圆叉降落
注意
在高度数据不准时,有时候会出现降落后,无人机无法上锁的问题。针对这种情况,请手动切出OFFBOARD模式(遥控器最右边的打到最上方),手动上锁。此BUG正在修复,请等待通知。
1.启动指令
- 小吊舱G1启动指令
roslaunch p600_experiment p600_circlex_landing_g1.launch
- 大吊舱Q10f启动指令
roslaunch p600_experiment p600_circlex_landing_q10f.launch
2.圆叉降落实现
1.运行圆叉降落launch文件,然后手动解锁起飞到一定高度(以小吊舱G1为例)

2.依次检查六个终端打印信息均正常、无报错后,在最后一个端口输入1或2来选择吊舱控制模式(yaw+pitch 或 roll+pitch 区别在于控制的轴不同,yaw+pitch时吊舱只有yaw和pitch轴会运动,roll保持0度。同理roll+pitch时,yaw保持0度)
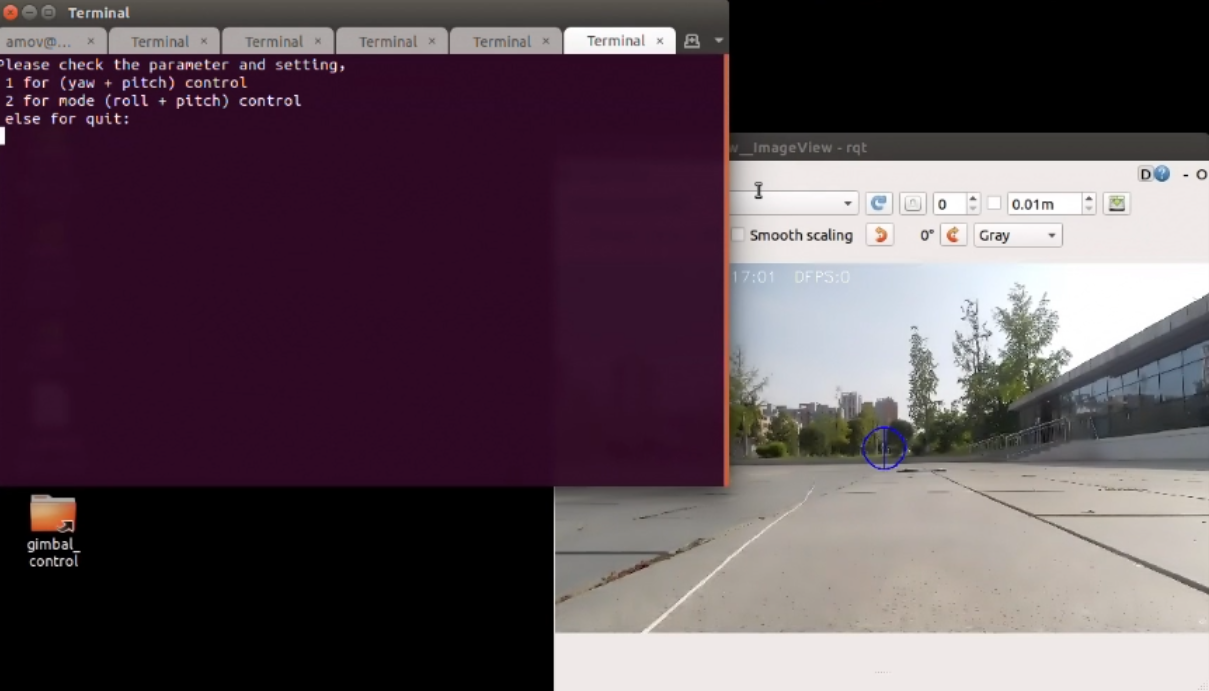
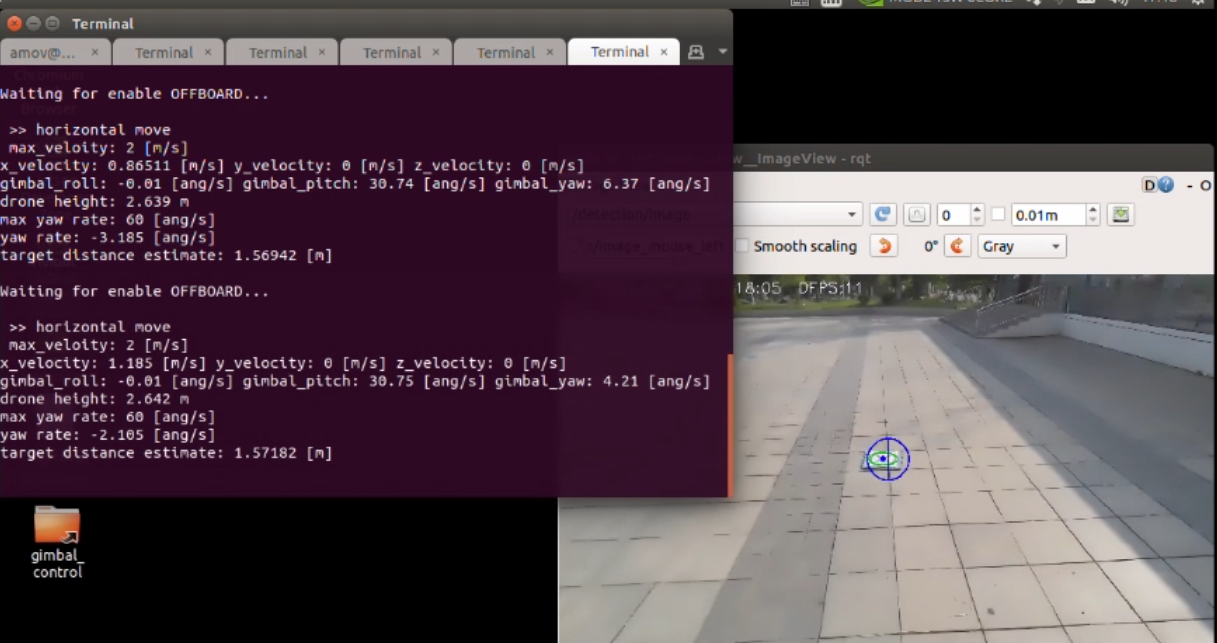
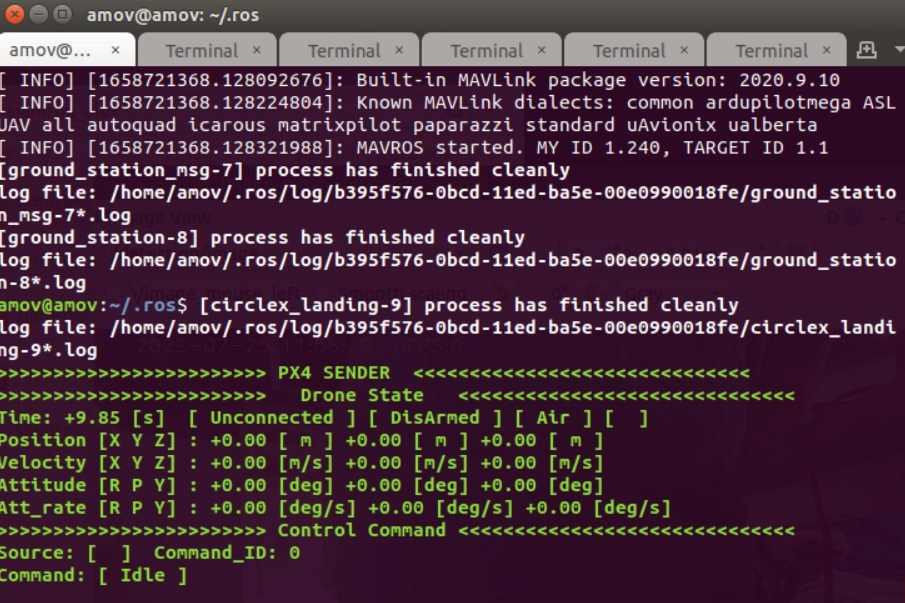
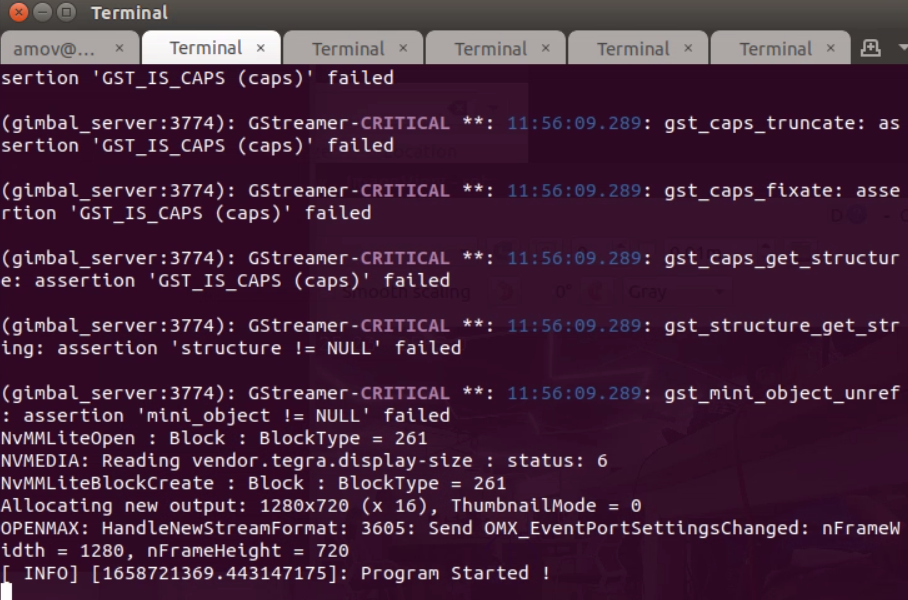
3.观察无人机是否检测到目标,观察终端数据是否异常(比如X_VELOCITY等速度值是否过快,防止产生意外)
4.切换offboard模式,无人机会向圆叉降落版移动,并完成降落
3.终端讲解
(第四、五窗口为数据接收窗口,不做讲解)
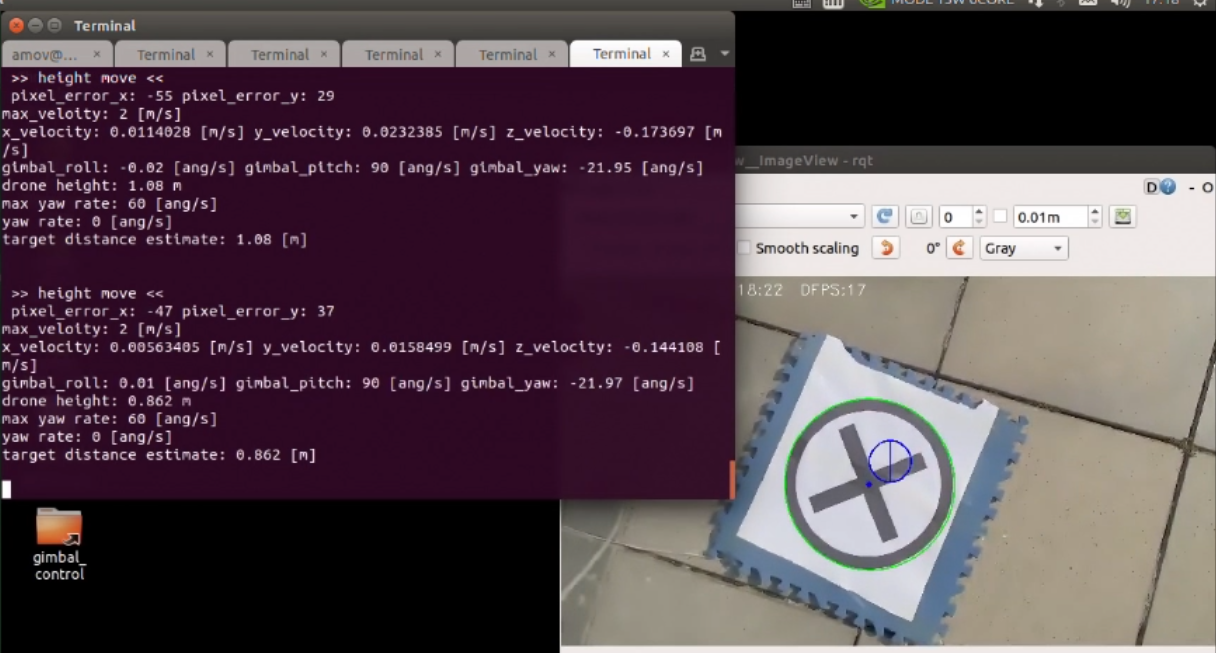
- launch文件运行的窗口可实时反映出px4_sender节点反馈的相关信息,例如速度信息,加速度信息,位姿信息等
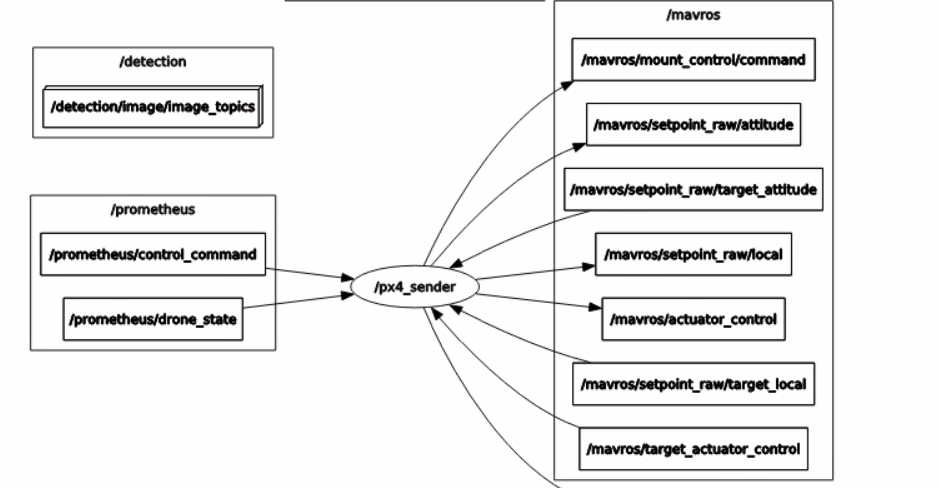
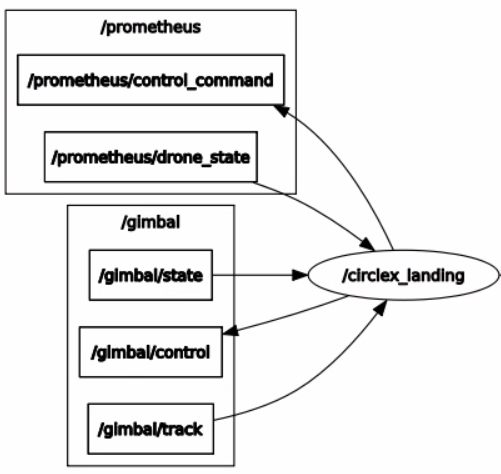
2.左边第二个窗口可云台控制节点,实现吊舱角度控制,速度控制功能,发布图形等功能
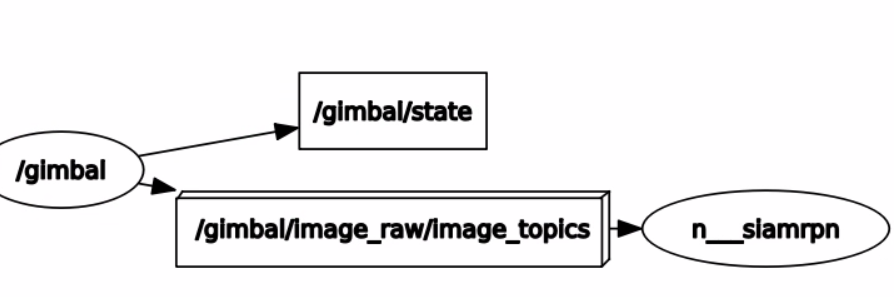
- 左边第三个窗口订阅吊舱画面ros话题,对检测的圆叉目标数据进行解算,发布误差量发布给吊舱追踪话题

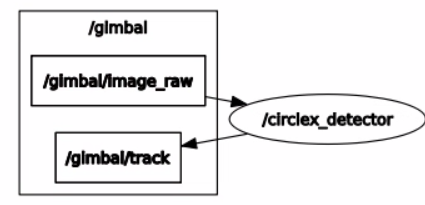
4.最后一个窗口选择吊舱追踪的控制模式,订阅吊舱信息及追踪信息,解算后发布信息给吊舱控制及无人机控制话题