PX4基础功能及配置
1. PX4基本介绍
- 简介:PX4是一款自动驾驶软件,可以驱动无人机或者无人车。它可以被烧写在某些硬件内,并与地面控制站一起组成一个完全独立的自动驾驶系统。
2. 连接飞控
-
p230不同于其他p系列无人机,由于自身不携带wifi数传,所以我们需要通过UDP的方式连接QGC。 首先需要一个局域网,可以用路由器,主机和板载计算机需要都连接上局域网
-
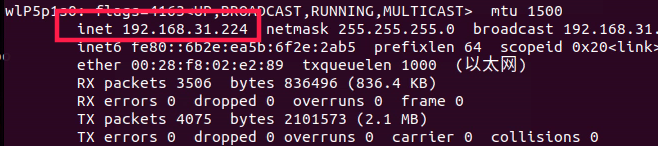
查看板载计算机ip
我们需要一个局域网,P230和我们的笔记本需要在同一个局域网内。

-
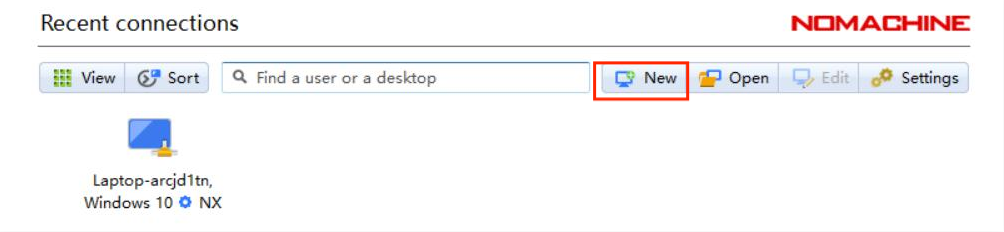
nomachine远程连接板载计算机
点击New
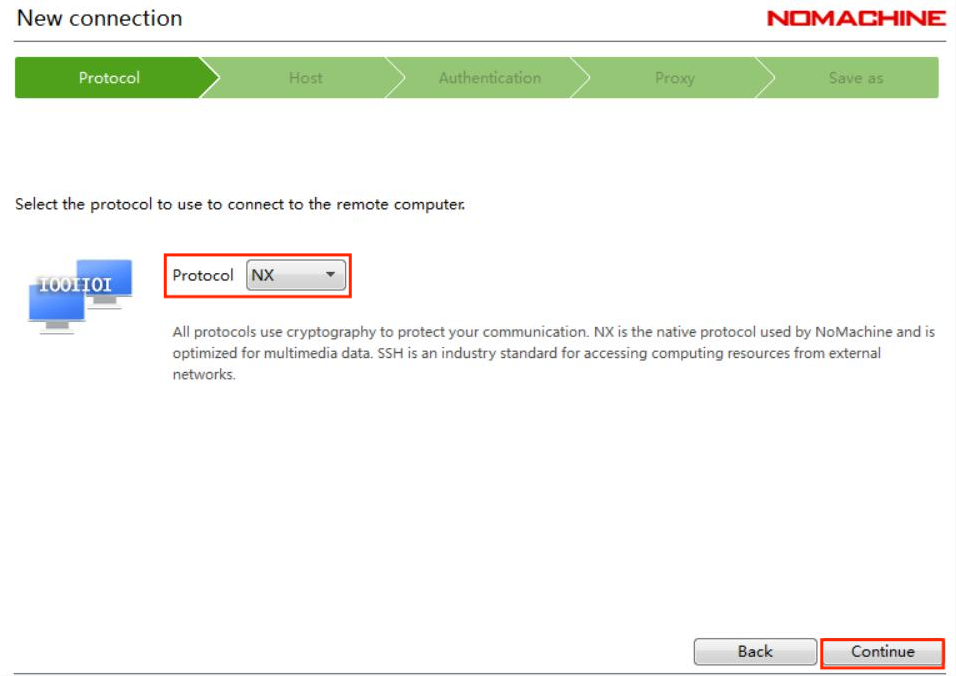
在Protocol下选择NX,点击Continue。
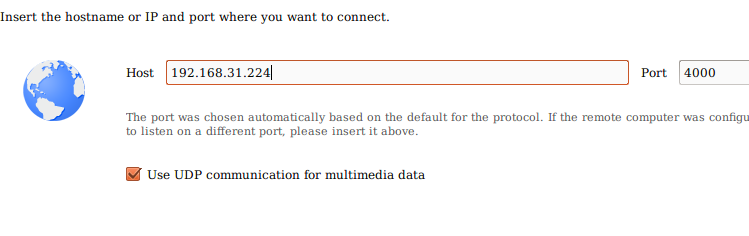
在“Host”下填写板载计算机的ip地址,板载计算机地址参考步骤2,“Port”下默认4000。
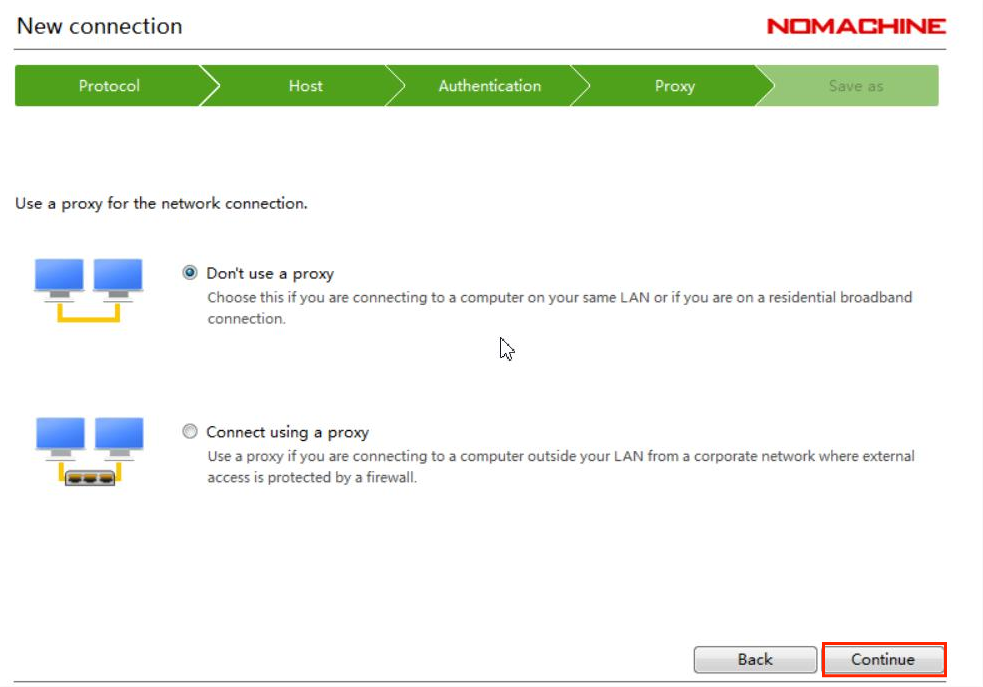
在Proxy下默认是“Don’t use a proxy”,点击“Continue”。
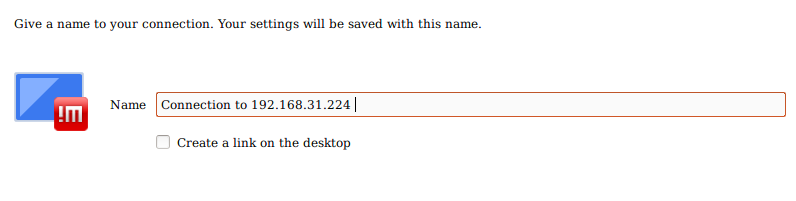
在Save as下会生成默认的name,可以不做更改,点击“Done”。
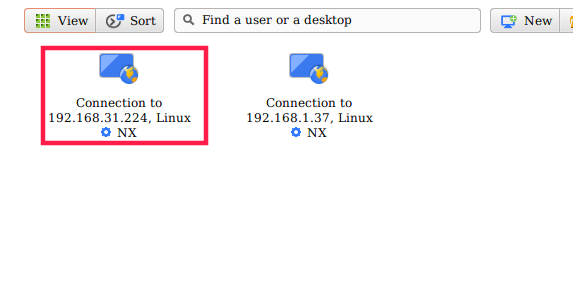
按照上述步骤操作,会自动生成如下图所示用红框标起的链接,点击“Connect”。
在“Username”和“Password”下输入“amov”
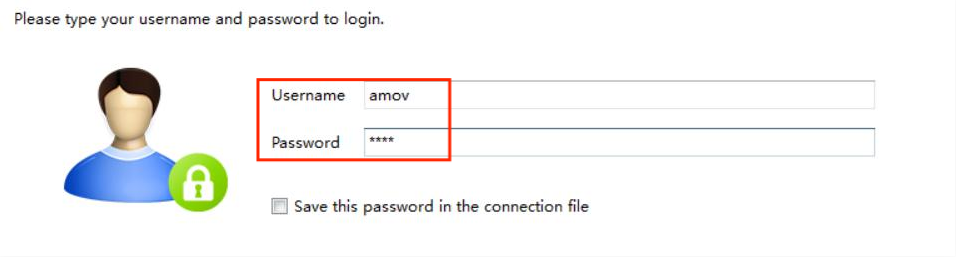
Nomachine成功连接板载计算机后会显示如下界面

-
QGC远程连接到飞机
不同于P450的wifi数传,P230并不携带数传,我们需要通过UDP的方式连接到地面站。这里的IP地址是自己主机的IP地址,并且需要在一个区域网内。
然后修改p230_vio_onboard.launch文件中的内容:

在终端执行roslaunch p230_experimentp230_vio_onboard.launch,就可以连接到地面站。
roslaunch p230_experimentp230_vio_onboard.launch
3. 固件编写
-
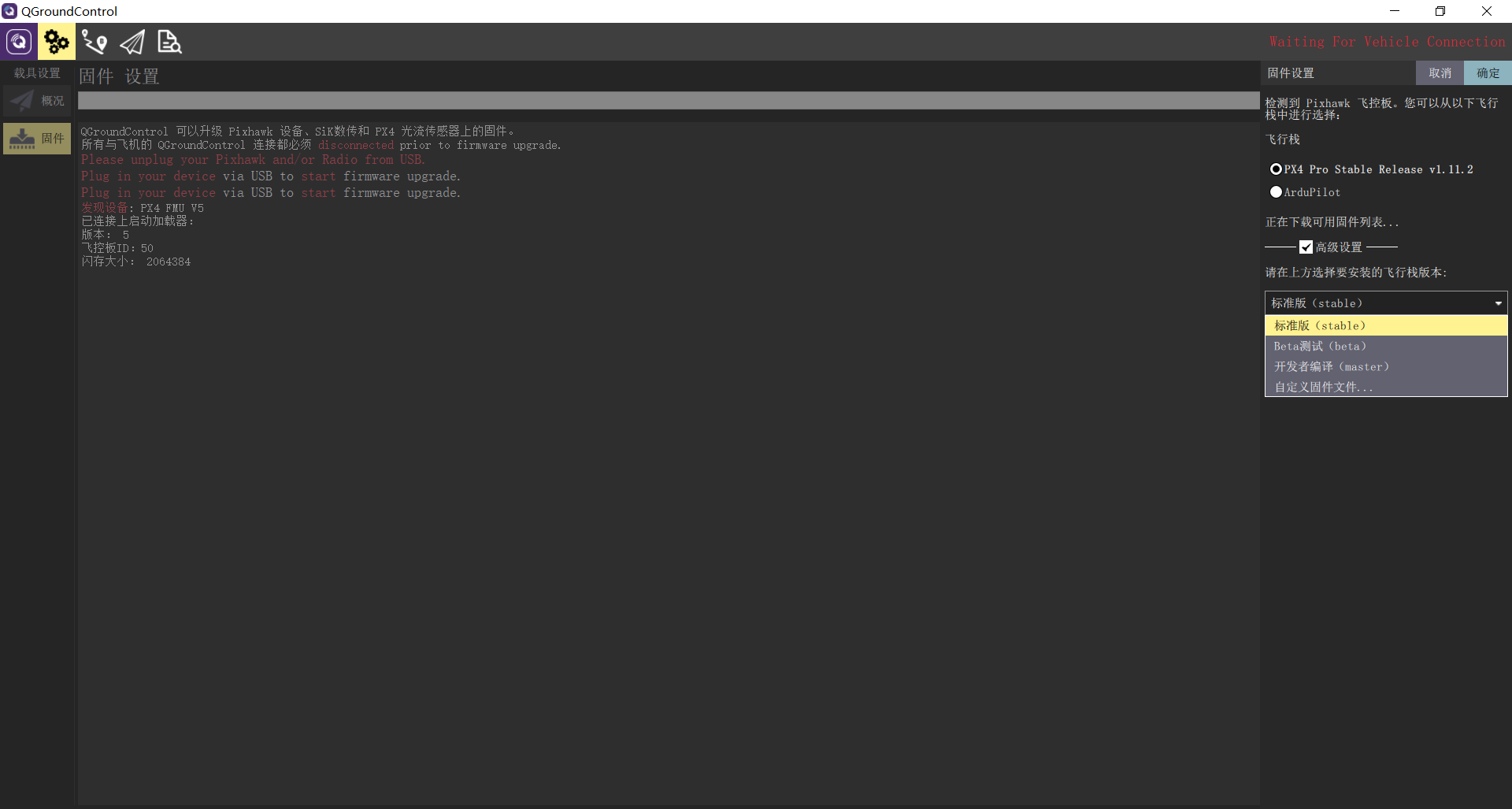
选择烧写固件
操作界面选择在三个齿轮下,在“固件”界面下,用usb线连接电脑与飞控。会弹出如图所示的界面,右方点击“高级设置”,选择标准版。点击确定。如果有自己的固件,可以选择“自定义固件”,找到自己的固件相应路径,点击确定即可烧写。
-
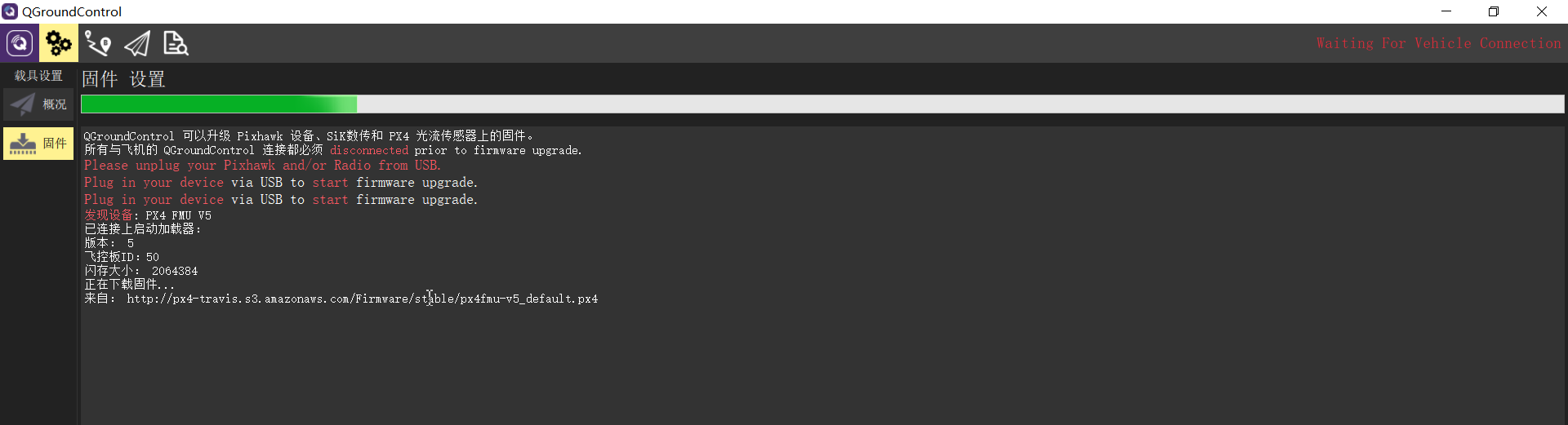
烧写过程
固件正在刷写中,最后一行显示为固件的版本。
-
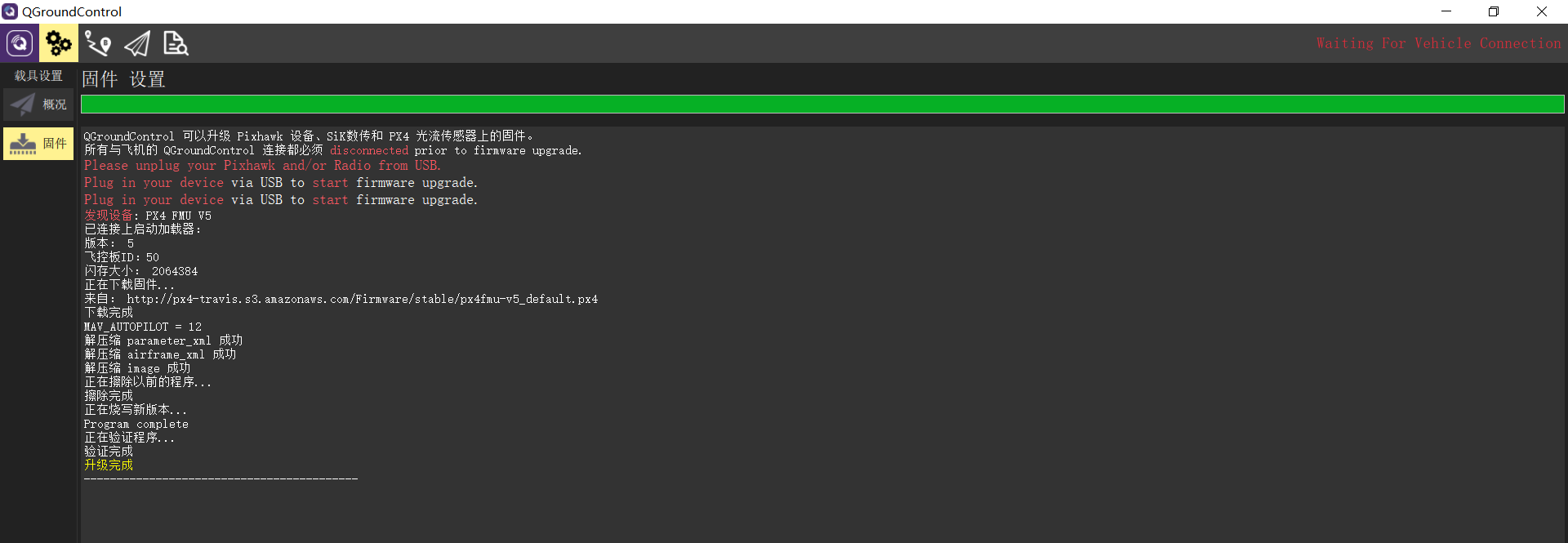
烧写完成
固件烧写成功后入下图所示,会有升级完成的提示
4. 传感器自检和校准
-
磁力计校准
按照地面站界面所显示的相应摆放飞机的姿态,然后在水平面内朝一个方向旋转,直至下一个方向。
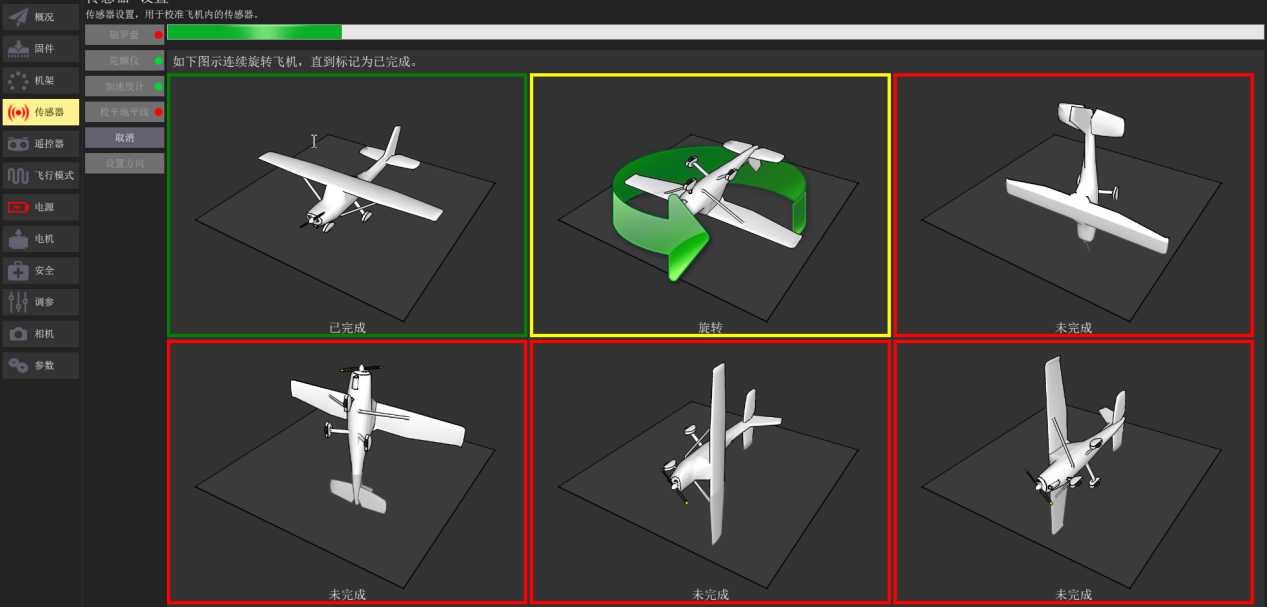
校准完成后如下图所示
-
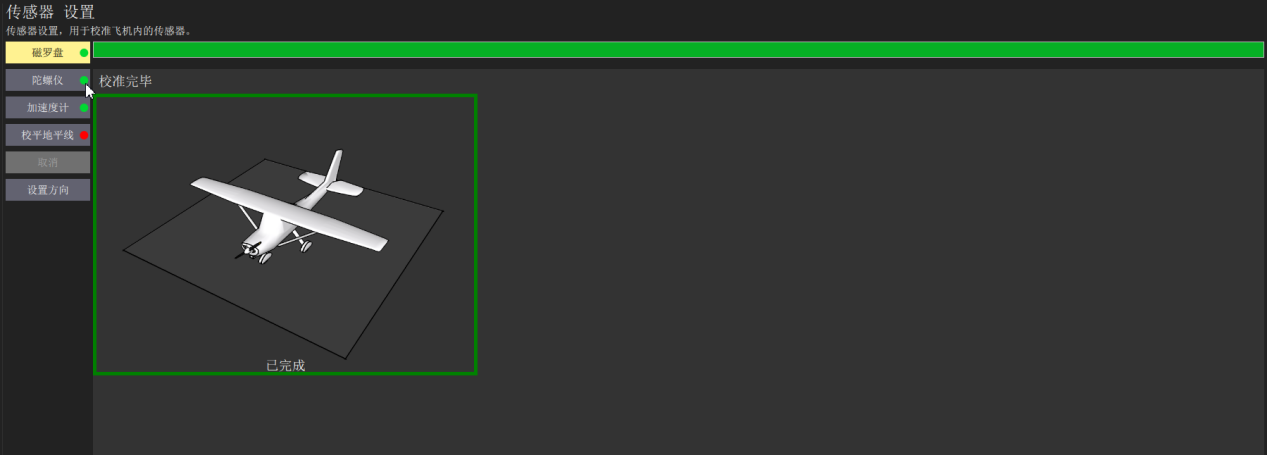
陀螺仪校准
陀螺仪校准只需要把飞机平放即可,校准完成后会边框会显示为绿色。
-
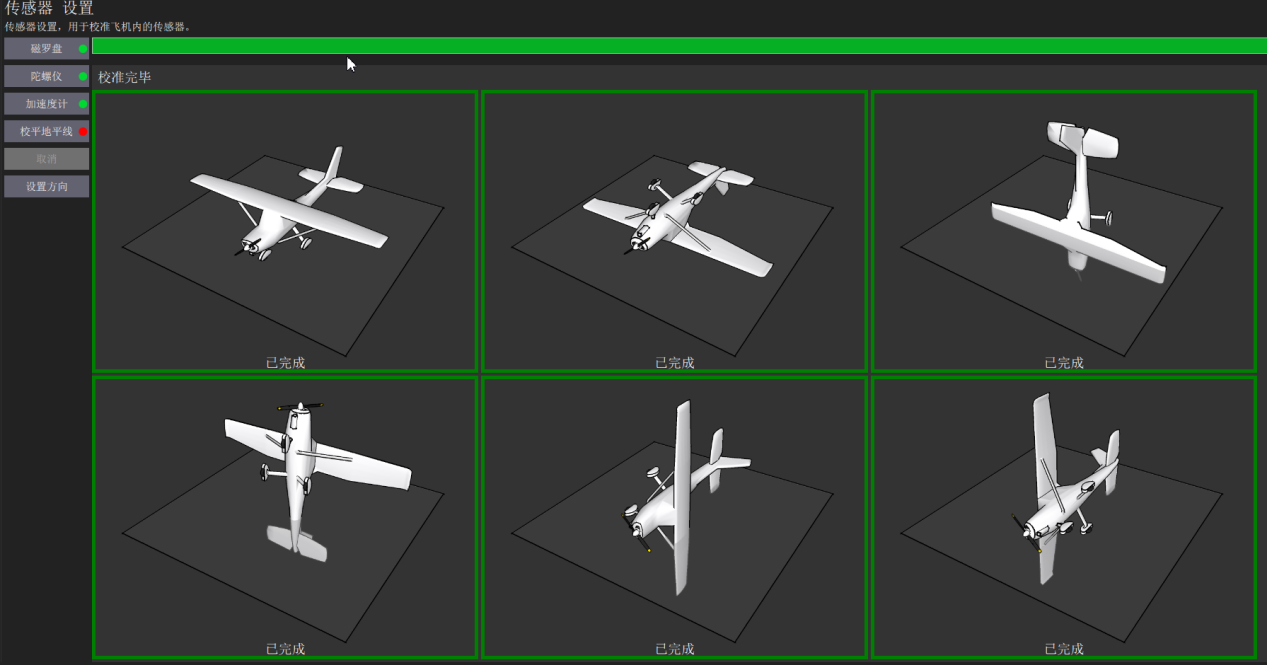
加速度计校准
加速度计校准为6面校准,只需要将飞机按照6个面分别摆放即可,没校准的边框为红色,正在校准中边框为黄色,校准完成边框为绿色。

-
水平面校准
水平面校准只需要将飞机放平即可,校准完成后会有“calibration done”的字样,意为校准完成。

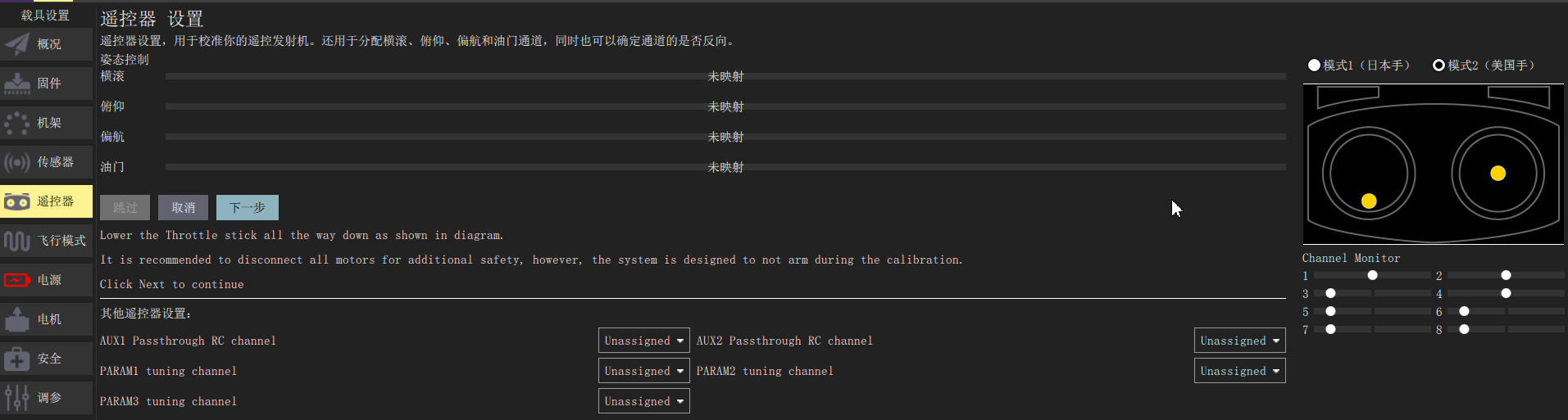
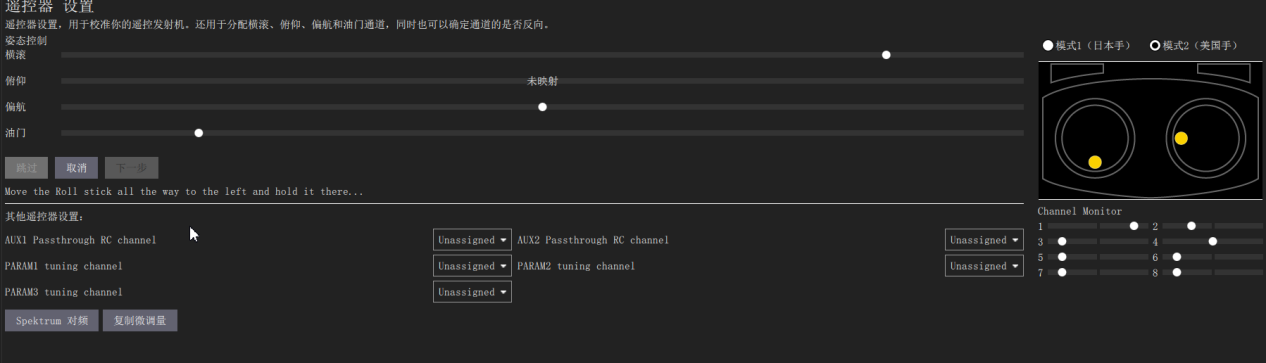
5. 遥控器连接与校准
-
点击校准,然后将油门拨到最低,如下图所示
-
然后按照界面右方的操作指示拨动摇杆
-
当全部操作校准完成后,会显示如下界面,此时将油门拨到最低,然后点击下一步。

-
当连续点击两次下一步后,会有如下界面,就表示此时校准已经完成。

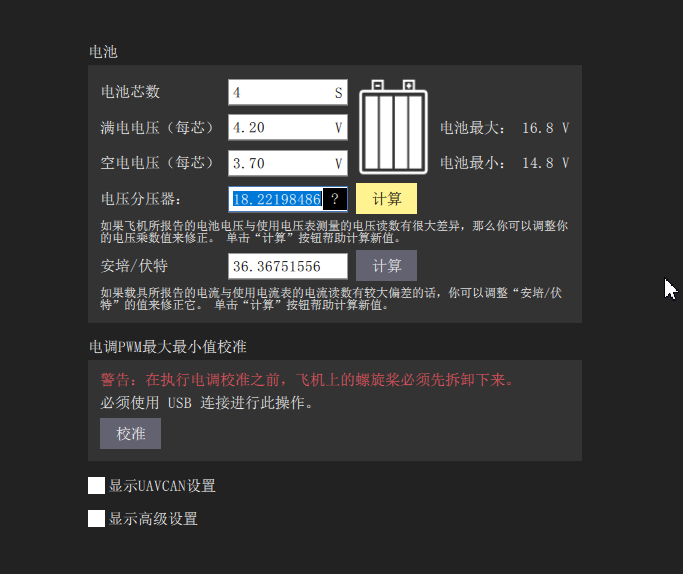
6. 电池校准
-
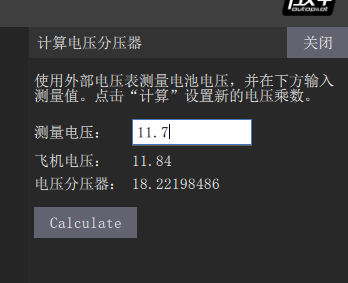
用BB响(低压报警器)测出飞机实际电压,如下图所示

-
在电源界面下,选择“电压分压器”,点击计算
-
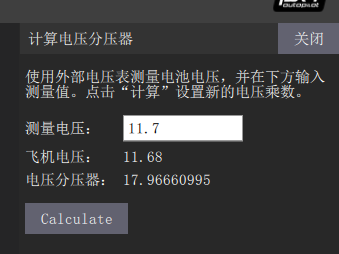
如图所示,在测量电压下输入已经测得的实际电压,然后点击“Calculate”
-
等到“测量电压”与“飞机电压”数字接近时,表面电压校准已经完成,此时点击关闭即可。
7. 电调校准
-
在电源设置界面下,点击如箭头所指的“校准”。
注意!
校准前不允许给飞机上电,把桨叶拆卸下来
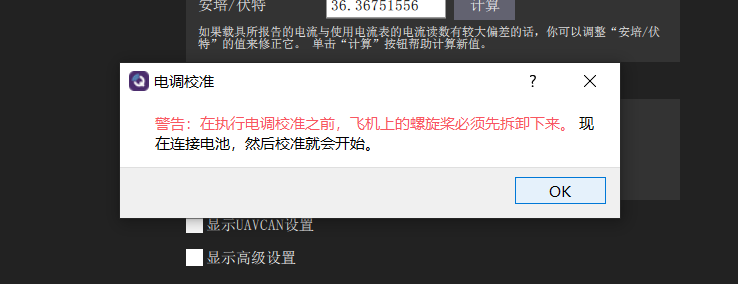
注意!
校准前不允许给飞机上电,把桨叶拆卸下来。 -
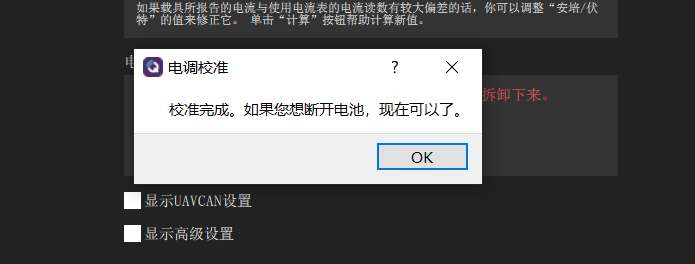
给飞机上电,飞机会自动进行电调校准,几秒钟后就会校准完成了。
8. 常用参数设置
-
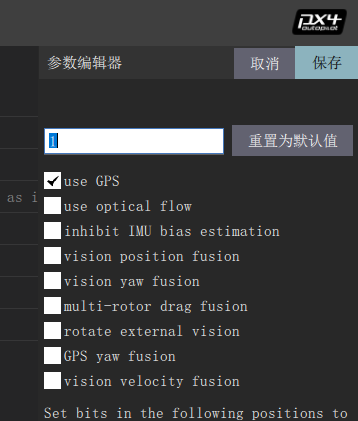
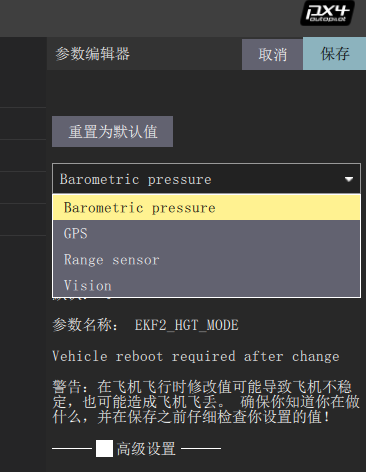
在参数设置下面的搜索界面,搜索关键字即可调整参数。

-
常用参数:
aid_mask:位置估计来源选择
hgt_mode:高度估计来源选择
Mag_sides:传感器校准面数选择
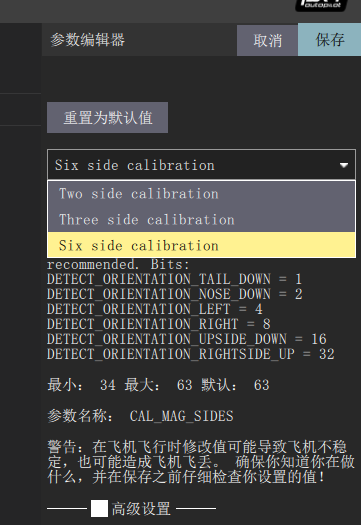
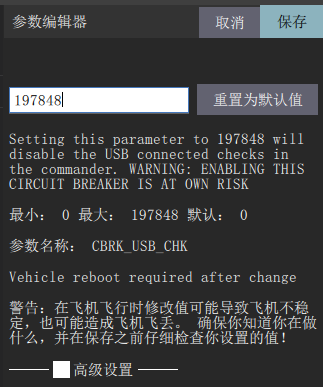
Usb_chk:当用数据线调试飞机时,有时会显示“usb is not safe”,此时搜索“usb_chk”把数值调到197847最大值即可.

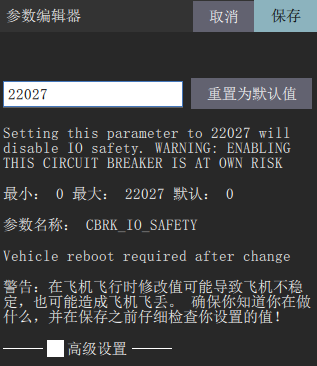
CBRK_I0_Safety:安全开关
当提示无法解锁飞机时,把CBRK_IO_SAFETY数值调到最大值22027,相当于禁用安全开关。

9. PID调参
-
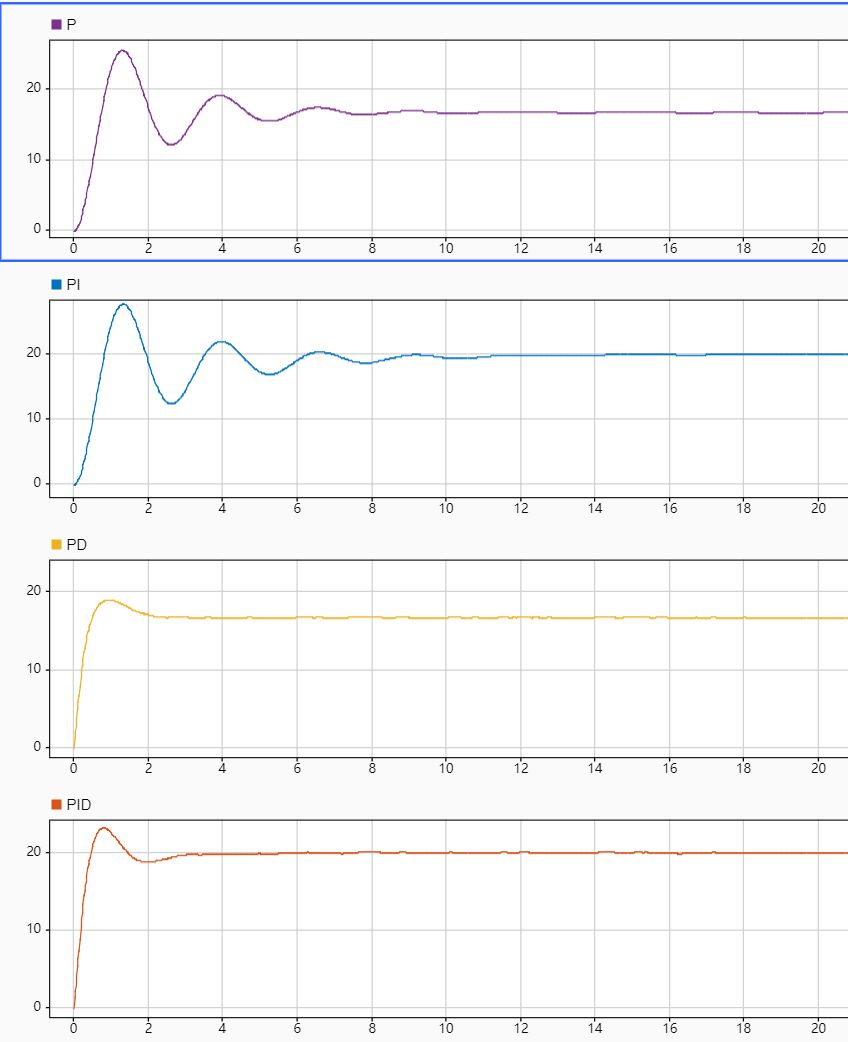
PID调节图示
p为比例项、i为积分项、d为微分项。pid简单来说是一种传函,是在执行器机构传函确定好以后,期望值与观测值有误差,不符合期望值,所以使用pid作为一种调节手段使飞机的观测值达到期望值。pid调参可用如下一张图来解释说明。下图中的期望值为20纯比例P作用下在稳定后有静态误差,为了弥补静态误差,因此引入积分项I。PI作用下,虽然弥补了静态误差,但是因为引入了积分项,使得调节过程中峰值增加,调节周期增长,所以也有不足之处。PD作用下,加快了调节时间减小了调节幅度,但是当系统稳定时与输入有较大误差,D项作用过大的话会引起一定的震动。综合以上,PID作用下,调节的又快又好还没有误差,因此PID调节是理想的控制调节策略。
-
参数调节
在调节参数之前,应该了解px4的代码框架,了解位置控制与姿态控制的关系,内环与外环的关系。
-
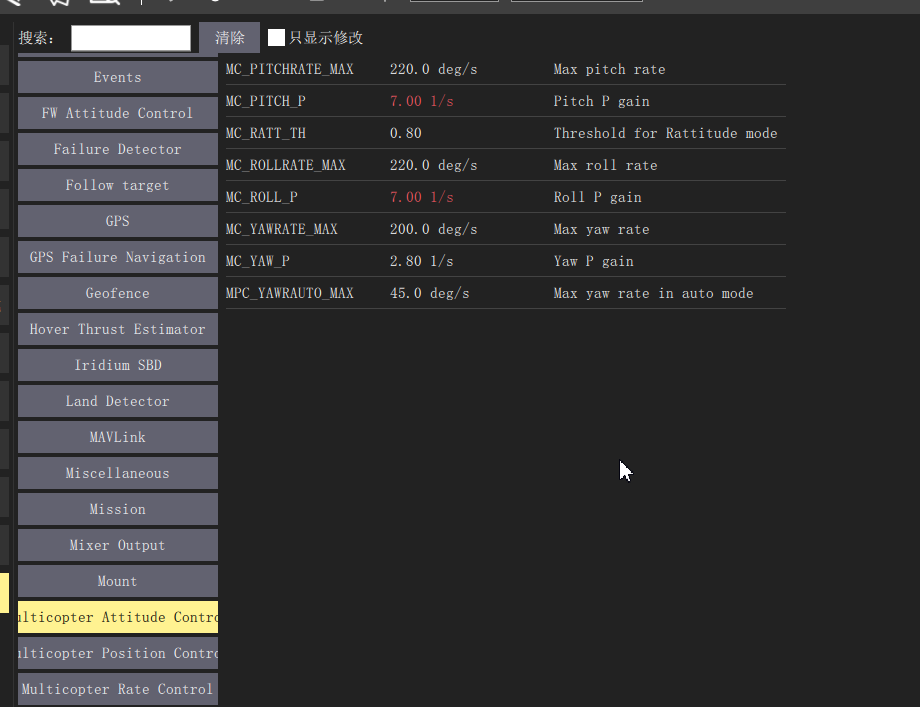
姿态控制的角度环参数
-
姿态控制的角速度环参数

-
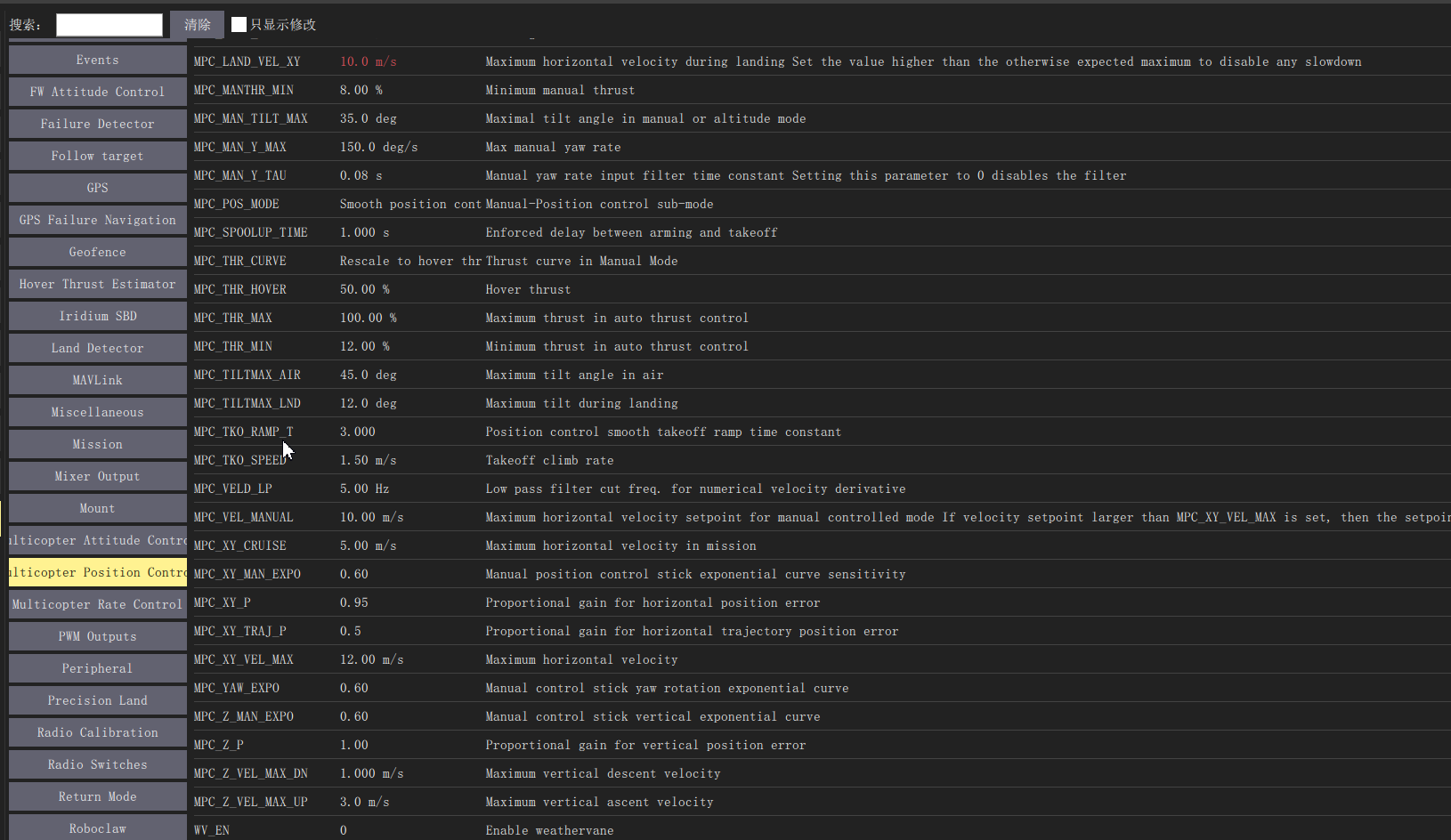
位置控制参数
10. 任务飞行
手动模式
-
ARCO:特技模式
遥控器输入被转换为横滚、俯仰和偏航速度,当摇杆回中时飞行器不会保持平衡,可以用于翻滚等特技飞行。
-
RATTITUDE:角速率模式
遥控器输入在极限区域被转换为横滚、俯仰的角度和偏航的速度,否则被转换为横滚、俯仰和偏航角度。
-
STABILIZED:稳定模式
遥控器输入被转换为横滚、俯仰的角度和偏航的速度,当摇杆回中后飞行器会保持平衡,之后会随风或其他因素漂移。
辅助模式
-
ALTITUDE CONTROL:高度模式横滚、俯仰和偏航的输入与手动模式一致;当摇杆在~50%油门左右,飞行器将保持当前高度;油门有一个很大的死区,超出后控制上升或下降速度。
参数:MPC_Z_VEL_MAX_UP:最大上升速度,默认3.0m/s;
MPZ_Z_VEL_MAX_DOWN:最大下降速度,默认1.0m/s;
RCX_DZ:X通道(油门通道,由RC_MAP_THROTTLE设定)的死区;
MPC_XXX:影响飞行表现的参数,例如MPC_THR_HOVER定义飞行器悬停的油门。
-
POSITION CONTROL:位置模式横滚控制左右移动速度、俯仰控制前后移动速度,当摇杆回中时飞行器会保持位置;偏航控制速度,与手动模式一致;油门控制上升或下降的速率,与ALTITUDE一致;
自动模式
-
HOLD:保持模式保持在当前位置和姿态(依赖GPS)。参数:MIS_LTRMIN_ALT:悬停最小高度(如果悬停高度低,飞行器会升高)。
-
RTL:返航模式返回HOME位置等待或降落(依赖GPS)。飞行器会首先上升到RTL_RETURN_ALT高度(默认60m,如果实际飞行高于此高度则保持),然后直线飞行HOME位置;到达HOME后,会快速降低到RTL_DESCEND_ALT高度(缓降或停止高度,默认30m),会悬停RTL_LAND_DELAY时间后降落(默认0s,设置为-1表示永远悬停);参数:RTL_MIN_DIST:触发上升的最小距离,如果水平位置离HOME很近,飞行器将直接降落到HOME而非升高到返回高度。
-
TAKE OFF:起飞模式起飞并等待下一步指令(依赖GPS)。该模式为自动模式,遥控器失效(除非切换模式),启动前必须先解锁;飞行器上升到MIS_TAKEOFF_ALT高度(默认2.5m)后等待,上升速度为MPC_TKO_SPEED(默认1.5m/s)。
-
LAND:降落模式在当前位置降落。该模式为自动模式(遥控器失效);飞行器在切换到该模式位置降落,下降速度为MPC_LAND_SPEED直至地面
-
MISSION:任务模式飞行器接受地面站的程序控制指令,如果未收到任务,在当前位置悬停(依赖GPS)。该模式为自动模式,遥控器失效,该模式工作前需解锁;任务通常在QGC创建,也可以通过开发者API,上传到飞控。如果任务已存储并且PX4在飞行,将从立即执行任务;如果任务已存储但PX4着陆,PX4将执行任务,如果任务没有TAKEOFF命令,PX4将在执行剩下任务前飞行至最小高度;如果任务未存储或PX4执行完所有任务命令,飞行状态飞行器会悬停,着陆状态飞行器会等待;可以在QGC手动修改当前任务;当飞行器锁定或新任务上传后,任务会重置;任务可以通过HOLD模式暂停,重新激活后会从继续执行当前任务;
飞行模式设置
-
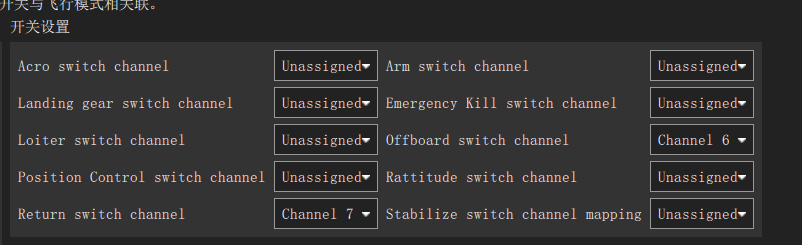
可以在遥控器上设置通道,一般三挡开关对应飞行模式1、飞行模式4、飞行模式6。如图所示,此时通道5设置的三个模式分别为自稳模式、定点模式、降落模式。
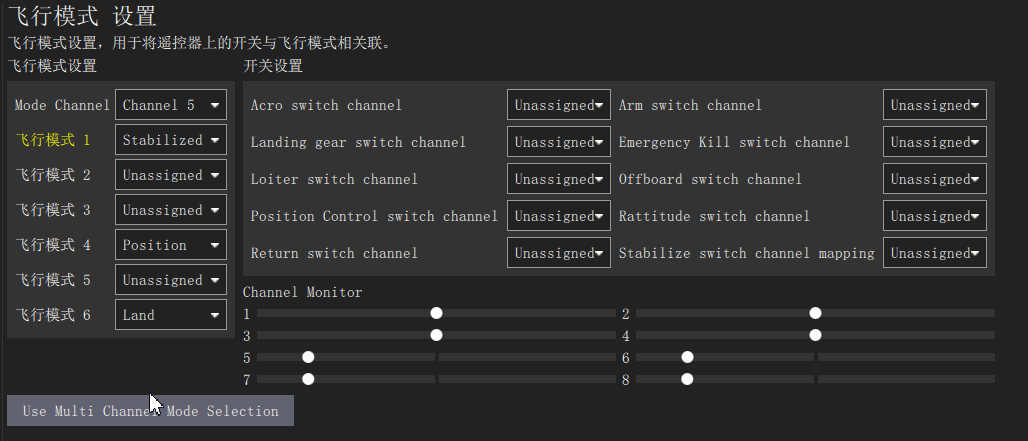
如有需要板载计算机模式和返航模式,也可在开关设置下自行设置。如图所示,设置通道6为offboard模式,通道7为返航模式。