进阶功能-室内自主避障
-
本节主要讲解P450系列无人机在室内的自主避障演示。视频紧接上节内容 首次飞行 ,默认已经通过WiFi数传连接到QGC地面站和nomachine远程连接到板载计算机,主要分为一下几点进行讲解:启动指令,起飞,降落,以及最后的视频演示。
注意!
1.受限于开源飞控硬件性能,飞机在长时间不用后会出现位姿漂移,要求每次飞行前电池重新上电以重启飞控和板载计算机,并严格按照wiki规范操作,避免炸机风险。 2.vins视觉定位对测试环境(光照条件、视觉特征点等)依赖较大,非vins专业人士 建议测试场地做如下部署:地面采用颜色交错的地板、且四周墙面尽量张贴二维码A4纸(发货时赠送的二维码A4纸,最忌四面白墙),以此增加飞机视觉定位的稳定性、保障试验效果的理想,相反在视觉特征点不明显的环境下定位数据容易发散、炸机风险增高。
启动指令
-
请按照以下步骤操作
注意!
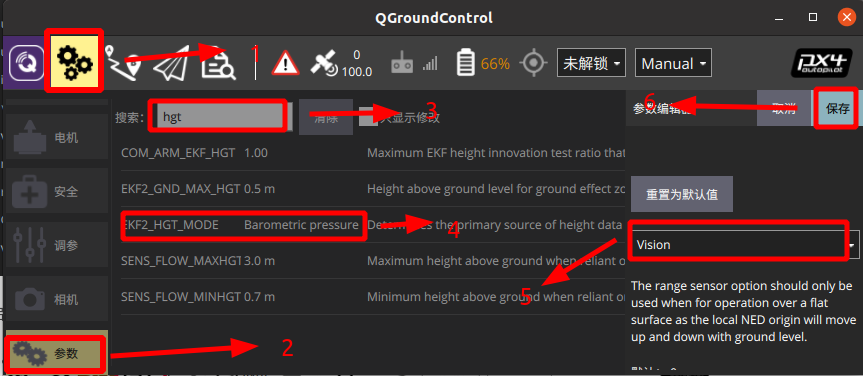
在室内操作时,注意在QGC地面中查看自己的位置源是否更改,参数EKF2_AID_MASK设定如下图,EKF2_HGT_MODE设定为Vision。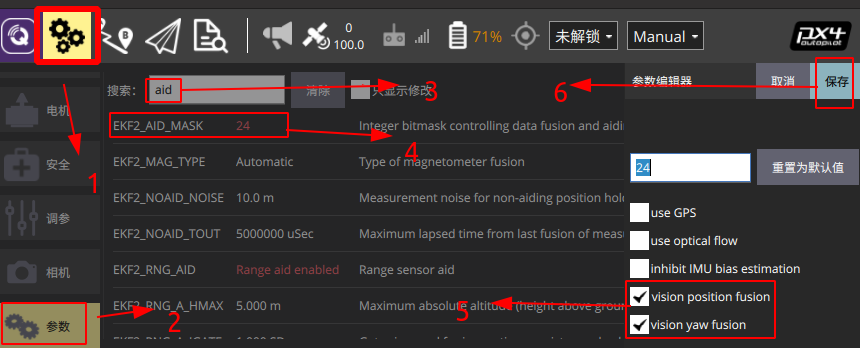
-
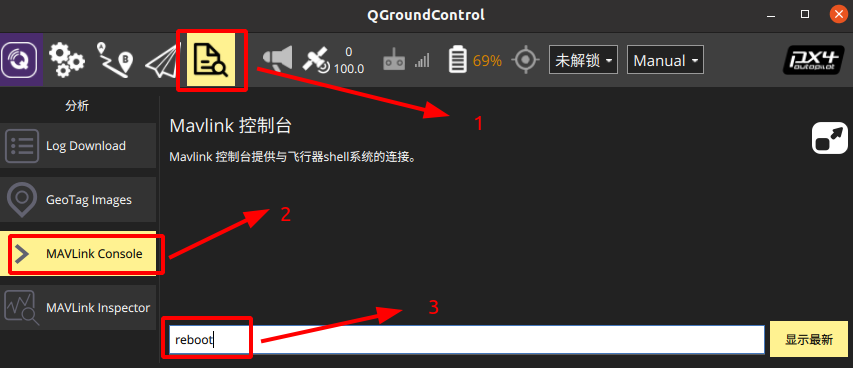
输入启动脚本前,先在QGC重启飞控,如下图所示:
-
选择MAVLink Console,进入MAVLink控制终端,输入reboot,回车,听到飞控重启的提示音,即重启飞控成功。
-
启动第一个指令,通过Nomachine访问板载终端,输入如下命令
roslaunch p450_experiment astar_onboard.launch
-
打开一个新终端,再启动第二个指令
roslaunch p450_experiment astar_ground.launch
起飞
-
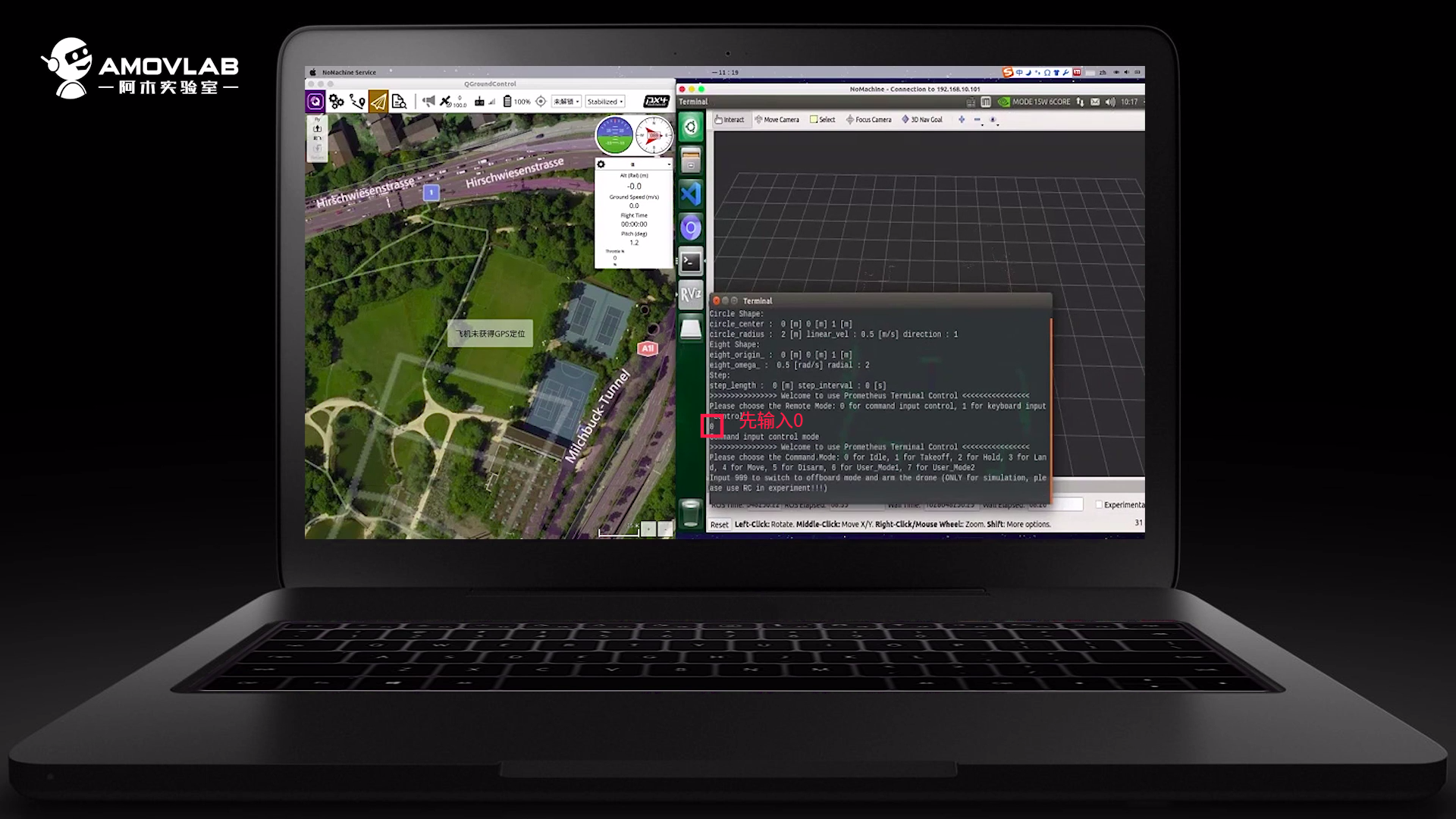
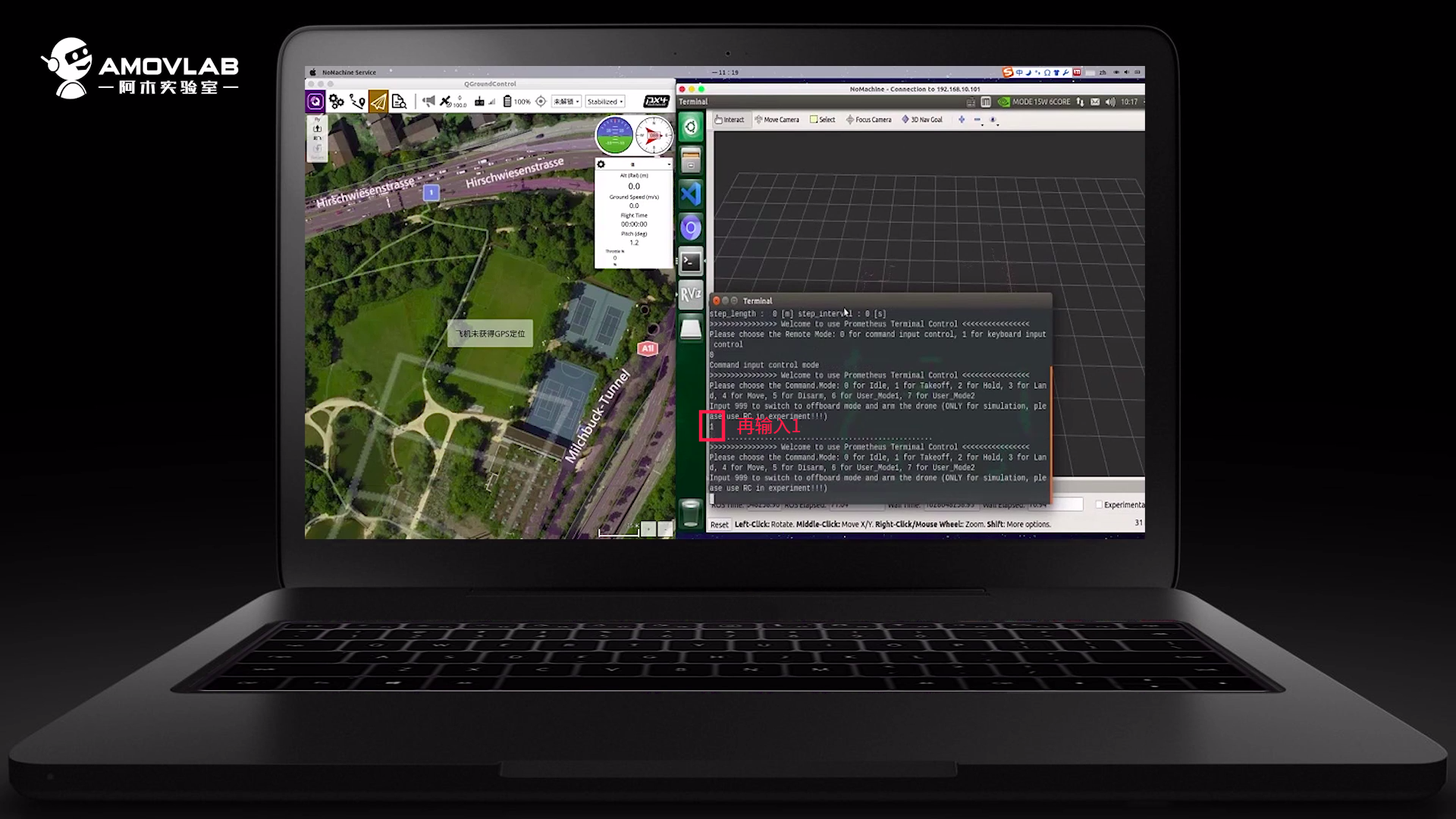
先输入起飞指令
在此终端先输入0选择命令输入控制
-
再输入1选择take off起飞指令,由于没有切入offboard模式,此时无人机还不会响应。
-
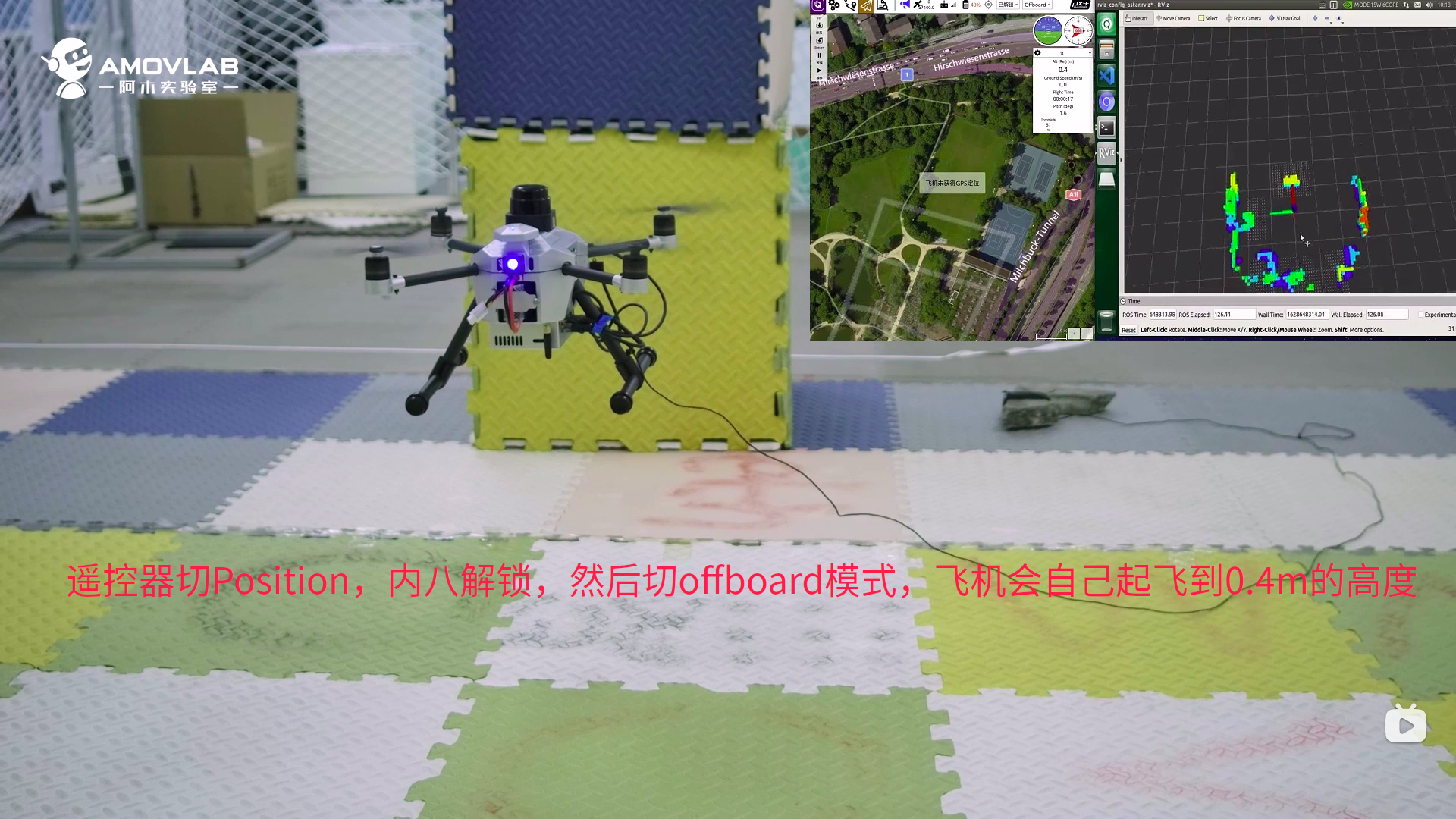
我们遥控器切定点,解锁,切offboard,这时无人机才会自动起飞。
-
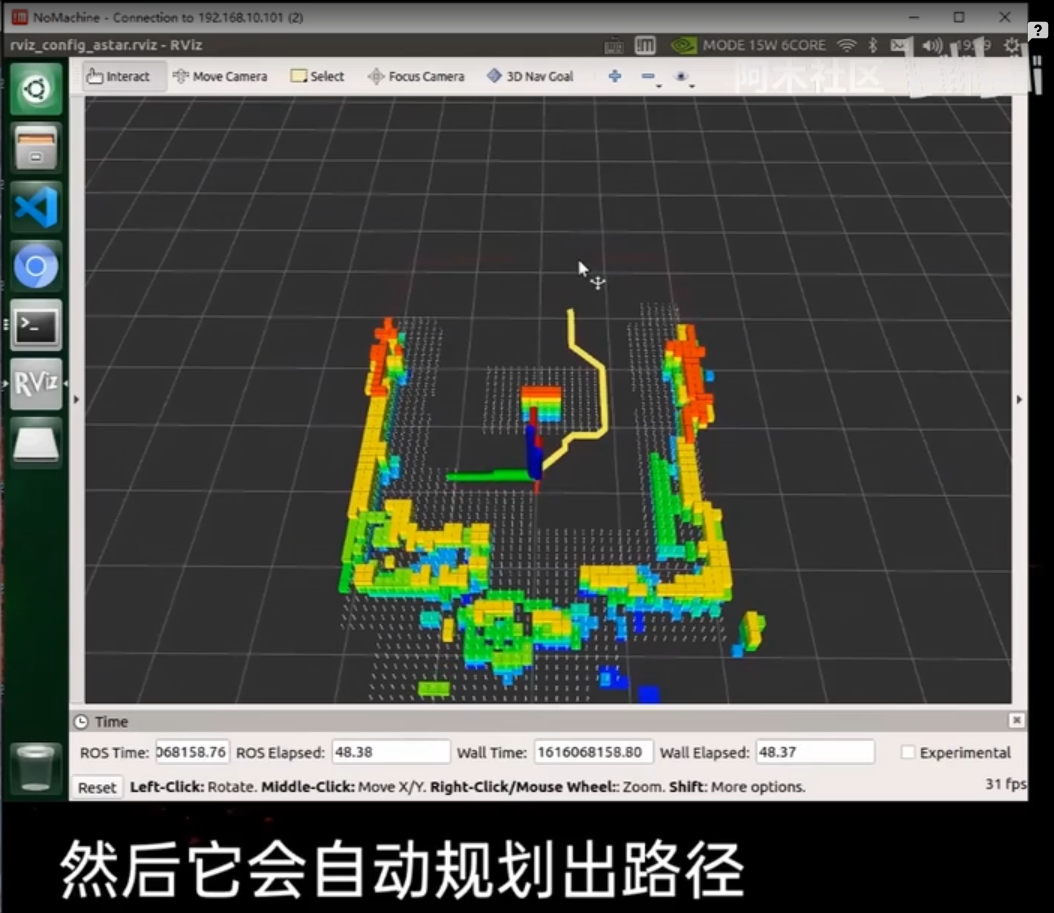
等到无人机起飞到一个稳定高度,也即是我们设定的起飞高度后,回到rviz界面,点击选择3D Nav Goal
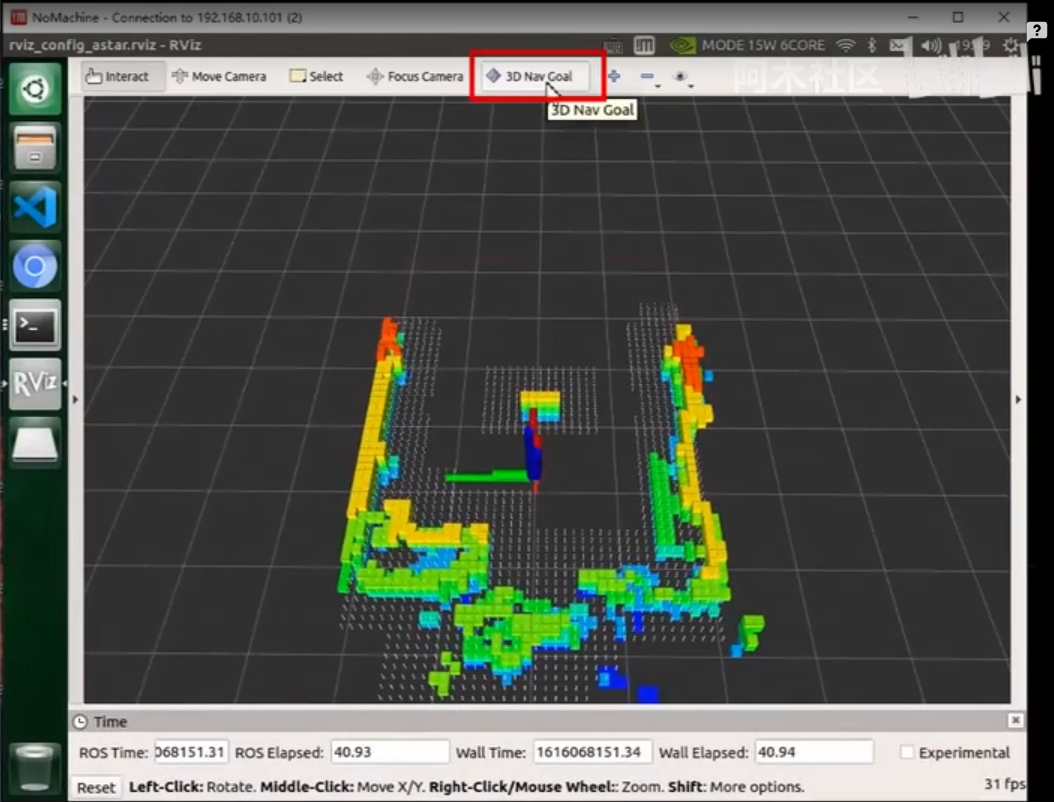
-
在rviz上点击一个点作为目标点
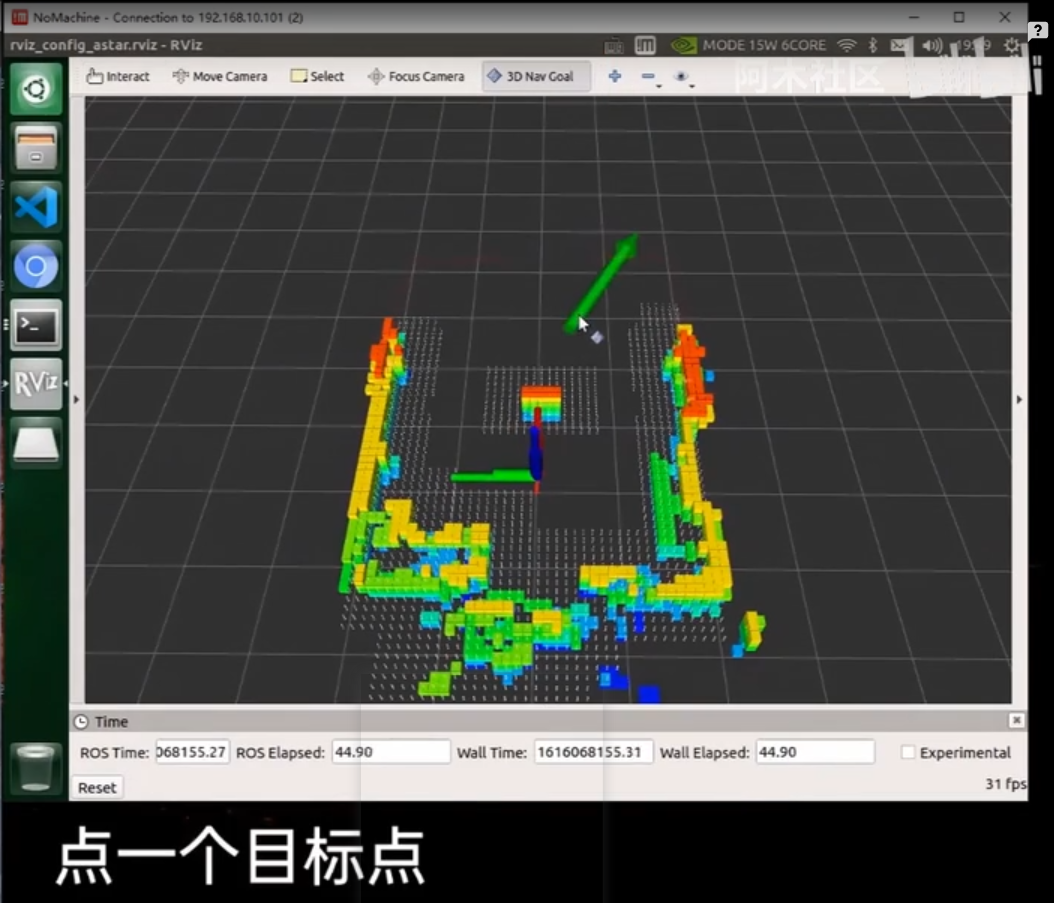
-
会自动生成一个绕开障碍物的路径
-
此时无人机会沿着这个生成的路径飞,绕开障碍物,且高度会保持不变。
注意!
如果中途无人机飞行不符合预期,及时通过遥控器切出offboard模式,转为position模式手动控制。
降落
-
无人机飞到目标点后,可以遥控器拨动offboard飞行模式开关切出offboard模式,并缓慢手动降落。

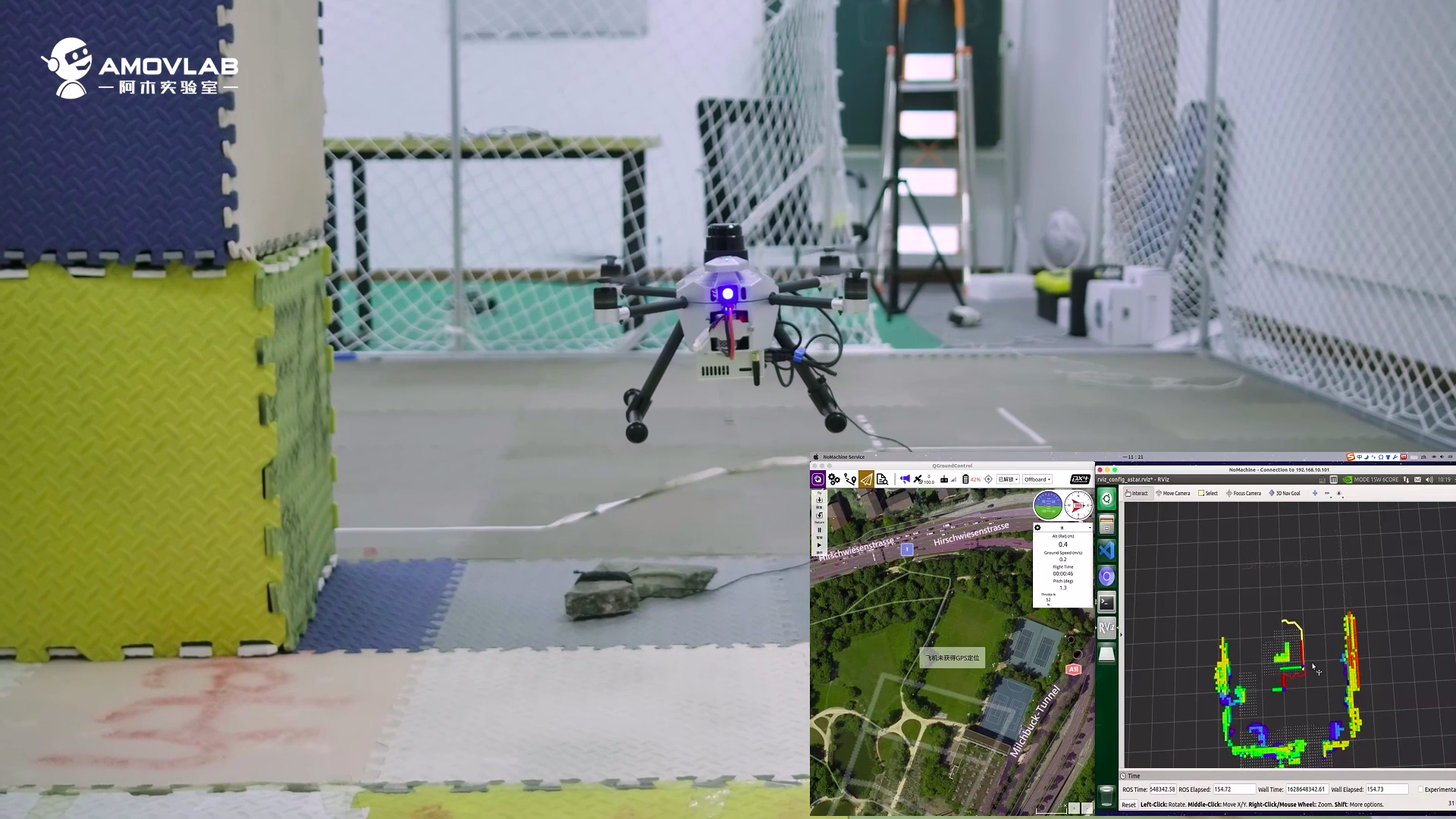
视频演示
-
v1版本功能演示
-
v2版本功能演示