吊舱控制
- 本节介绍吊舱控制包的使用,仅适用于吊舱开发套件(TX板)和P600无人机(NX板)使用. 演示怎么单独运行吊舱的键盘控制和吊舱跟踪.
键盘控制
-
3轴控制, 缩放控制,变焦控制,视频拍摄(小吊舱无变焦缩放功能)
cd /home/amov/gimbal_control chmod +x *.sh chmod +x src/gimbal_control/scripts/control_server.py # 小吊舱G1 ./test_keyboard_control_g1.sh # 大吊舱Q10f ./test_keyboard_control_q10f.sh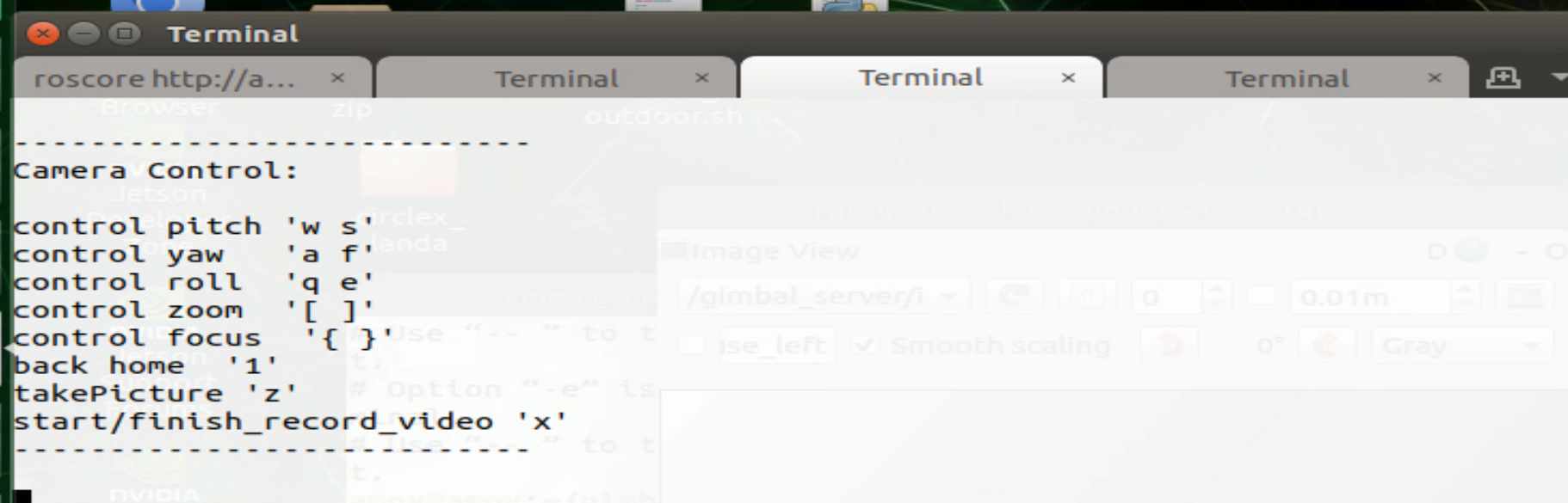
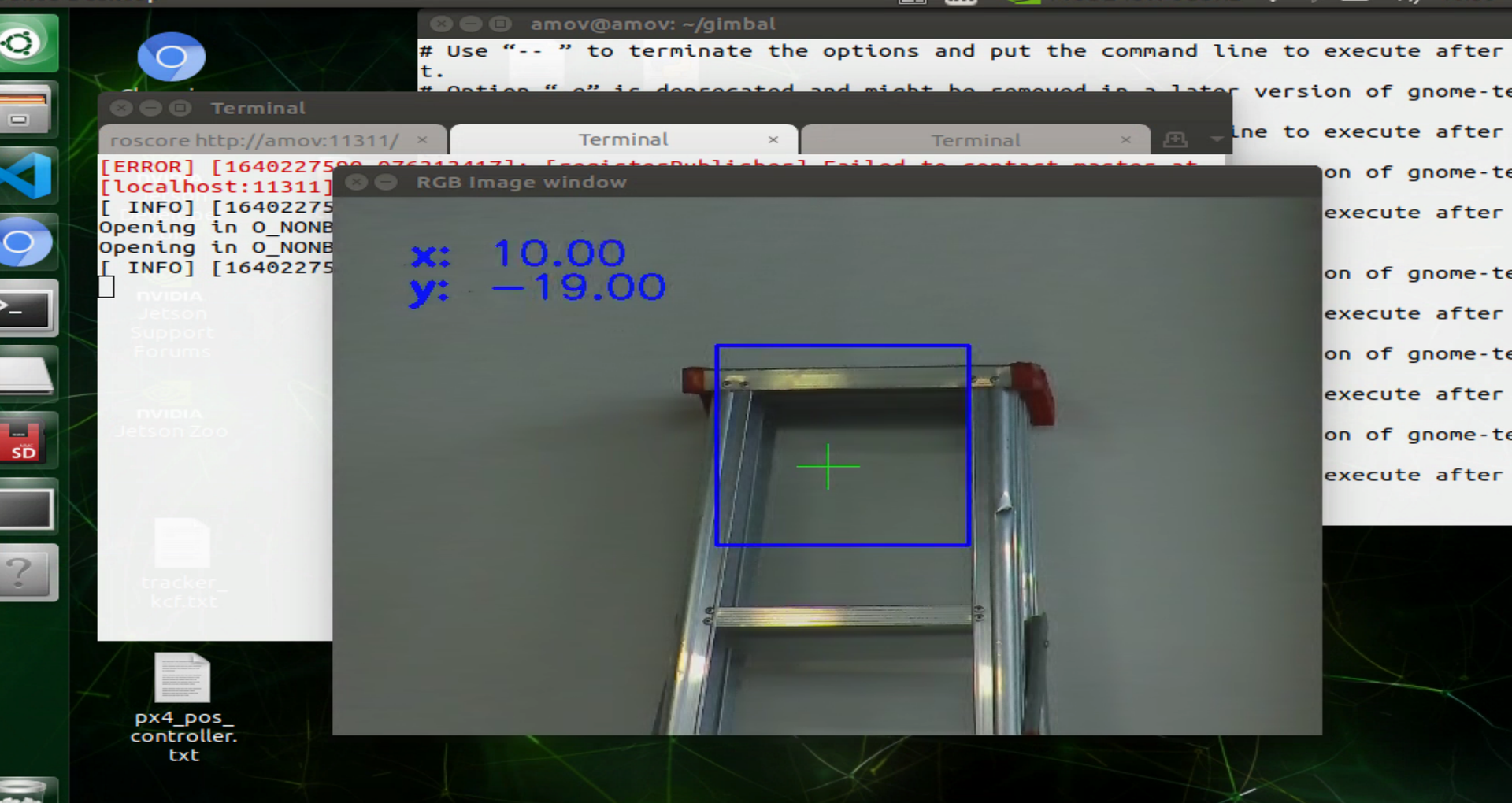
吊舱跟踪
-
跟踪时自动缩放(小吊舱无变焦缩放功能)
cd /home/amov/gimbal_control chmod +x *.sh chmod +x src/gimbal_control/scripts/control_server.py # 小吊舱G1 ./test_kcf_g1.sh # 大吊舱Q10f ./test_kcf_q10f.sh -
框选一个较小的目标

-
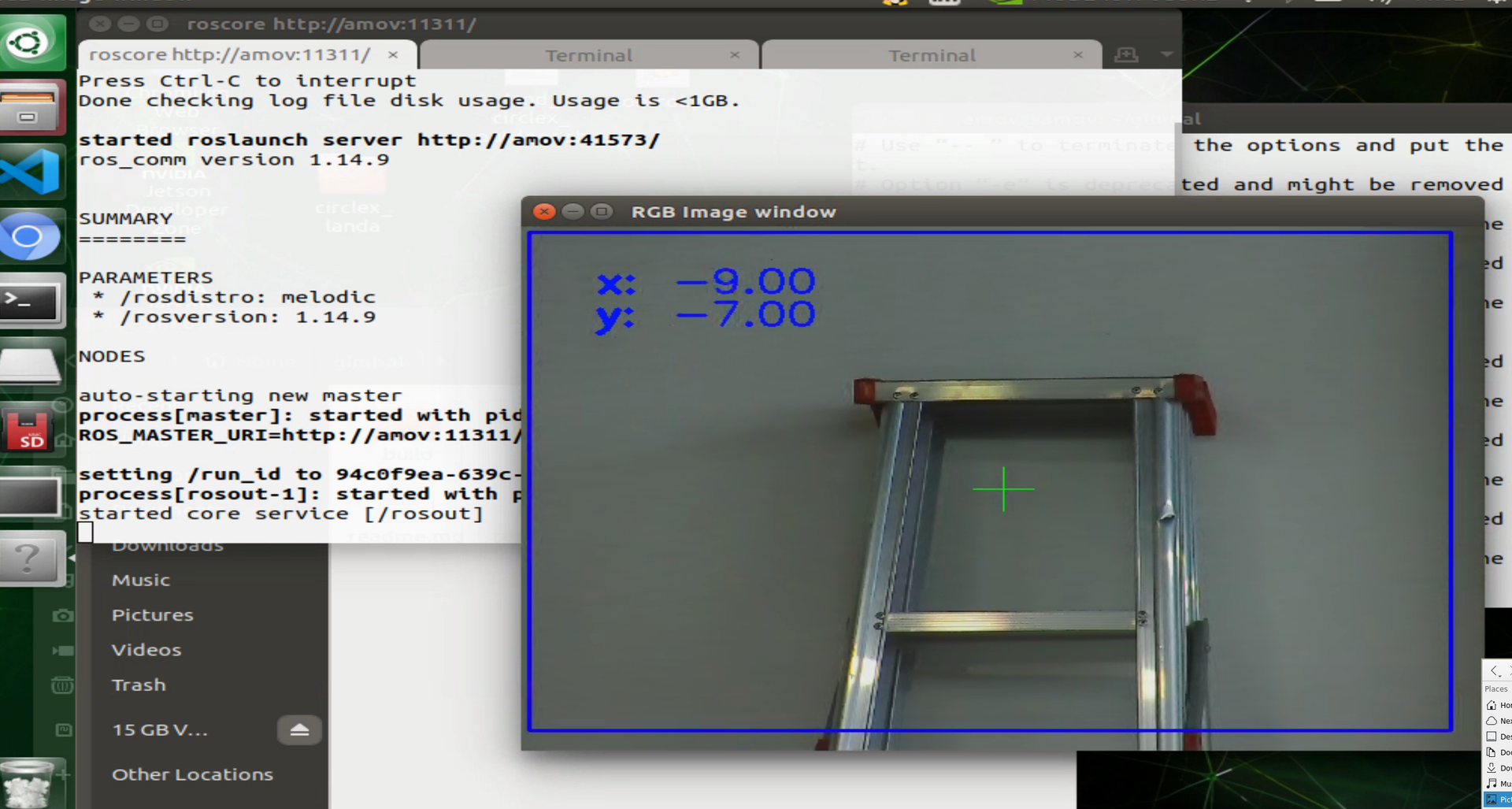
之后,自动放大
-
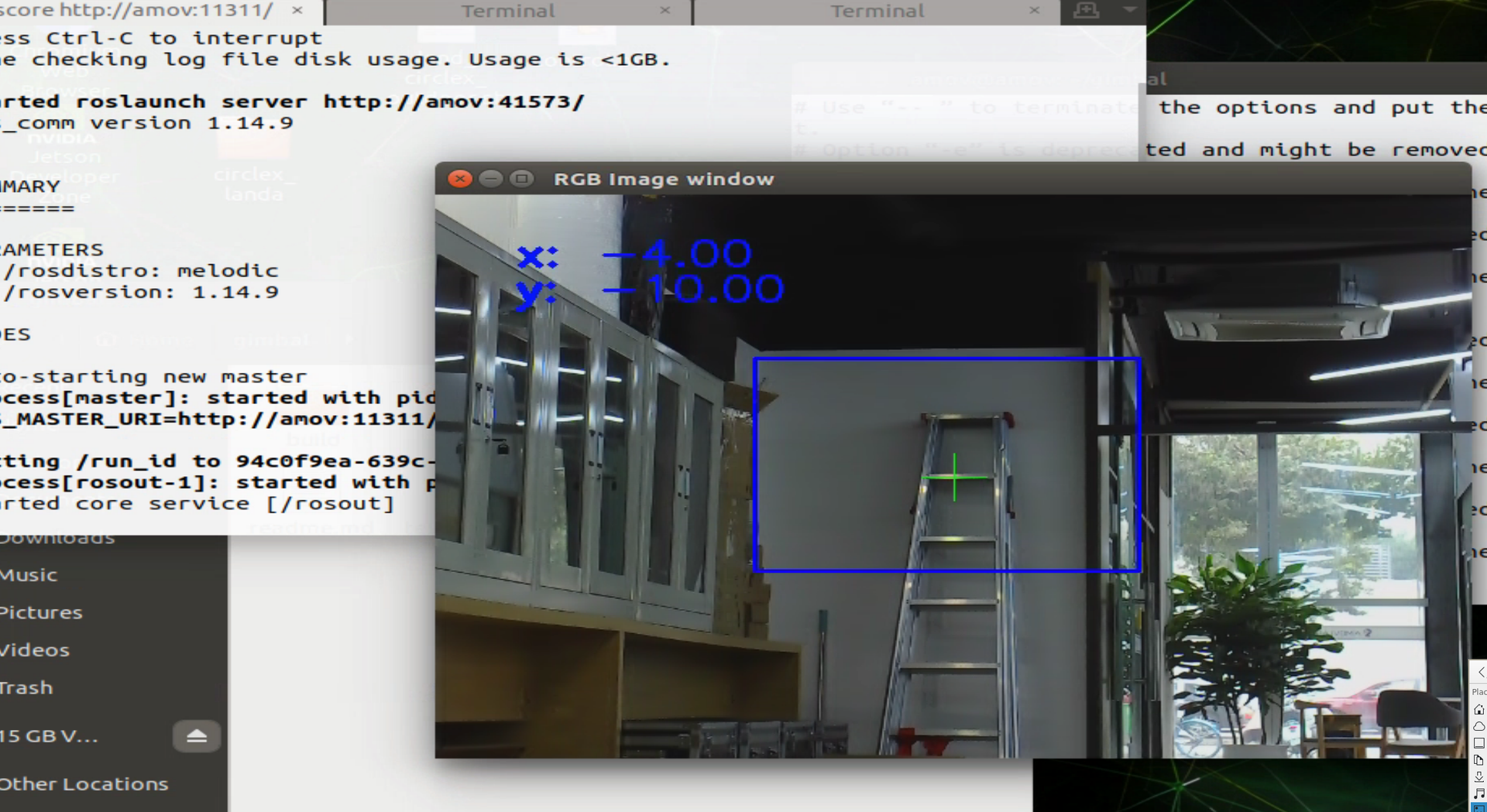
框选一个较大的目标
-
之后,自动缩小
常见问题
-
无法打开摄像头、摄像头不存在、OpenCV Error、Unable to open Serial Port ! Or Unable to open Camera
- 吊舱断电重启
- 拔插控制吊舱的USB线
-
检查吊舱控制线是否在正确位置,参见USB插口说明
-
关闭跟踪中自动缩放 在
test_kcf.sh改_auto_zoom:=true为_auto_zoom:=falserosrun gimbal_track tracker_kcf _auto_zoom:=false _max_size:=0.3 _min_size:=0.1
功能
- 视频录制,图片拍摄
- 速度,角度3轴混合控制
- 基于面积反馈的自动缩放
- 视频推流
- 电机姿态,IMU姿态/速度,镜头倍速反馈
- 吊舱跟踪