飞行模式设置
飞行模式介绍
手动模式
-
ARCO:特技模式
遥控器输入被转换为横滚、俯仰和偏航速度,当摇杆回中时飞行器不会保持平衡,可以用于翻滚等特技飞行。
-
RATTITUDE:角速率模式
遥控器输入在极限区域被转换为横滚、俯仰的角度和偏航的速度,否则被转换为横滚、俯仰和偏航角度。
-
STABILIZED:稳定模式
遥控器输入被转换为横滚、俯仰的角度和偏航的速度,当摇杆回中后飞行器会保持平衡,之后会随风或其他因素漂移。
辅助模式
-
ALTITUDE CONTROL:高度模式横滚、俯仰和偏航的输入与手动模式一致;当摇杆在~50%油门左右,飞行器将保持当前高度;油门有一个很大的死区,超出后控制上升或下降速度。参数:MPC_Z_VEL_MAX_UP:最大上升速度,默认3.0m/s。MPZ_Z_VEL_MAX_DOWN:最大下降速度,默认1.0m/s。RCX_DZ:X通道(油门通道,由RC_MAP_THROTTLE设定)的死区;MPC_XXX:影响飞行表现的参数,例如MPC_THR_HOVER定义飞行器悬停的油门。
-
POSITION CONTROL:位置模式横滚控制左右移动速度、俯仰控制前后移动速度,当摇杆回中时飞行器会保持位置;偏航控制速度,与手动模式一致;油门控制上升或下降的速率,与ALTITUDE一致;
自动模式
-
HOLD:保持模式保持在当前位置和姿态(依赖GPS)。参数:MIS_LTRMIN_ALT:悬停最小高度(如果悬停高度低,飞行器会升高)。
-
RTL:返航模式返回HOME位置等待或降落(依赖GPS)。飞行器会首先上升到RTL_RETURN_ALT高度(默认60m,如果实际飞行高于此高度则保持),然后直线飞行HOME位置;到达HOME后,会快速降低到RTL_DESCEND_ALT高度(缓降或停止高度,默认30m),会悬停RTL_LAND_DELAY时间后降落(默认0s,设置为-1表示永远悬停);参数:RTL_MIN_DIST:触发上升的最小距离,如果水平位置离HOME很近,飞行器将直接降落到HOME而非升高到返回高度。
-
TAKE OFF:起飞模式起飞并等待下一步指令(依赖GPS)。该模式为自动模式,遥控器失效(除非切换模式),启动前必须先解锁;飞行器上升到MIS_TAKEOFF_ALT高度(默认2.5m)后等待,上升速度为MPC_TKO_SPEED(默认1.5m/s)。
-
LAND:降落模式在当前位置降落。该模式为自动模式(遥控器失效);飞行器在切换到该模式位置降落,下降速度为MPC_LAND_SPEED直至地面
-
MISSION:任务模式飞行器接受地面站的程序控制指令,如果未收到任务,在当前位置悬停(依赖GPS)。该模式为自动模式,遥控器失效,该模式工作前需解锁;任务通常在QGC创建,也可以通过开发者API,上传到飞控。如果任务已存储并且PX4在飞行,将从立即执行任务;如果任务已存储但PX4着陆,PX4将执行任务,如果任务没有TAKEOFF命令,PX4将在执行剩下任务前飞行至最小高度;如果任务未存储或PX4执行完所有任务命令,飞行状态飞行器会悬停,着陆状态飞行器会等待;可以在QGC手动修改当前任务;当飞行器锁定或新任务上传后,任务会重置;任务可以通过HOLD模式暂停,重新激活后会从继续执行当前任务;
飞行模式设置[ ](#id6
-
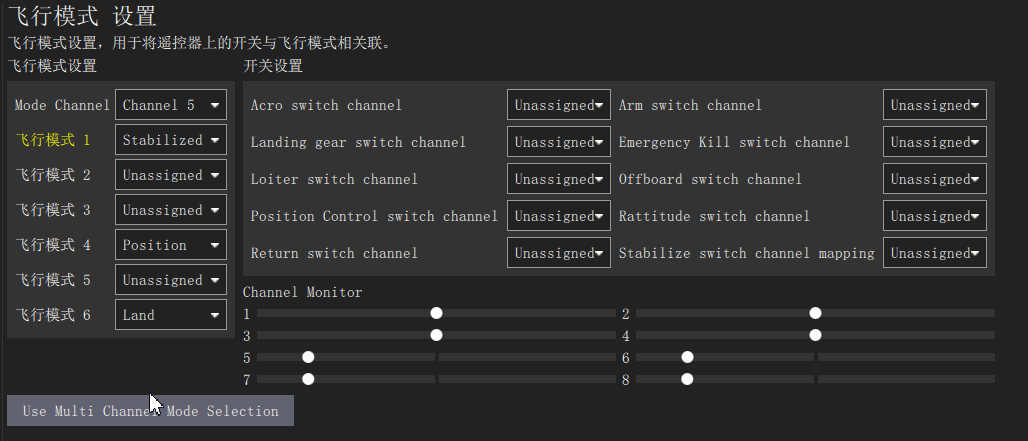
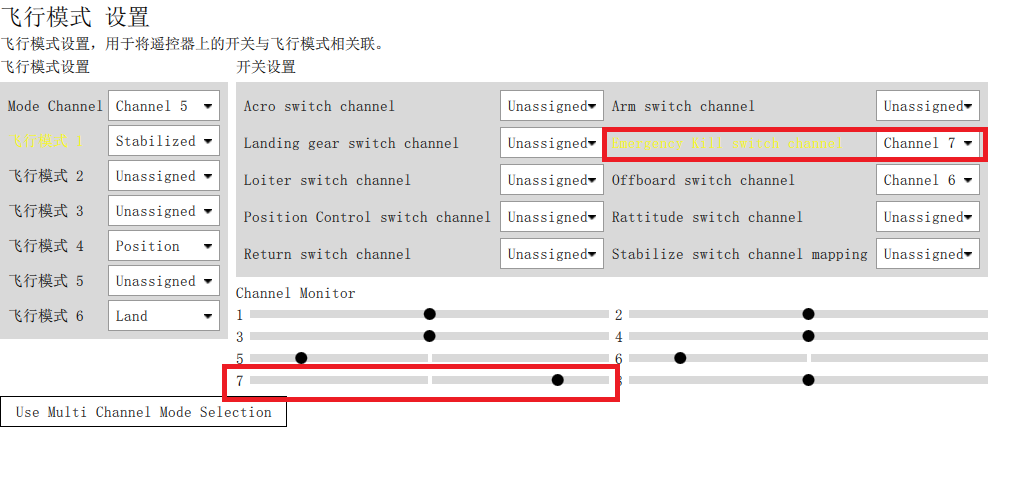
可以在遥控器上设置通道,一般三挡开关对应飞行模式1、飞行模式4、飞行模式6。如图所示,此时通道5设置的三个模式分别为自稳模式、定点模式、降落模式。
-
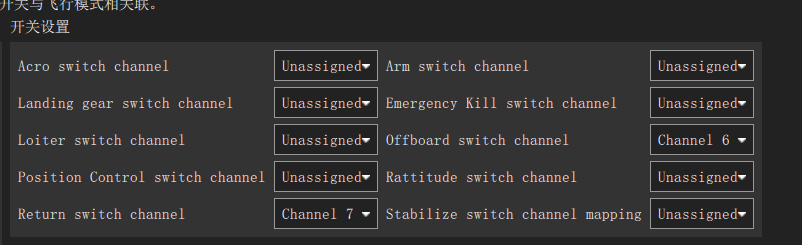
如有需要板载计算机模式和返航模式,也可在开关设置下自行设置。如图所示,设置通道6为offboard模式,通道7为返航模式。
注意!
遥控器设置通道时,无人机须处于断电状态。 -
演示视频
遥控器紧急开关设置
遥控器设置
-
打开FS-I6S遥控器,进入功能设置页面。

-
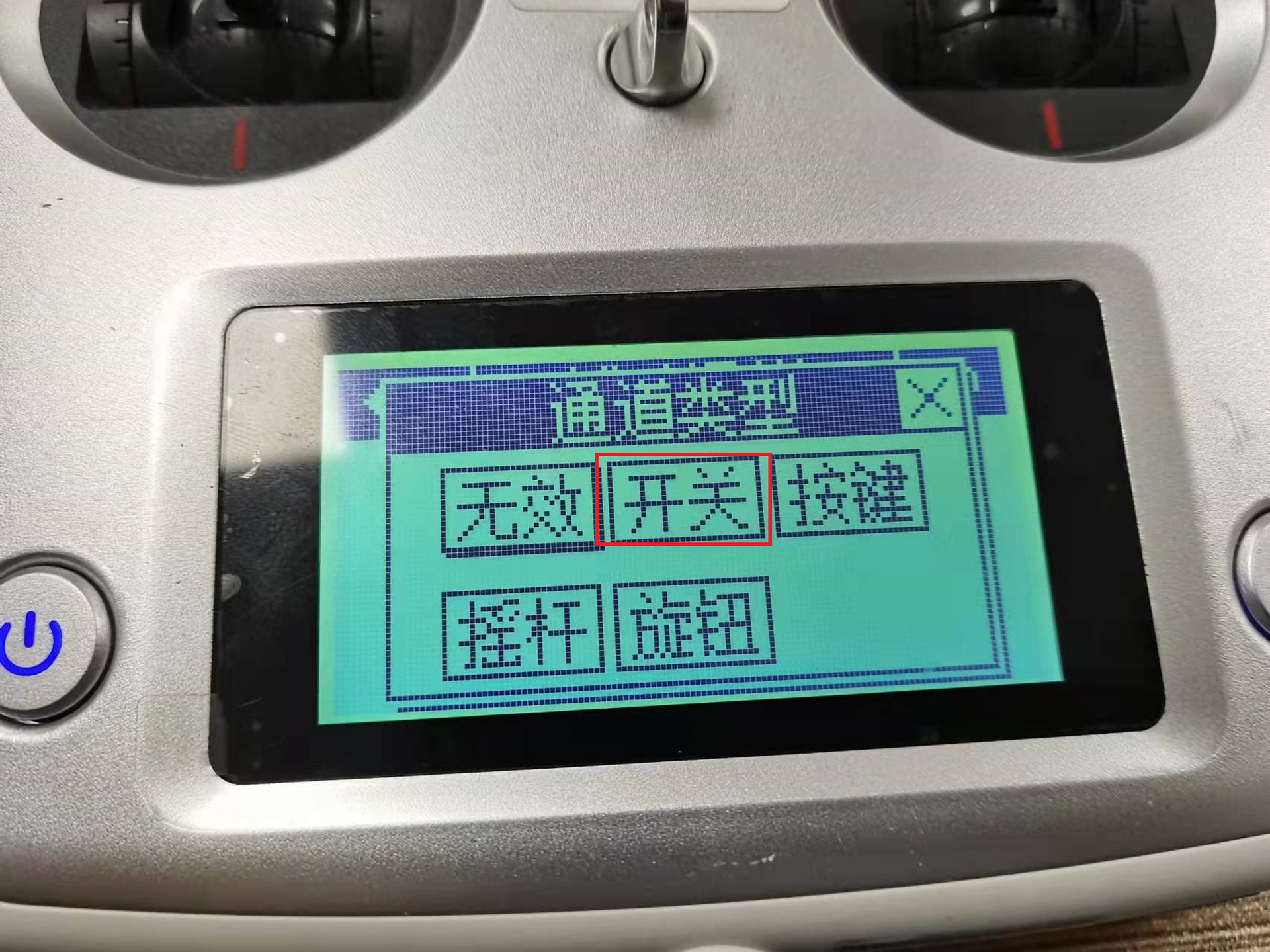
点击进入辅助通道设置。

-
将7通道开启,并设置为开关SWA,SWA对应的是左上角的两段开关。


QGC地面站软件映射
-
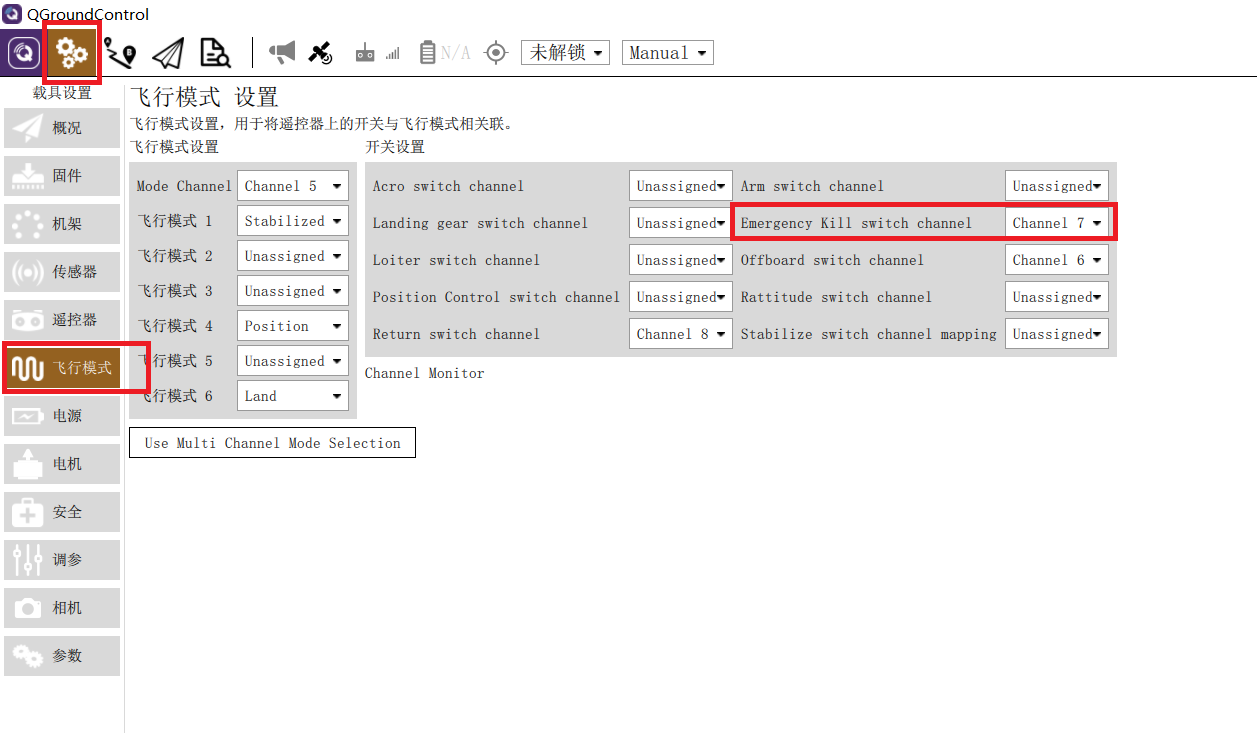
连接上QGC,进入设置界面的飞行模式设置将Emergency Kill switch channel映射为7通道。
-
拨动遥控器的SWA开关,会有7通道的响应。
急停操作演示及注意事项
-
急停开关是在飞机飞行过程中,进行紧急使用的,在急停开关启用的5s时间内,如果复位急停开关,那么电机又重新恢复旋转,所以在使用急停开关过程中建议至少超过5s时间再去复位急停开关。


急停开关启用之后,会qgc提示急停开关已启用,在5s以内,飞机目前仍处于解锁状态,只不过急停开关让电机停止旋转,等待五秒之后,飞机进入未解锁状态。
-
演示视频