飞行控制模块
-
请按以下步骤操作
注意!
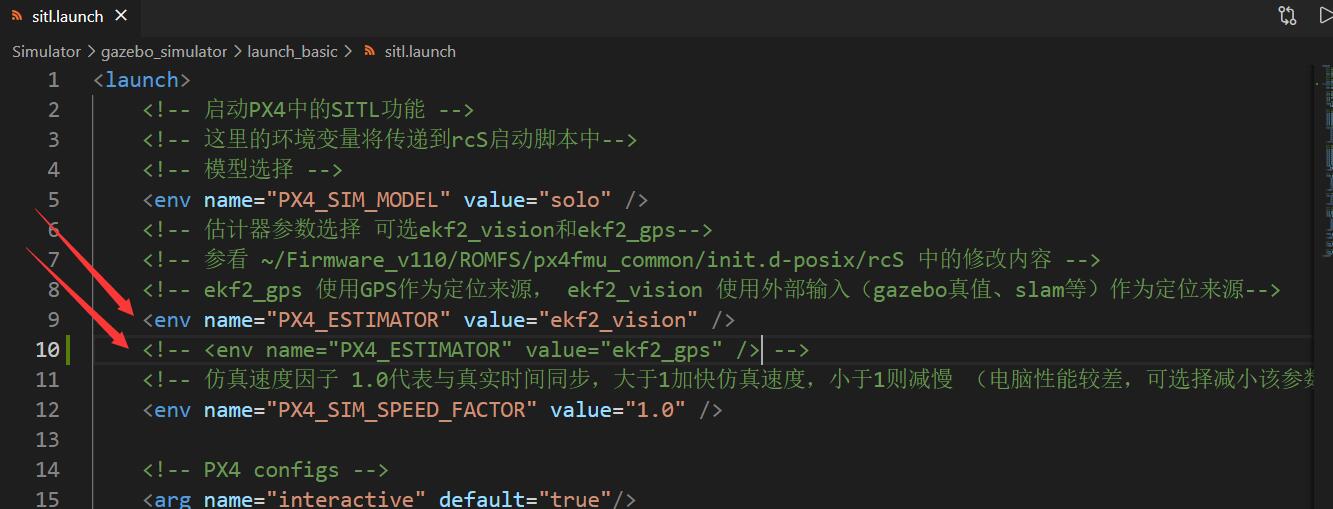
估计器参数PX4_ESTIMATOR默认是ekf2_vision,估计器参数选择可选ekf2_vision和ekf2_gps,ekf2_gps 使用GPS作为定位来源,ekf2_vision 使用外部输入(gazebo真值、slam等)作为定位来源
1.室内仿真
-
在终端输入以下命令
roslaunch prometheus_gazebo sitl_control.launch</code>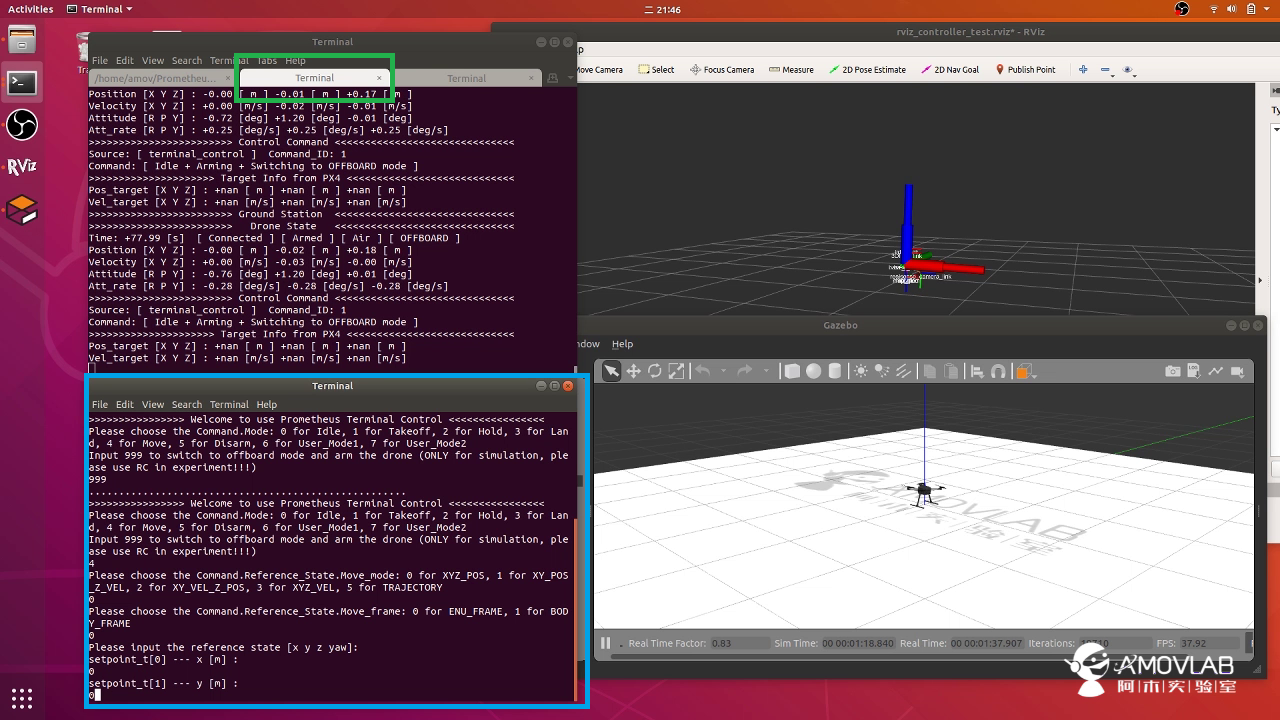
注意!
此场景下的估计器参数PX4_ESTIMATOR是ekf2_vision,ekf2_vision 使用外部输入(gazebo真值、slam等)作为定位来源 -
重要
-
应用启动后如上图所示,其中被绿框圈中的是无人机地面站信息,被蓝框圈中的是控制终端(全自主的offboard控制)。运行之后需要在控制终端选择使用command input control(通过输入目标点的方式控制) 或者keyboard input control(通过键盘控制)两种方式
command input control 模式下,首先输入999解锁并切换至offboard模式,然后输入1起飞,然后再根据提示输入其他指令(悬停、降落、机体系移动、惯性系移动、轨迹追踪等等)
keyboard input control 模式下,1 for Arm, Space for Takeoff, L for Land, H for Hold, 0 for Disarm, 8/9 for Trajectory tracking Move mode is fixed (XYZ_VEL,BODY_FRAME): w/s for body_x, a/d for body_y, k/m for z, q/e for body_yaw
-
首先输入999解锁并切换至offboard模式
-
输入4选择移动模式
-
输入0选择XYZ_POS(发送坐标指令)
-
输入0选择ENU_FRAME
-
输入X轴的距离(m)
输入Y轴的距离(m)
输入Z轴的距离(m)
输入yaw角度(0-360°)
-
-
在ENU_FRAME下,无人机飞行到指定位置
-
输入4选择移动模式
-
输入0选择XYZ_POS(发送坐标指令)
-
输入1选择BODY_FRAME
-
输入X轴的距离(m)
输入Y轴的距离(m)
输入Z轴的距离(m)
输入yaw角度(0-360°)
-
-
在BODY_FRAME下,无人机飞行到指定位置
-
输入4选择移动模式
-
输入3选择XYZ_VEL(发送速度指令)
-
输入0选择ENU_FRAME
-
输入X轴的速度(m/s)
输入Y轴的距离(m/s)
输入Z轴的距离(m/s)
输入yaw角速度(rad/s)
-
-
在ENU_FRAME下,无人机按照指定速度飞行
-
输入4选择移动模式
-
输入3选择XYZ_VEL(发送速度指令)
-
输入1选择BODY_FRAME
-
输入X轴的速度(m/s)
输入Y轴的距离(m/s)
输入Z轴的距离(m/s)
输入yaw角速度(rad/s)
-
-
在BODY_FRAME下,无人机按照指定速度飞行
-
输入4选择移动模式
-
输入5选择TRAJECTORY
-
输入0选择Circle
-
输入运行时间(s)
-
输入1选择Eight Shape
-
输入运行时间(s)
-
输入2选择Step
-
输入运行时间(s)
-
-
-
演示视频
2.室外仿真
-
演示视频
注意!
此场景下的估计器参数PX4_ESTIMATOR是ekf2_gps,ekf2_gps 使用GPS作为定位来源注意!
控制方式与室内仿真一样