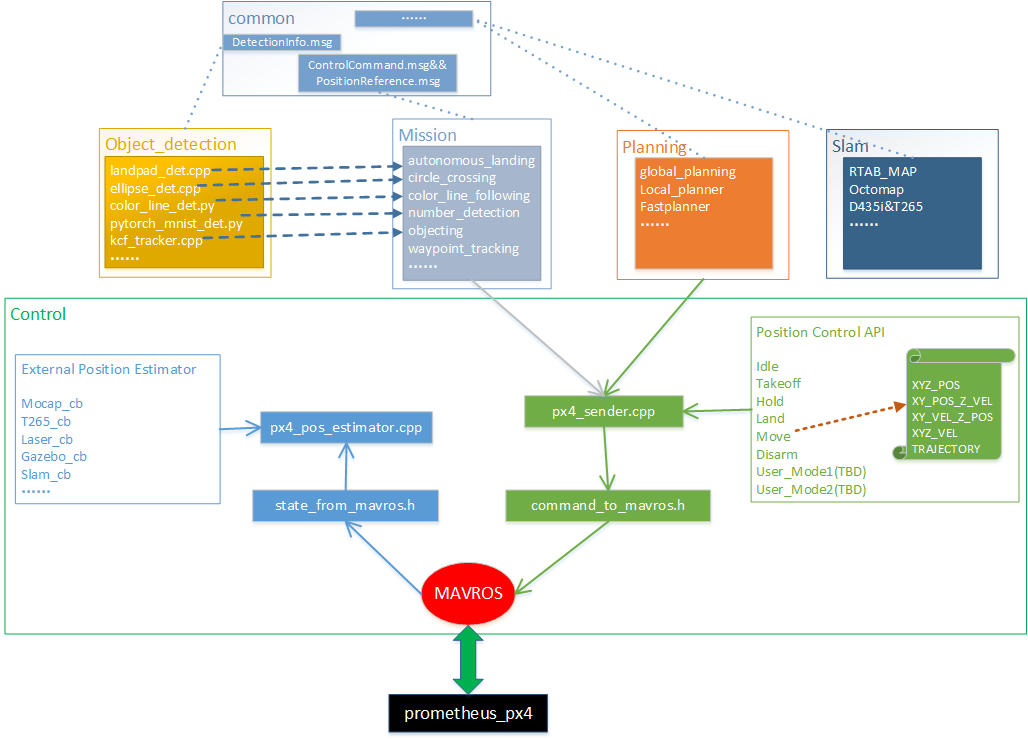
基本上分为以下几个模块:
-
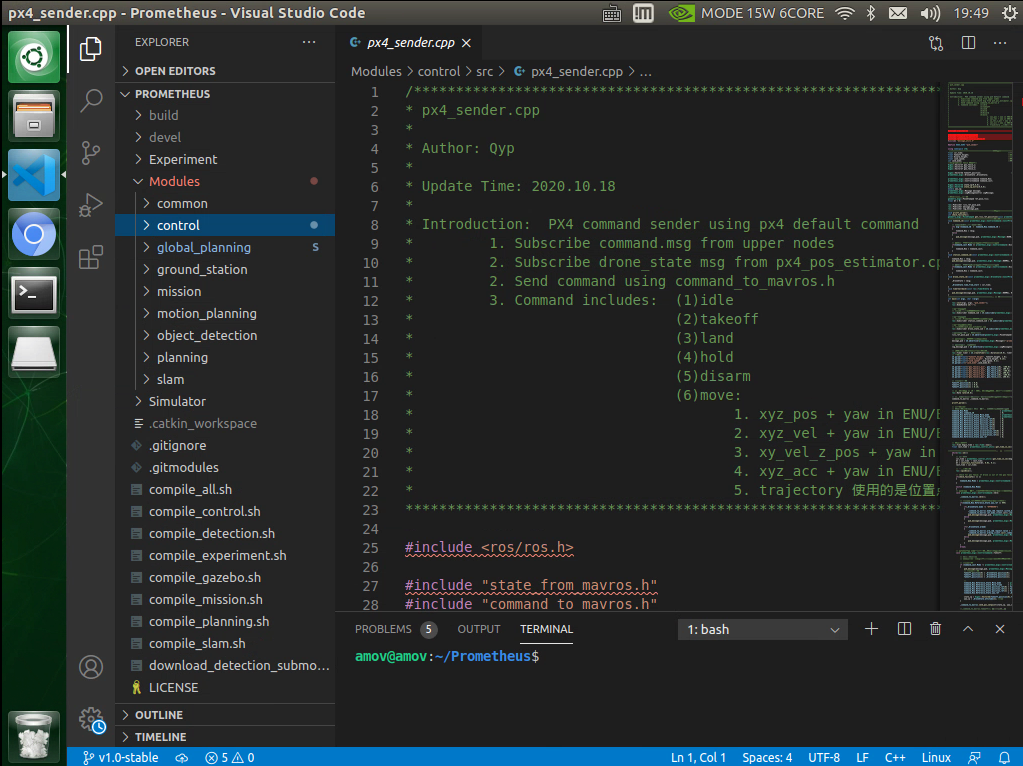
控制模块(Prometheus/Modules/control)
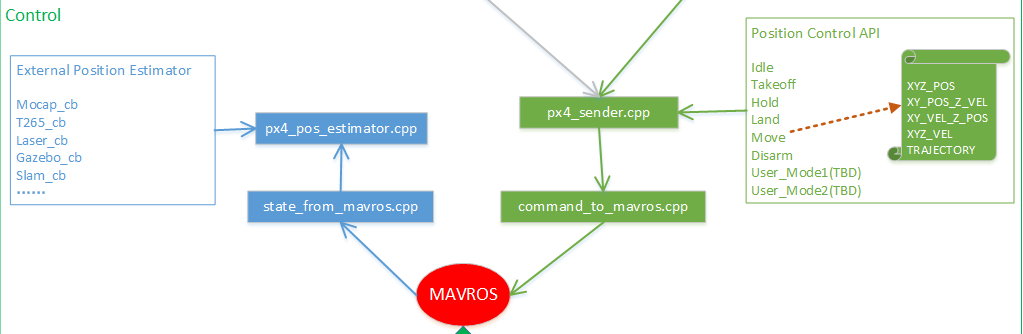
控制模块主要与MAVROS进行信息交互,分为两个部分,一部分是输入,一部分是输出。
-
px4_pos_estimator.cpp:主要将板载计算机处理之后的位置数据传给飞控,读取飞控当前的状态信息。
-
px4_sender.cpp:主要将控制指令接口通过px4_sender发送给mavros,从而控制飞机进行相应的动作指令。
支持的为板载计算机提供位置的数据来源有:动捕系统mocap,英特尔T265双目相机,激光雷达定位建图,仿真器gazebo提供模型位置数据,以及SLAM提供位置数据。
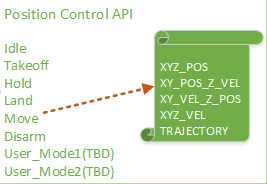
提供的控制飞机的接口API(如图):
-
Idle(怠速):意思就是飞机会进入offboard模式,但是在该模式下,没有对飞机进行任何指令的发送。飞机也不会有任何动作。这个指令一般也可以不用。
-
Takeoff(起飞):起飞点为当前点,起飞高度通过 yaml参数设置,单位是米。默认起飞高度是0.5m。
-
Hold(悬停):飞机正在飞行过程中如果接受到 2 指令,会在当前时刻进入悬停状态。
-
Land(降落):降落速度通过 yaml参数设置,单位是m/s ,默认降落速度为0.2m/s 。还有一个 上锁高度到达上锁高度之后飞机会进入飞控的本身降落模式进而缓缓着地,上锁高度通过 yaml 参数进行设置,单位是米,默认是 0.18m,即认为离地不到20cm的时候进入降落飞行模式。
-
Move:该模式就包含我们所称的指点飞行功能,在此模式下,又有5种子模式:
-
XYZ_POS:空间位置控制
-
XY_POS_Z_VEL:水平面位置控制高度速度控制
-
XY_VEL_Z_POS:水平面速度控制高度定高控制
-
XYZ_VEL:空间速度控制
-
TRAJECTORY:轨迹跟踪控制
-
-
规划模块(Prometheus/Modules/planning)
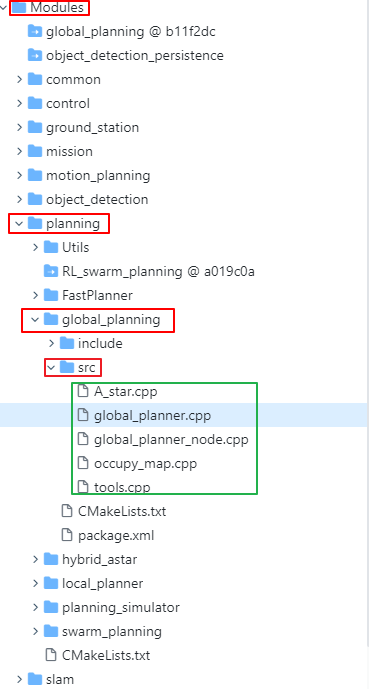
目前实际使用的规划模块是全局规划模块,使用的是A星算法(绿色框选部分)。
-
A_star.cpp :为A星算法的实现
-
global_planner.cpp :为全局规划策略主节点
-
occupy_map.cpp:栅格地图处理,根据膨胀系数,生成安全距离
-
SLAM模块(Prometheus/Modules/slam)
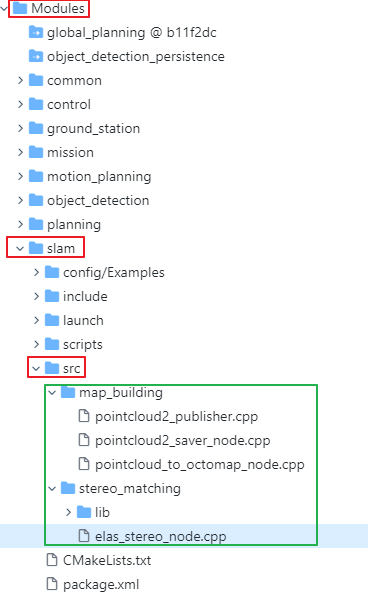
SLAM模块一块为建图模块,另一块为定位模块。
绿色框选部分为建图模块:
-
pointcloud_to_octomap_node.cpp:订阅点云数据,发布八叉树栅格地图
-
elas_stereo_node.cpp:调用双目匹配算法,计算出稠密视差图,生成深度图,发布全局点云
目前板载计算机所搭载的相机包括有D435i和T265,可以利用realsense-ros官方提供的功能包实现RTAB-Map建图。
另外一部分为定位模块:
-
定位模块目前是使用的是T265本身输出的slam结果,具体调用可查看控制模块中的px4_pos_estimator.cpp细节处理。
-
目标检测模块(Prometheus/Modules/object_detection)
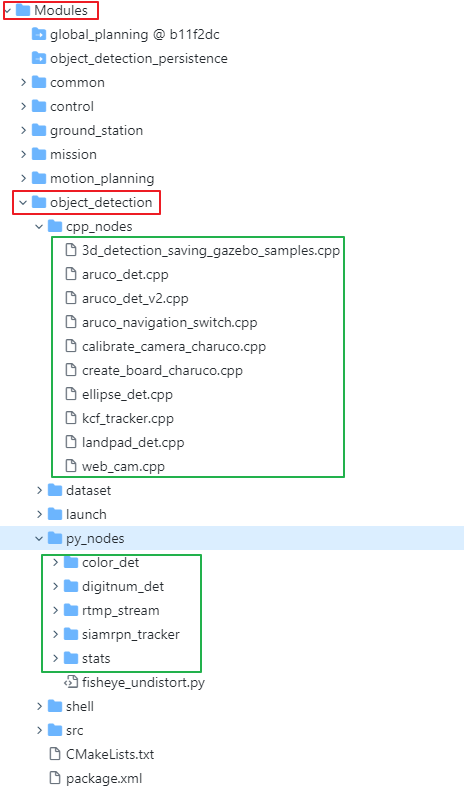
目标检测模块比较多(绿色框选部分)
-
web_cam.cpp:USB相机发布ROS话题
-
ellipse_det:椭圆检测处理节点
-
kcf_tracker.cpp:框选跟踪节点
-
landpad_det.cpp:降落板检测
-
color_det:颜色识别节点
-
digitnum_det:手写数字识别节点
目前常用就这些,还有很多其他的识别节点,更多请详细Prometheus开源项目仔细查看。
-
任务模块(Prometheus/Modules/mission)

该模块属于上层应用模块,具体实现哪一种功能。
-
autonomous_landing:自主降落程序
-
circle_crossing:圆形穿框(在真实飞机中简单修改策略,实现圆形跟踪
-
color_line_following:颜色巡线
-
number_detection:数字识别无人机跟踪
-
object_detection:无人机目标框选KCF跟踪
-
planning_mission:路径规划的航点处理(多航点,单航点,多机航点,qgc航点读取)
-
waypoint_tracking:航点跟踪节点(类似与走一个四边形,走其他航线图形)
还有很多具体的应用型节点,这些节点都是对control,object_detection,planning等等各个模块的结合使用,如果想学习如何调用API接口,可以参考其中的代码实现。
-
公用模块(Prometheus/Modules/common)
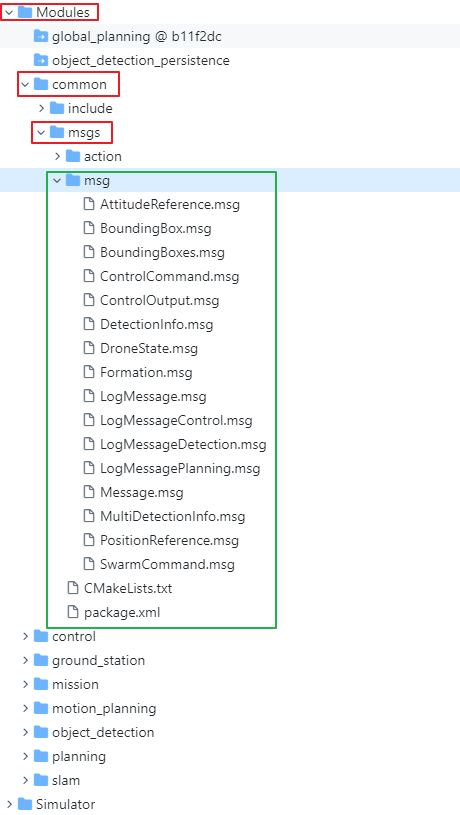
公用模块中比较核心的就是自定义的msg消息,定义的msg如上图绿色框选所示
-
ControlCommand.msg:控制无人机指令的msg格式,掌握API首先掌握msg定义
-
DetectionInfo.msg:目标检测模块的输出结果
-
DroneState.msg:无人机当下各个状态信息(与板载计算机是否通信连接,解锁或者上锁,当前飞行模式,当前的状态量位置速度加速度及姿态)
-
LogMessageControl.msg:控制端的日志打印信息记录
等等还有很多的自定义msg,规划模块,多机模块的,更多细节可以在板载计算机中查看Prometheus代码或者在Prometheus开源Github上查看。
-
下面附上在板载计算机中Prometheus的代码目录框架×
p600_experiment功能包使用及含义
-
p600_experiment功能包是适配prometheus开源代码的实机闭源功能包。
该文件位置:amovlab_ws/src/p600_experiment
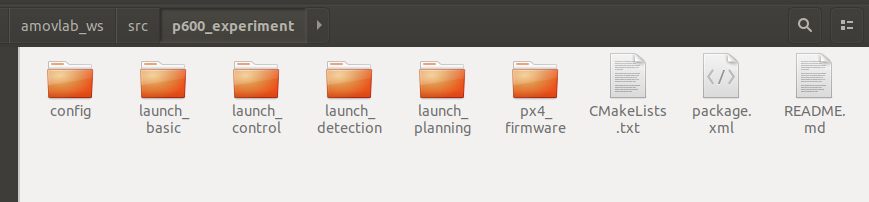
此功能包主要包含
-
参数配置文件config
-
基本的launch文件launch_basic
-
控制相关的launch文件launch_control
-
目标检测相关的launch文件launch_detection
-
路径规划相关的launch文件launch_planning
-
飞控的固件和参数文件px4_firmware
接下来分别从上面各个文件阐述文件里面的内容
-
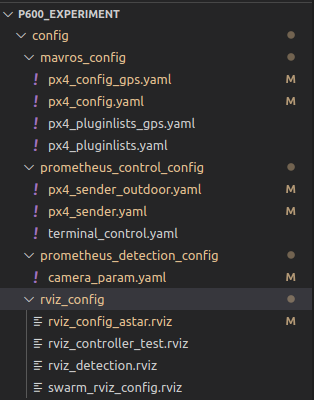
mavros_config:对mavros相关参数的配置(分为室内一组,室外一组)
-
室内:
-
px4_config.yaml
-
px4_pluginlists.yaml
-
-
室外:
-
px4_config_gps.yaml
-
px4_pluginlists_gps.yaml
-
-
-
launch_basic
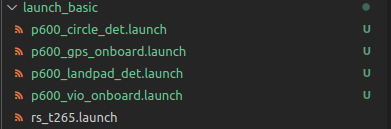
p600_circle_det.launch: 圆框检测launch文件
p600_gps_onboard.launch: 室外GPS定点launch文件
p600_landpad_det.launch: 二维码检测launch文件
p600_vio_onboard.launch: 室内T265定点launch文件
rs_t265.launch: T265启动launch文件
-
launch_control

p600_gps_control.launch: 室外GPS指点launch文件
p600_vio_control.launch: 室内T265指点launch文件
-
launch_detection
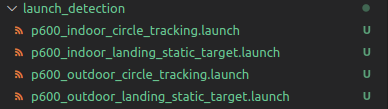
p600_indoor_circle_tracking.launch: 室内圆框跟踪launch文件
p600_indoor_landing_static_target.launch: 室内二维码降落launch文件
p600_outdoor_circle_tracking.launch: 室外圆框跟踪launch文件
p600_outdoor_landing_static_target.launch: 室外二维码降落launch文件
-
launch_planning
-
室内避障launch文件:
astar_onboard.launch
astar_ground.launch
tf_transform.launch
-
室外避障launch文件:
astar_onboard_gps.launch
astar_ground_gps.launch
tf_transform_gps.launch