进阶功能-室外自主避障
-
本节主要讲解P450系列无人机在室外的自主避障演示。视频紧接上节内容 首次飞行 ,默认已经通过WiFi数传连接到QGC地面站和nomachine远程连接到板载计算机,主要分为一下几点进行讲解:启动指令,起飞,降落,以及最后的视频演示。
注意!
受限于开源飞控硬件性能,飞机在长时间不用后会出现位姿漂移,要求每次飞行前电池重新上电以重启飞控和板载计算机,并严格按照wiki规范操作,避免炸机风险。无人机机头需朝正东方向摆放。
启动指令
-
请按照以下步骤操作
注意!
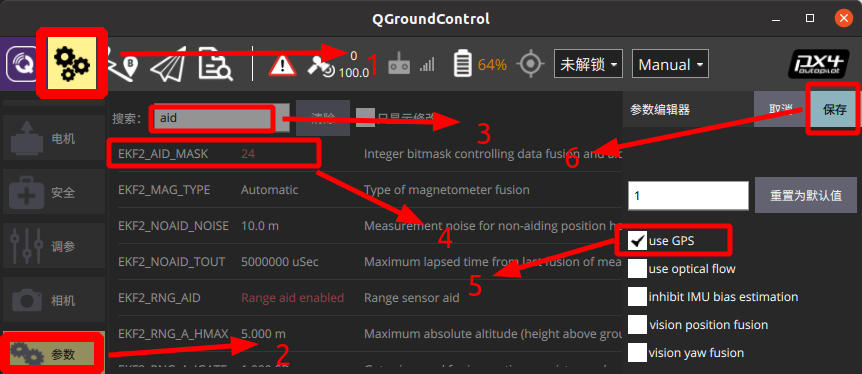
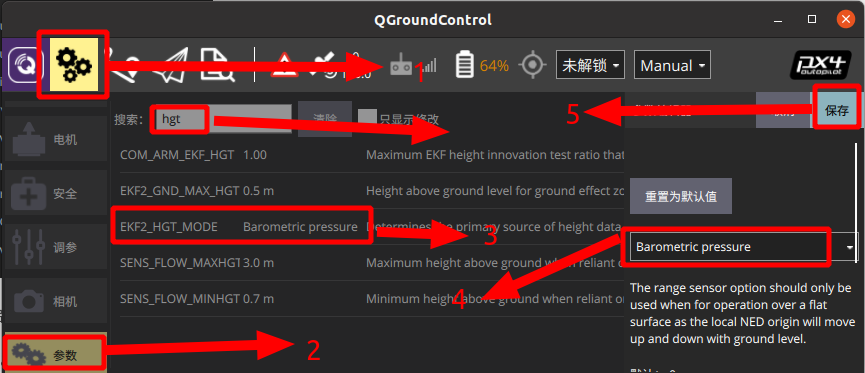
在室外操作时,注意在QGC地面中查看自己的位置源是否更改,参数EKF2_AID_MASK设定为use gps,EKF2_HGT_MODE设定为Barometric pressure。
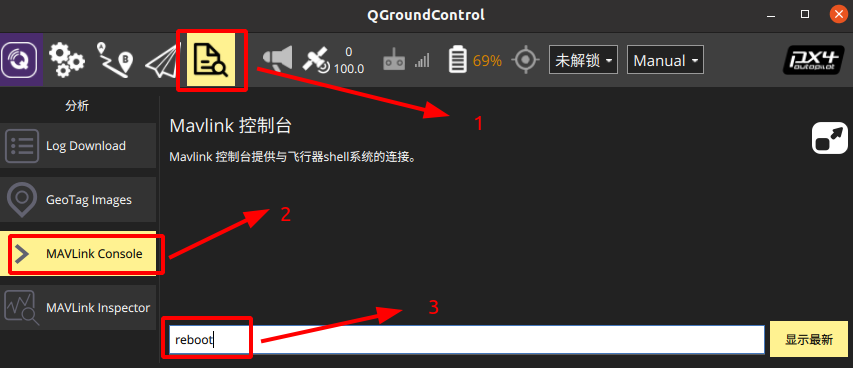
- 在启动脚本前,我们需要在QGC中先将飞控重启一下,操作如下,
- 选择MAVLink Console,进入MAVLink控制终端,输入reboot,回车,听到飞控重启的提示音,即重启飞控成功。
-
启动第一个指令
roslaunch p450_experiment astar_onboard_gps.launch
-
再启动第二个指令
roslaunch p450_experiment astar_ground_gps.launch
起飞
-
先输入起飞指令
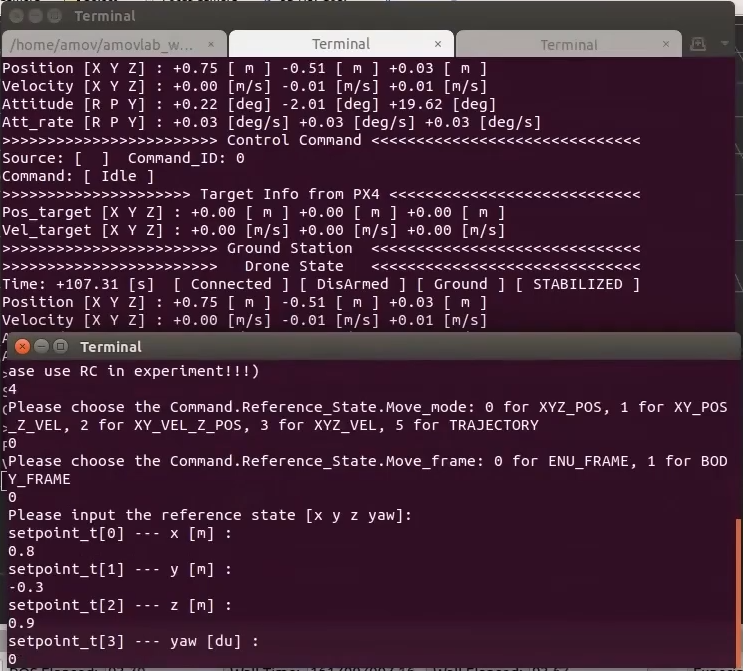
在此终端先输入0选择命令输入控制
根据终端提示,再依次输入4 move 、 0 XYZ_POS 、0 ENU_FRAME 、 x的坐标(需要和无人机当前本地x坐标一致,差不多即可) 、y的坐标(需要和无人机当前本地y坐标一致,差不多即可) 、 z的坐标为0.9,这个不需要根据当前无人机本地位置坐标来写
-
输完以上指令后,遥控器切定点解锁然后切offboard,无人机会自动起飞,等到无人机起飞到一个稳定高度,也即是我们设定的起飞高度后,回到rviz界面,点击选择3D Nav Goal
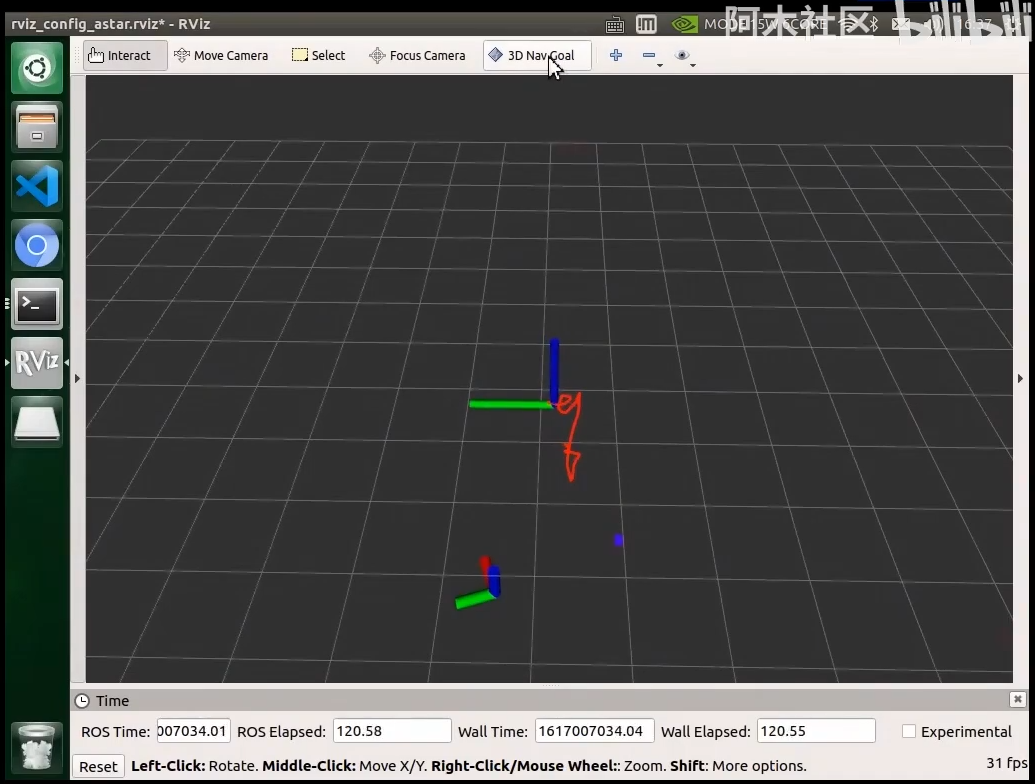
-
在rviz上点击一个点作为目标点,会自动生成一个绕开障碍物的路径
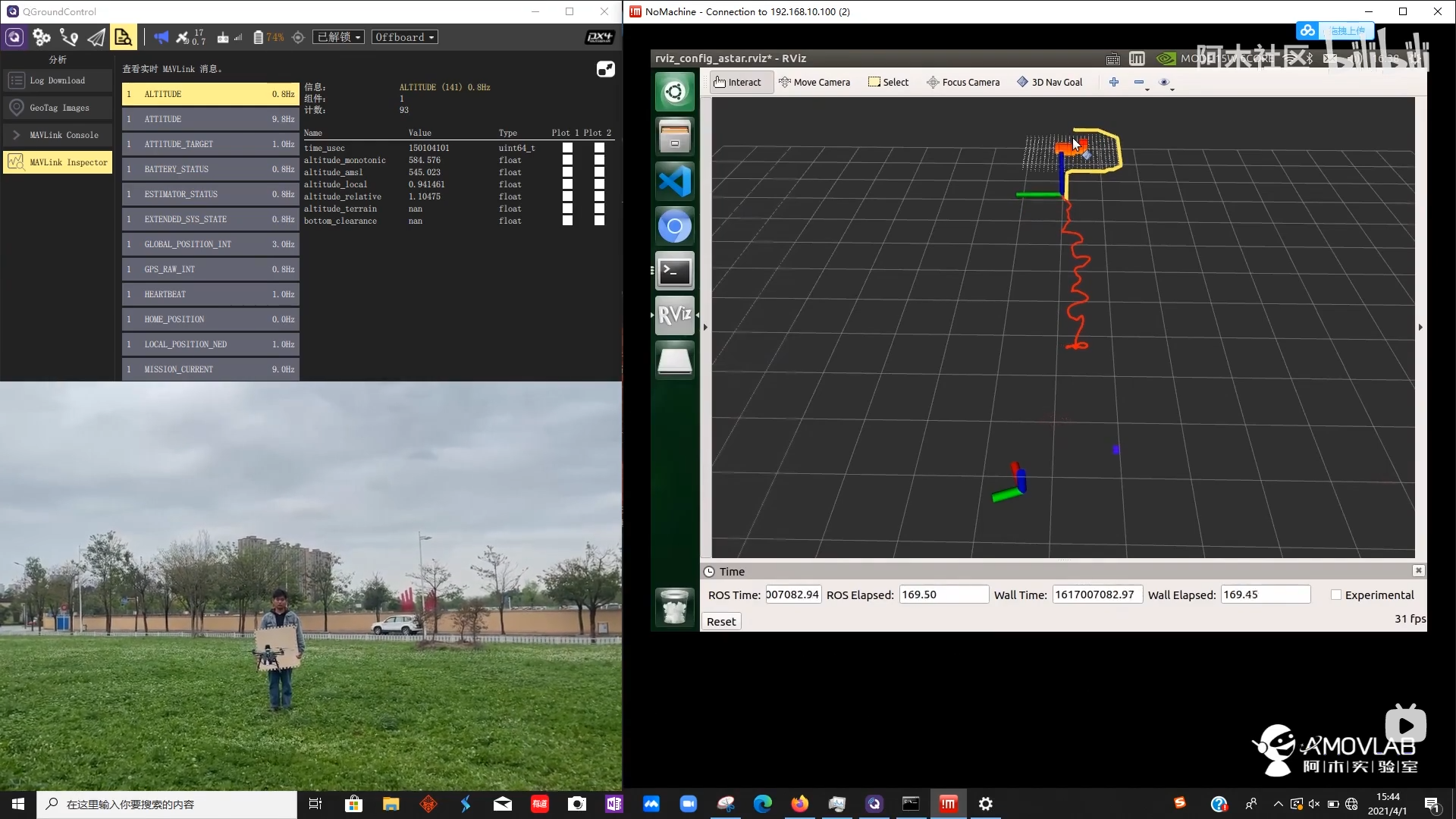
-
此时无人机会沿着这个生成的路径飞,绕开障碍物,且高度会保持不变。
注意!
如果中途无人机飞行不符合预期,及时通过遥控器切出offboard模式,转为position模式手动控制。
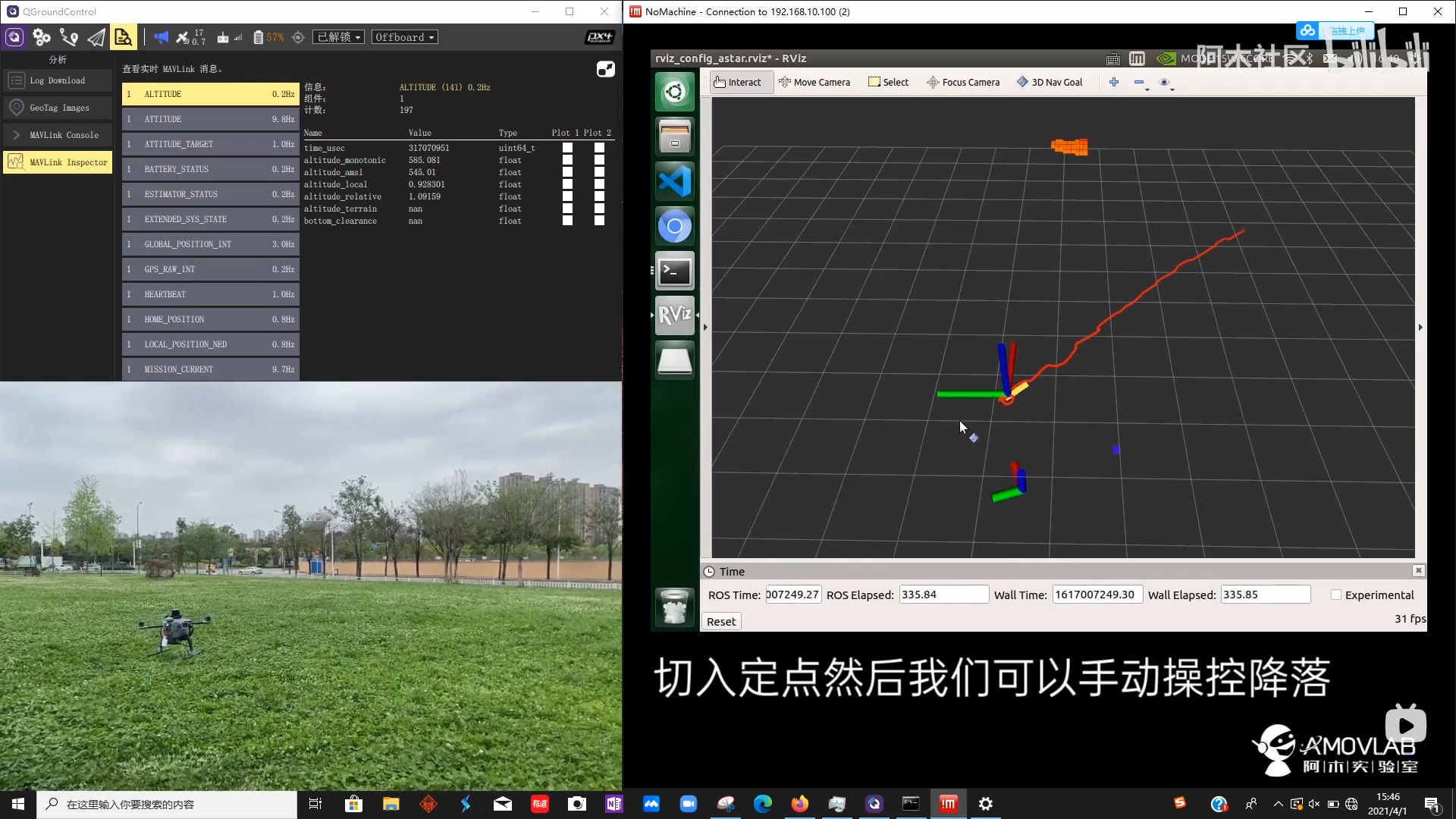
降落
-
无人机飞到目标点后,可以遥控器拨动offboard飞行模式开关切出offboard模式,并缓慢手动降落。
视频演示
-
室外自主避障演示视频如下