目标检测模块
自主降落(静止目标)
-
请按照以下步骤操作
注意!
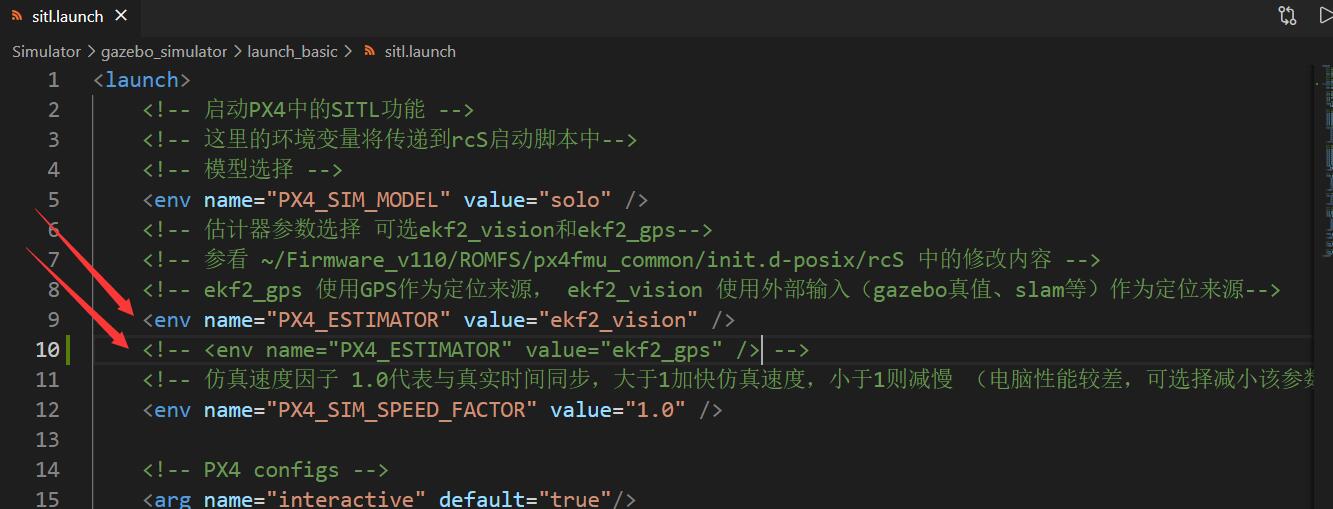
估计器参数PX4_ESTIMATOR默认是ekf2_vision,估计器参数选择可选ekf2_vision和ekf2_gps,ekf2_gps 使用GPS作为定位来源,ekf2_vision 使用外部输入(gazebo真值、slam等)作为定位来源 -
1.室内仿真
注意!
此场景下的估计器参数PX4_ESTIMATOR是ekf2_vision,ekf2_vision 使用外部输入(gazebo真值、slam等)作为定位来源在终端输入以下命令
roslaunch prometheus_gazebo sitl_landing_static_target.launch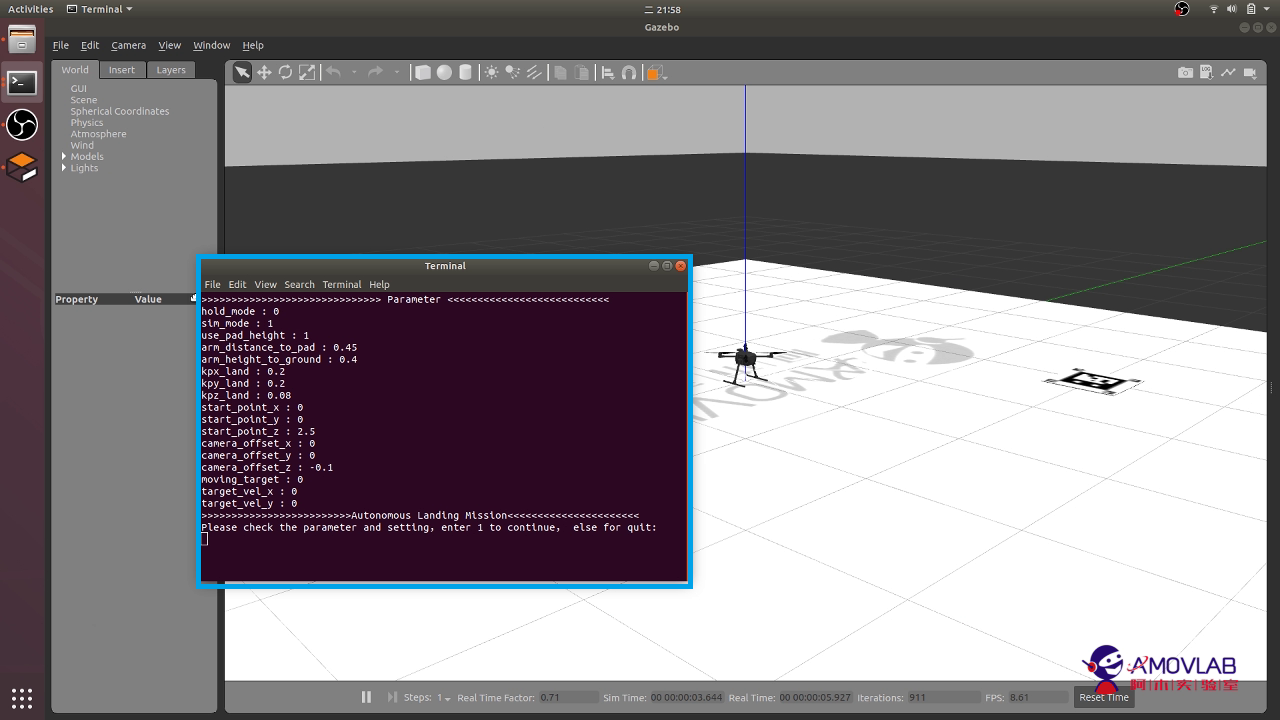
重要!
应用启动后如上图所示,其中被蓝框圈中的是控制终端。根据提示,输入1选择继续
重要!
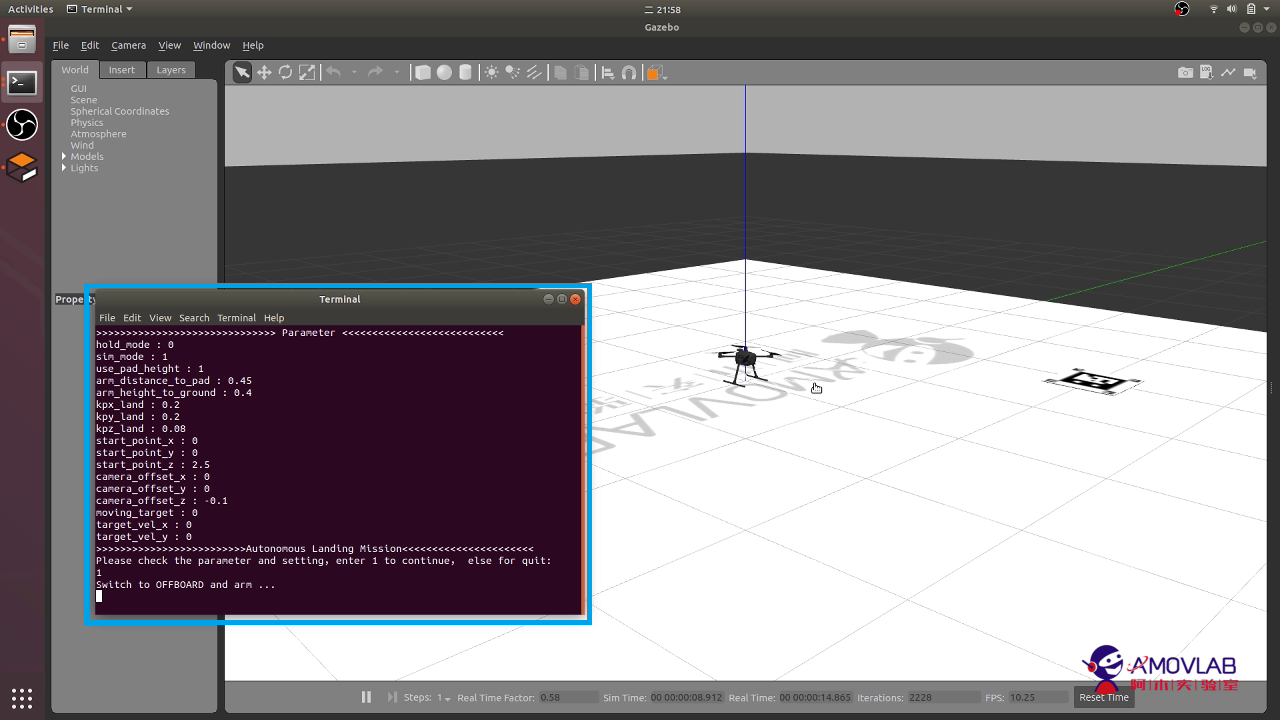
输入1后如上图所示,其中被蓝框圈中的是显示的无人机位置信息等。
-
演示视频
-
2.室外仿真
注意!
此场景下的估计器参数PX4_ESTIMATOR是ekf2_gps,ekf2_gps 使用GPS作为定位来源注意!
控制方式与室内仿真一样
圆形识别与圆形穿越
-
请按以下步骤操作
注意!
估计器参数PX4_ESTIMATOR默认是ekf2_vision,估计器参数选择可选ekf2_vision和ekf2_gps,ekf2_gps 使用GPS作为定位来源,ekf2_vision 使用外部输入(gazebo真值、slam等)作为定位来源 -
1.室内仿真
注意!
此场景下的估计器参数PX4_ESTIMATOR是ekf2_vision,ekf2_vision 使用外部输入(gazebo真值、slam等)作为定位来源在终端输入以下命令
roslaunch prometheus_gazebo sitl_circle_crossing.launch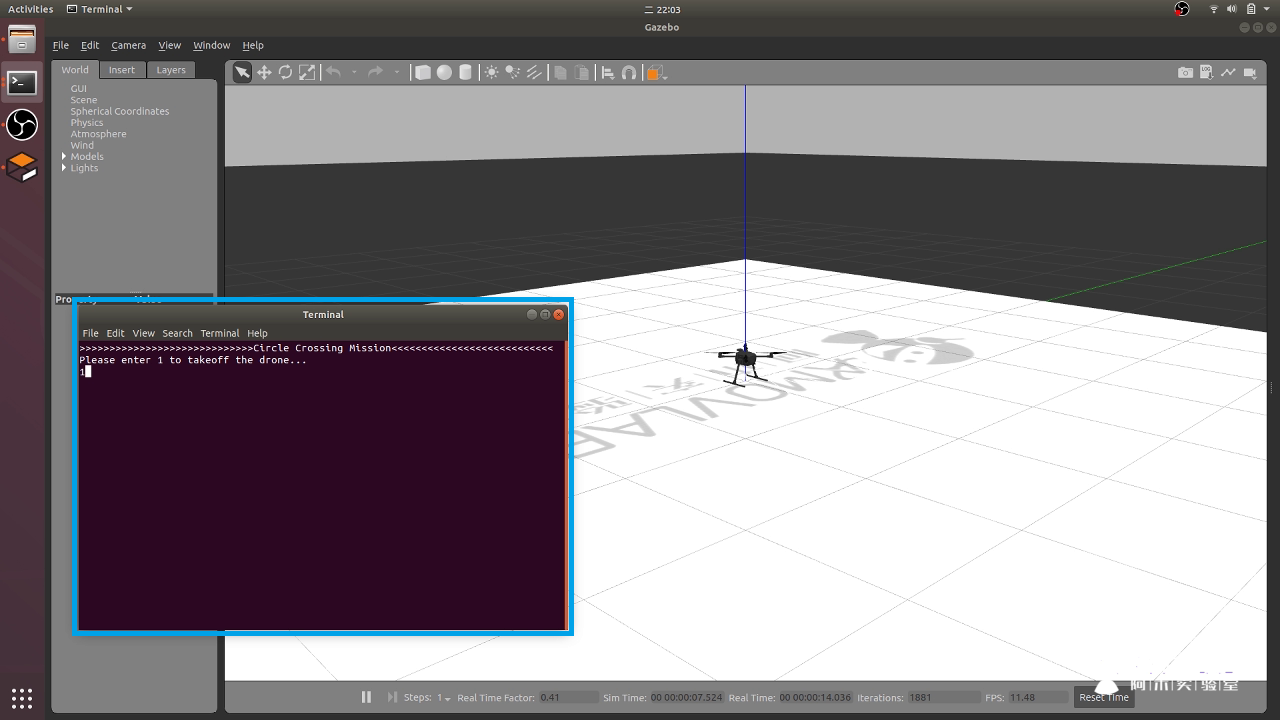
小技巧:
应用启动后如上图所示,其中被蓝框圈中的是控制终端。根据提示,输入1选择开始
演示视频
-
视频演示如下:
-
2.室外仿真
注意!
此场景下的估计器参数PX4_ESTIMATOR是ekf2_gps,ekf2_gps 使用GPS作为定位来源注意!
控制方式与室内仿真一样
演示视频
-
视频演示如下: