首次飞行(H16遥控器版)
-
本节主要讲解室外GPS下的P600搭配H16遥控器的首次飞行。
注意!
使用室外GPS定位的飞行环境需要在空旷的区域,搜星数量在13颗以上,水平定位因子在1.0或以下时,等待gps尾灯闪烁绿灯的时候即可。
准备工作
-
p600无人机(H16满配版),如下图所示

-
P600电池

-
H16遥控器

-
安全绳

飞行前准备
- 将螺旋桨展开,如下图所示,同时检查螺旋桨是否有松动,再检查下螺丝是否有松动,以及连接线是否对螺旋桨有影响
- 接着我们检查下电池是否有破损、漏液等情况

确保电池没问题后,将电池水平推入电池仓,确保电池不会松动。
注意!
以下为H16版本的操作说明,使用Homer版本的请点击此处跳转。
-
为飞机上电,稍等一两分钟,确保飞机上的遥控器接收机指示灯亮起,如下图所示;

-
点开遥控器主页面上的H16小助手,如图所示;

-
进入如下界面,如下图所示,

-
点击对频,进入如下界面

这是正常连接的状态,H16遥控器已经正常连接,图数传均正常;如果显示未连接,请确保飞机接收端正常启动,指示灯亮起。如需重新对频,将接收机通电后等待10秒后长按接收机SET,白灯闪烁时松开SET。再进入H16助手,点击对频,点击对频(对频成功后会显示已连接)。

提示:
如无必要,请不要进行重新对频操作,无人机出厂时已进行过对频操作。
H16连接QGC
-
确认遥控器正常连接后,回到遥控器主页面,点开QGC进入通讯连接,如图所示;

[1] 点击通讯连接
[2] 点击添加

[3] 将类型更改为UDP
[4] 监听端口改为14551
[5] 点击确定进行保存
然后点击“连接”,连接成功后如下图所示;

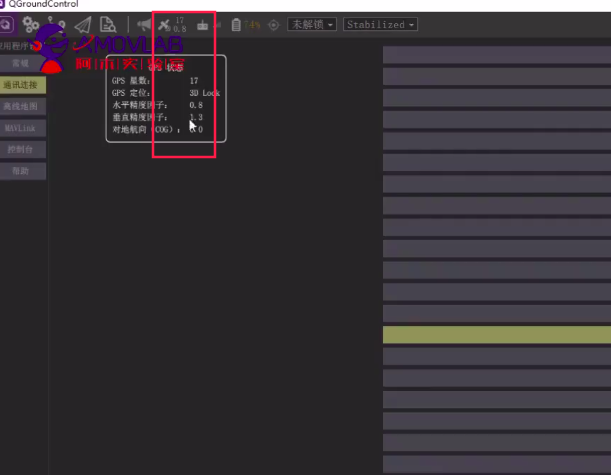
地面站连接成功后,记得检查GPS搜星数量(至少保证搜星数量在10颗以上,即GPS指示灯变为绿色),如下图所示(图示中搜星17颗)
电脑QGC连接飞控
方法一:使用USB-type-c连接
[1] 使用USB转type数据线连接H16遥控器和笔记本电脑,然后打开H16遥控器的设置页面,打开无线与网络→网络共享与便携式热点。

[2] 如图所示打开USB网络共享和便携式WLAN热点。

注意!
使用USB共享网络时,需要先将数据线连接上电脑和遥控器,否则会出现USB共享网络选项无法点击的情况!
[3] 在终端ping一下192.168.144.11,如图下所示就是通路,可以继续下一步。
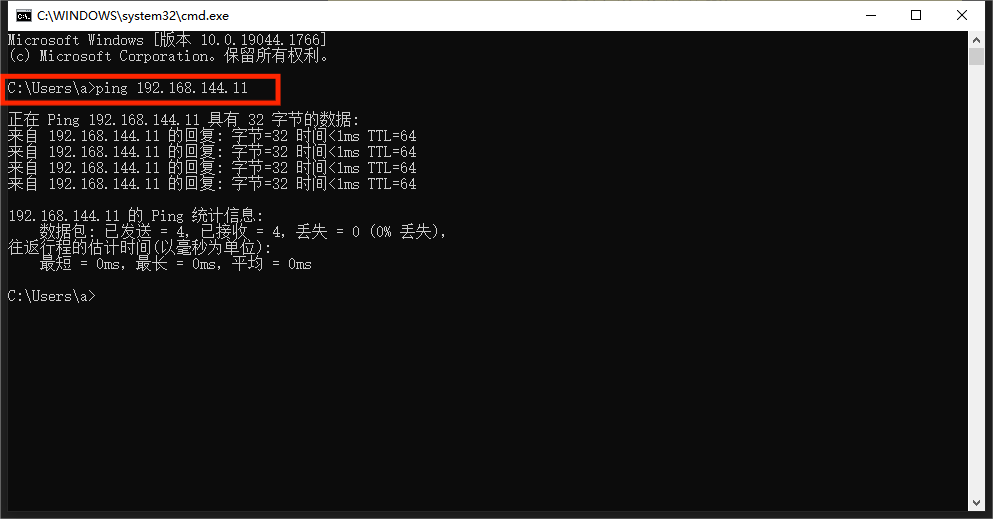
注意!
使用USB共享网络时,需要将电脑上的其他网络连接断掉。
提示:
如果ping不通可以检查一下USB网络共享和便携式WLAN热点是否都是打开状态,重新拔插一下。
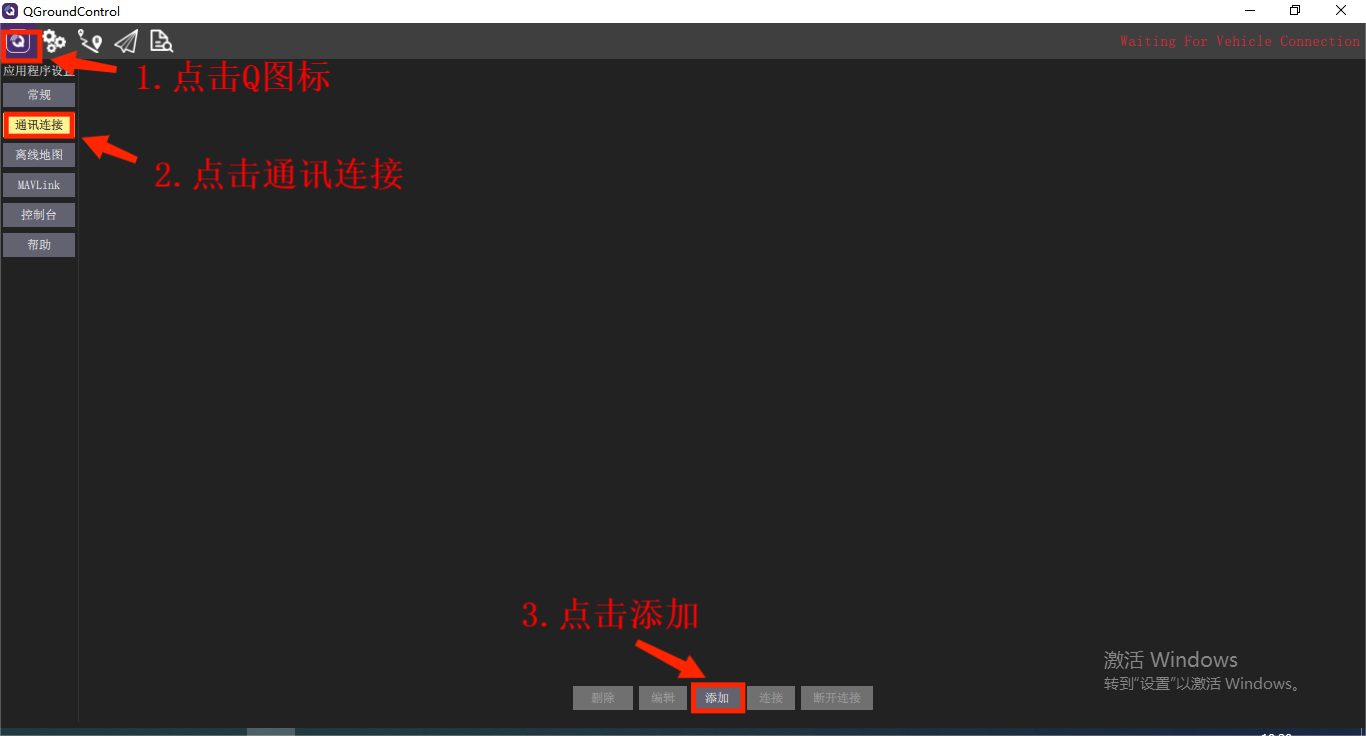
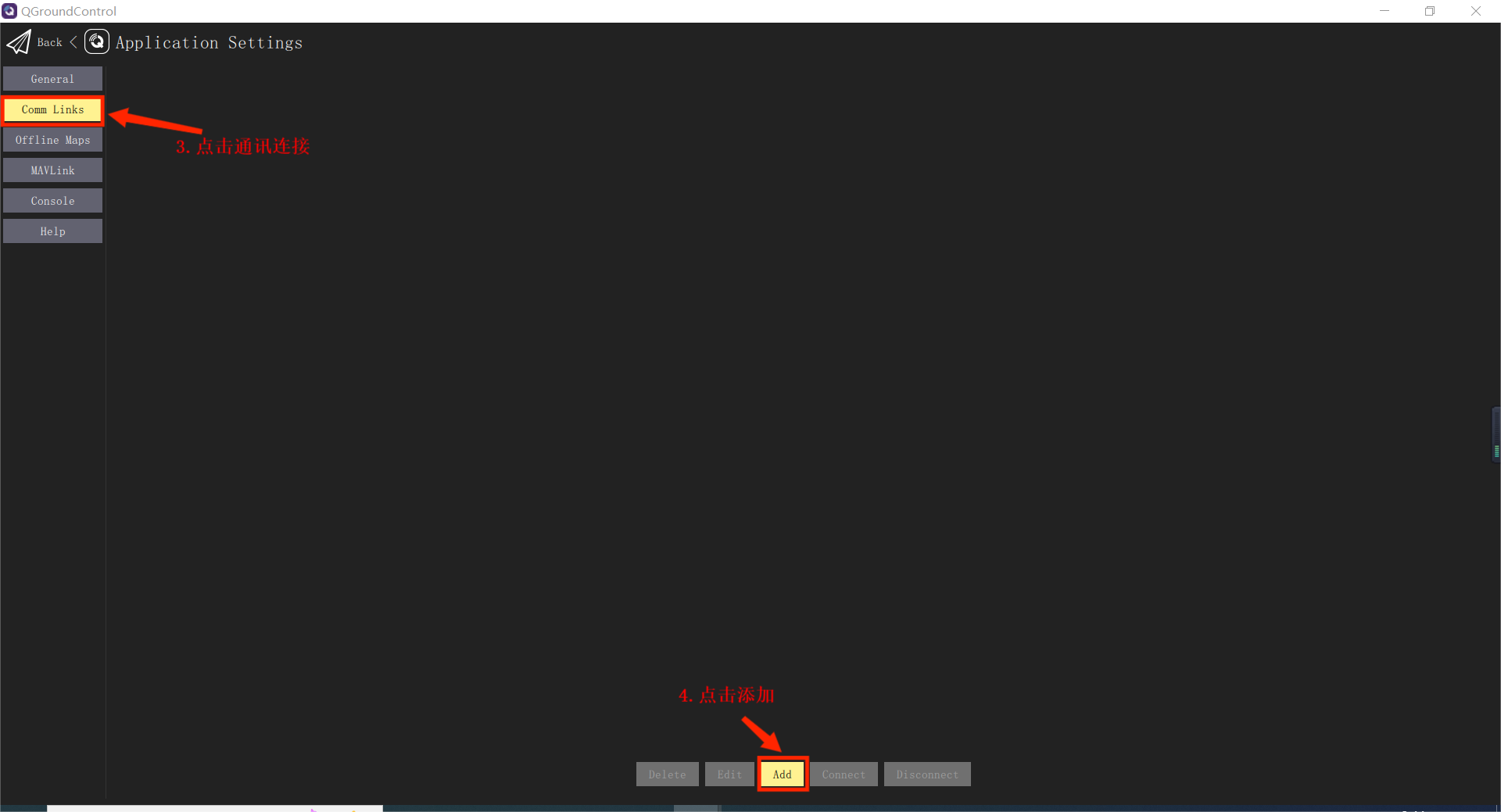
[4] 打开电脑QGC软件,点击左上角Q图标,点击通讯连接,点击添加,如下图所示。
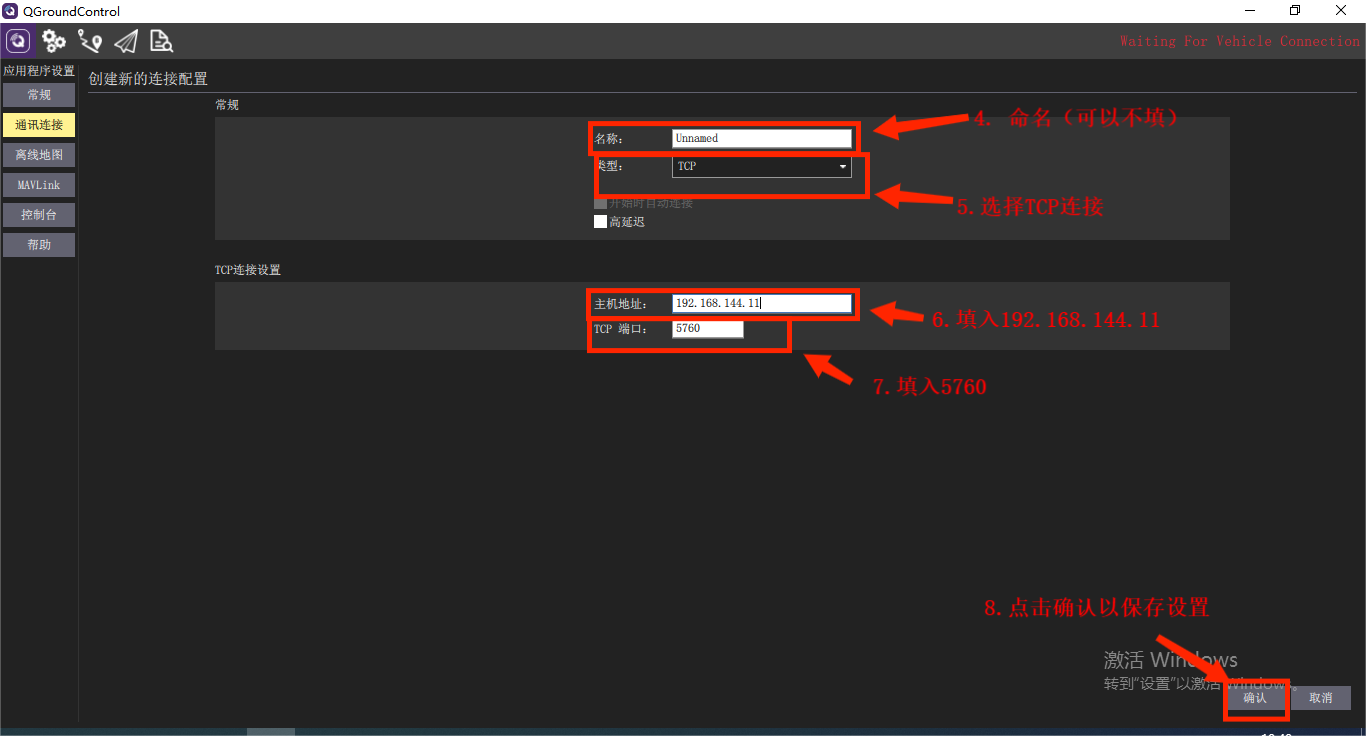
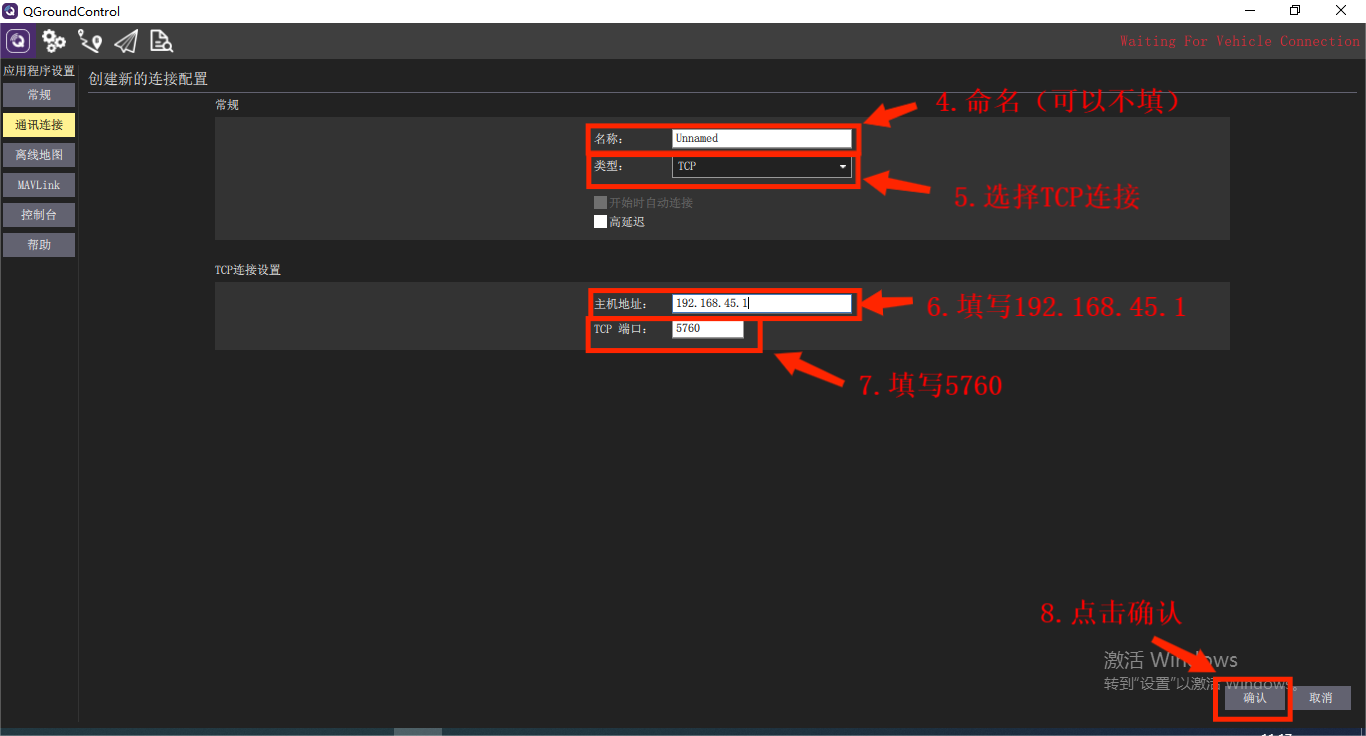
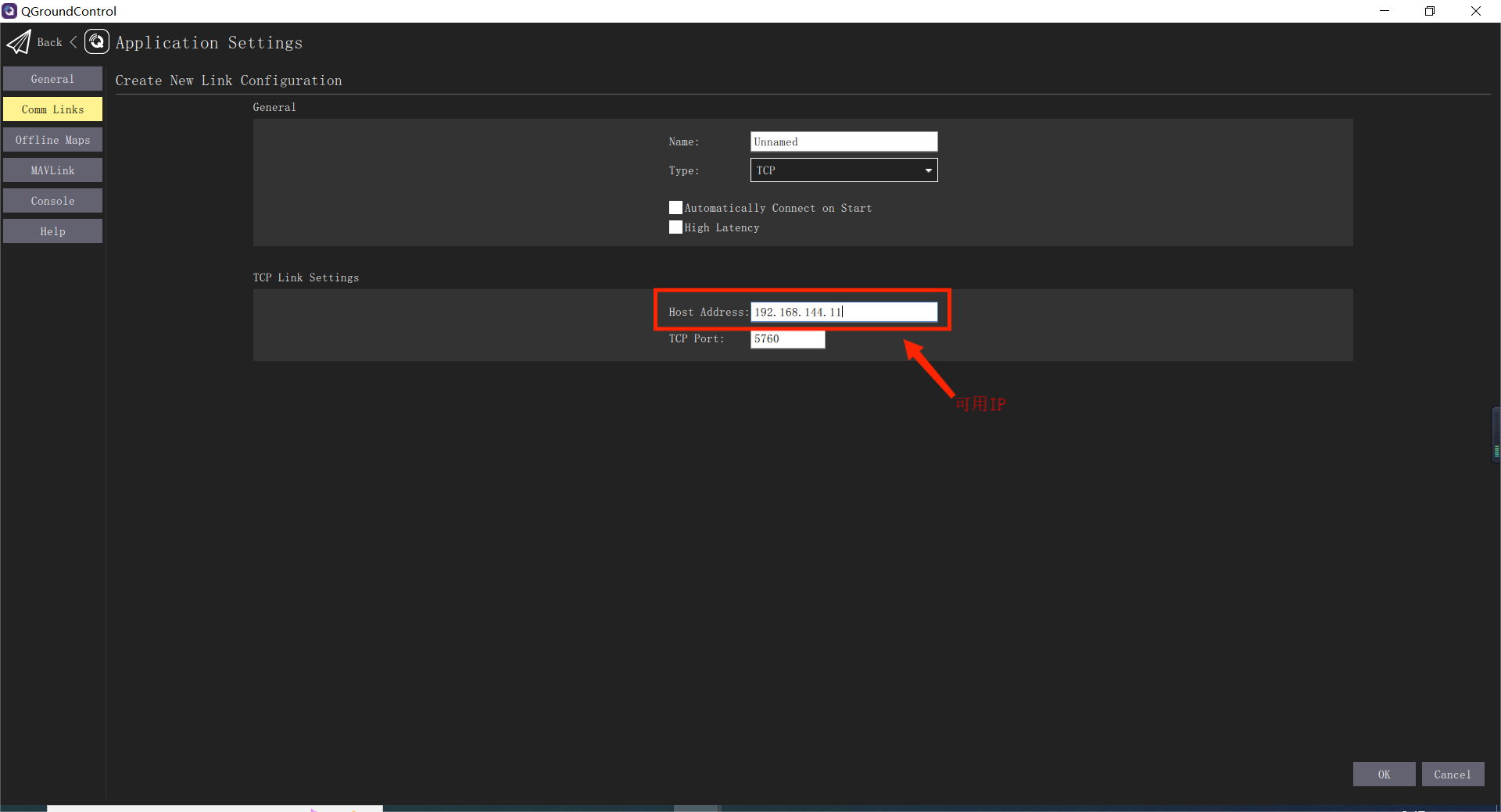
[5] 填写连接名字(可以不填),类型选择TCP连接,主机地址填入192.168.144.11,TCP端口填入5760,点击确认,如下图所示。
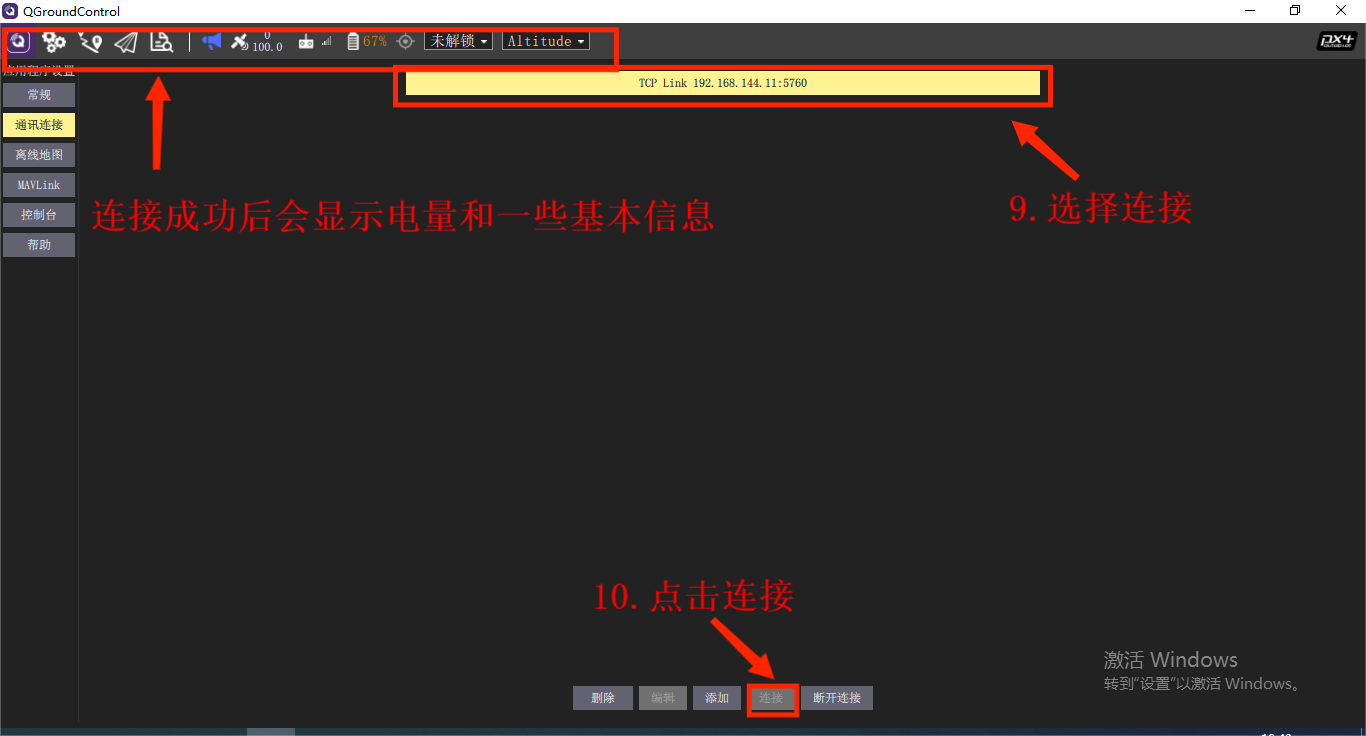
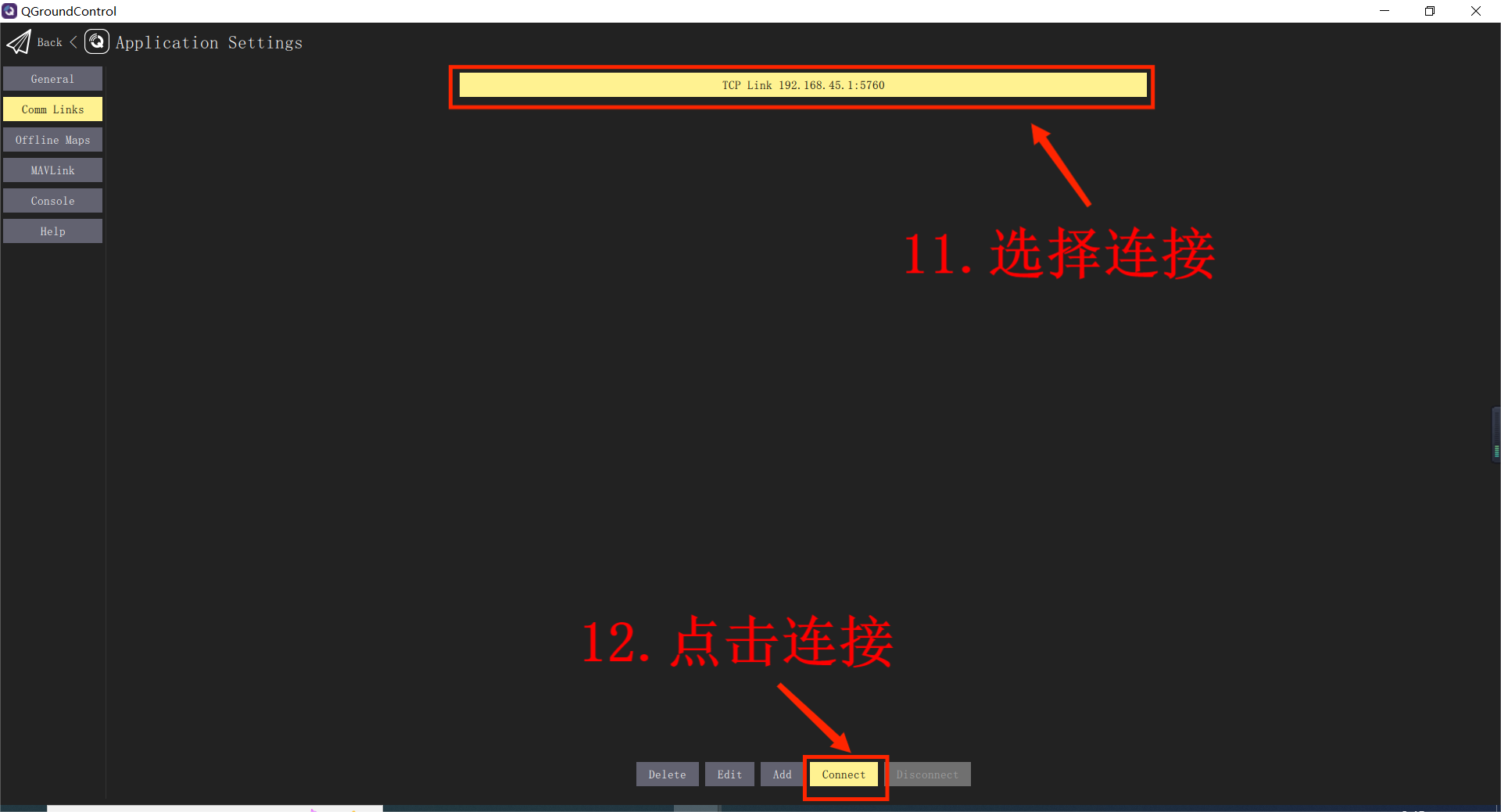
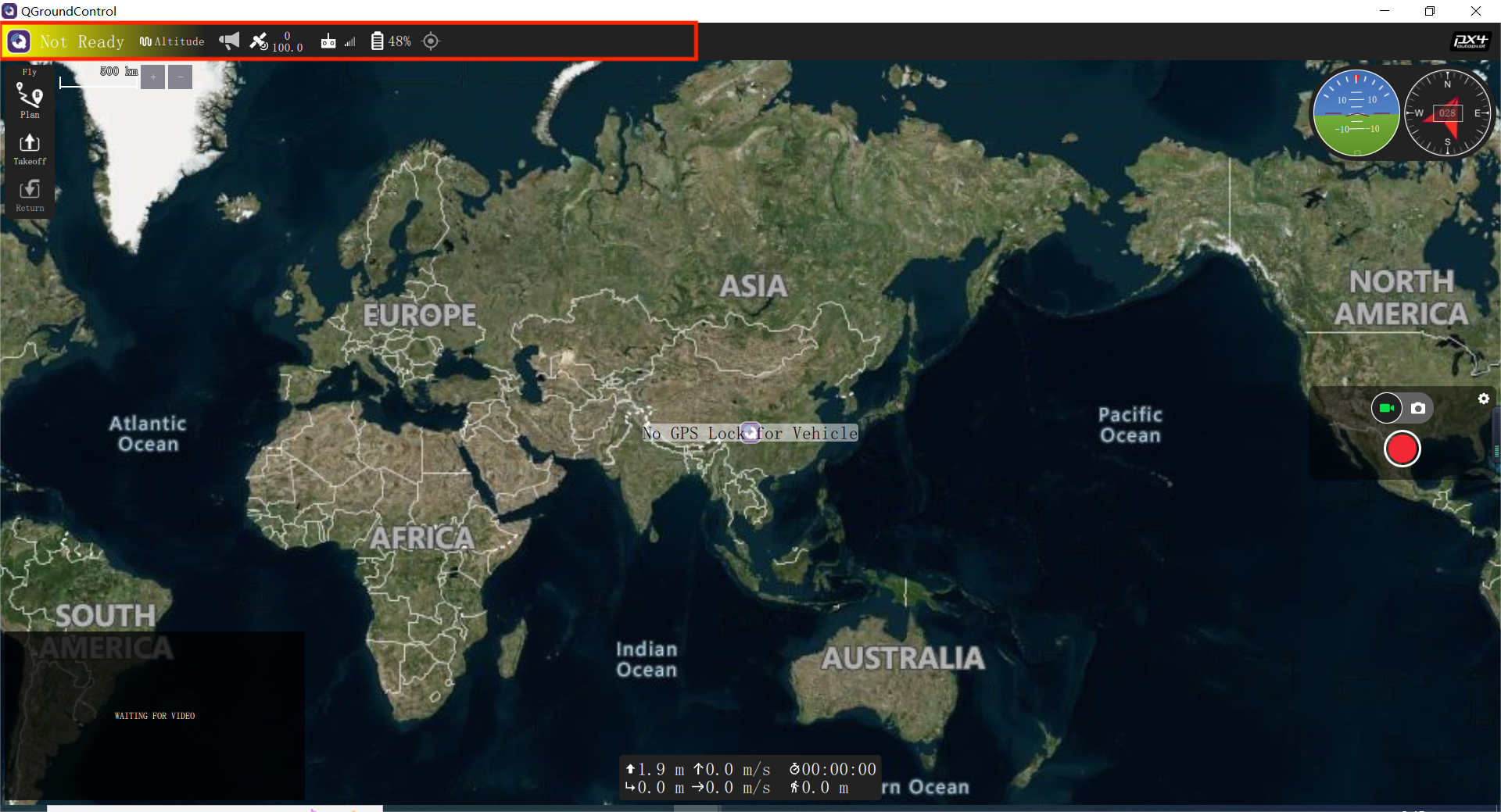
[6] 选择连接,点击连接,连接成功后状态栏会显示电量和飞行模式等信息。
方法二:使用网线连接
[1] 使用网线连接H16遥控器和笔记本电脑,然后打开H16遥控器的设置页面,打开无线与网络→网络共享与便携式热点。
[2] 如图所示打开以太网网络共享和便携式WLAN热点。

[3] 在终端ping一下192.168.45.1,如图下所示就是通路,可以继续下一步。

[4] 打开电脑QGC软件,点击左上角Q图标,点击通讯连接,点击添加,如下图所示。
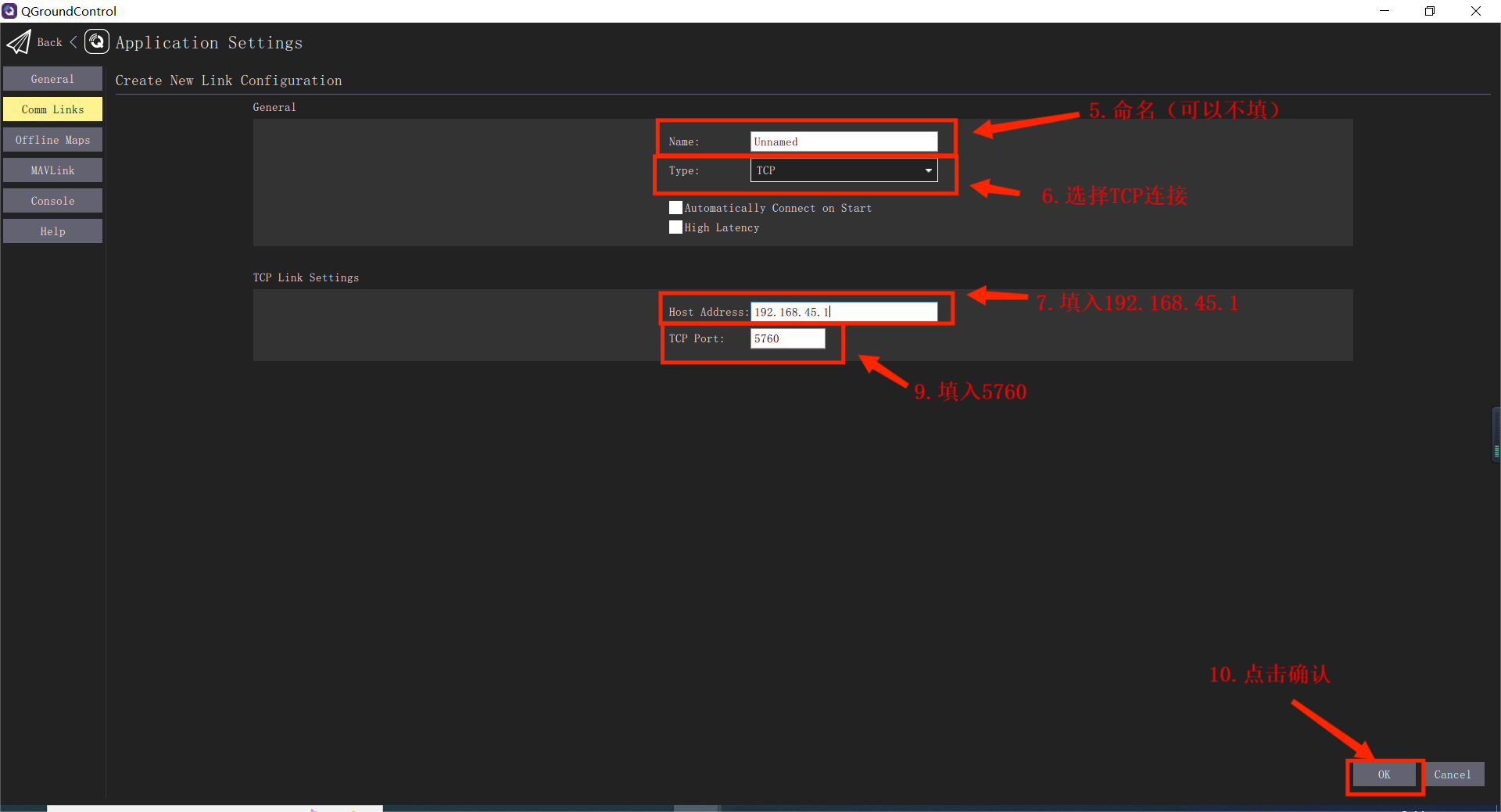
[5] 填写连接名字(可以不填),类型选择TCP连接,主机地址填入192.168.45.1,TCP端口填入5760,点击确认,如下图所示。
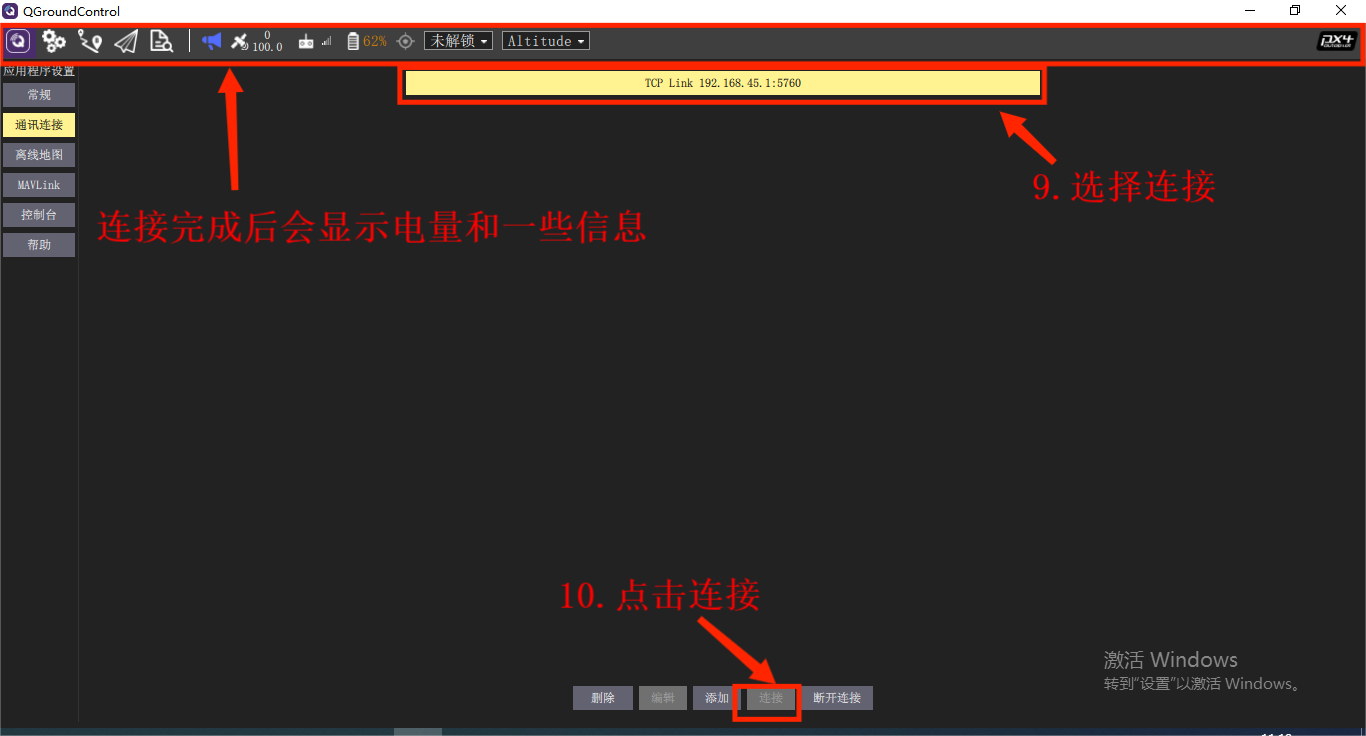
[6] 选择连接,点击连接,连接成功后状态栏会显示电量和飞行模式等信息。
方法三:使用H16热点TCP连接
注意!
H16遥控器的热点只支持5G频段,
[1] 使用网线连接H16遥控器和笔记本电脑,然后打开H16遥控器的设置页面,打开无线与网络→网络共享与便携式热点。
[2] 如图所示打开以太网网络共享和便携式WLAN热点。
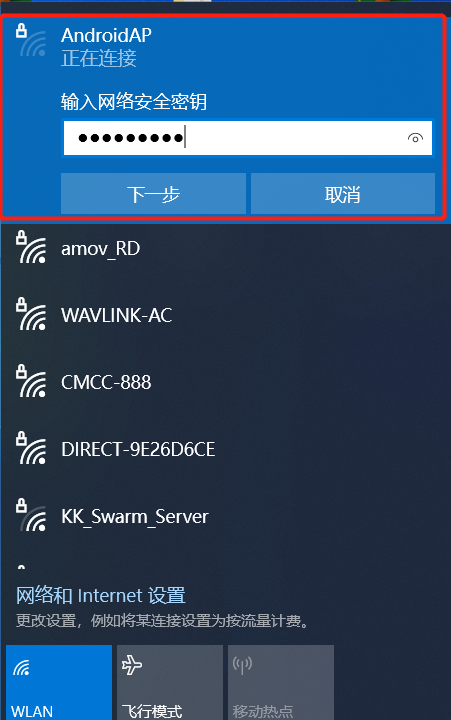
[3] 电脑搜索热点连接,wifi名称和密码可以自行设置。
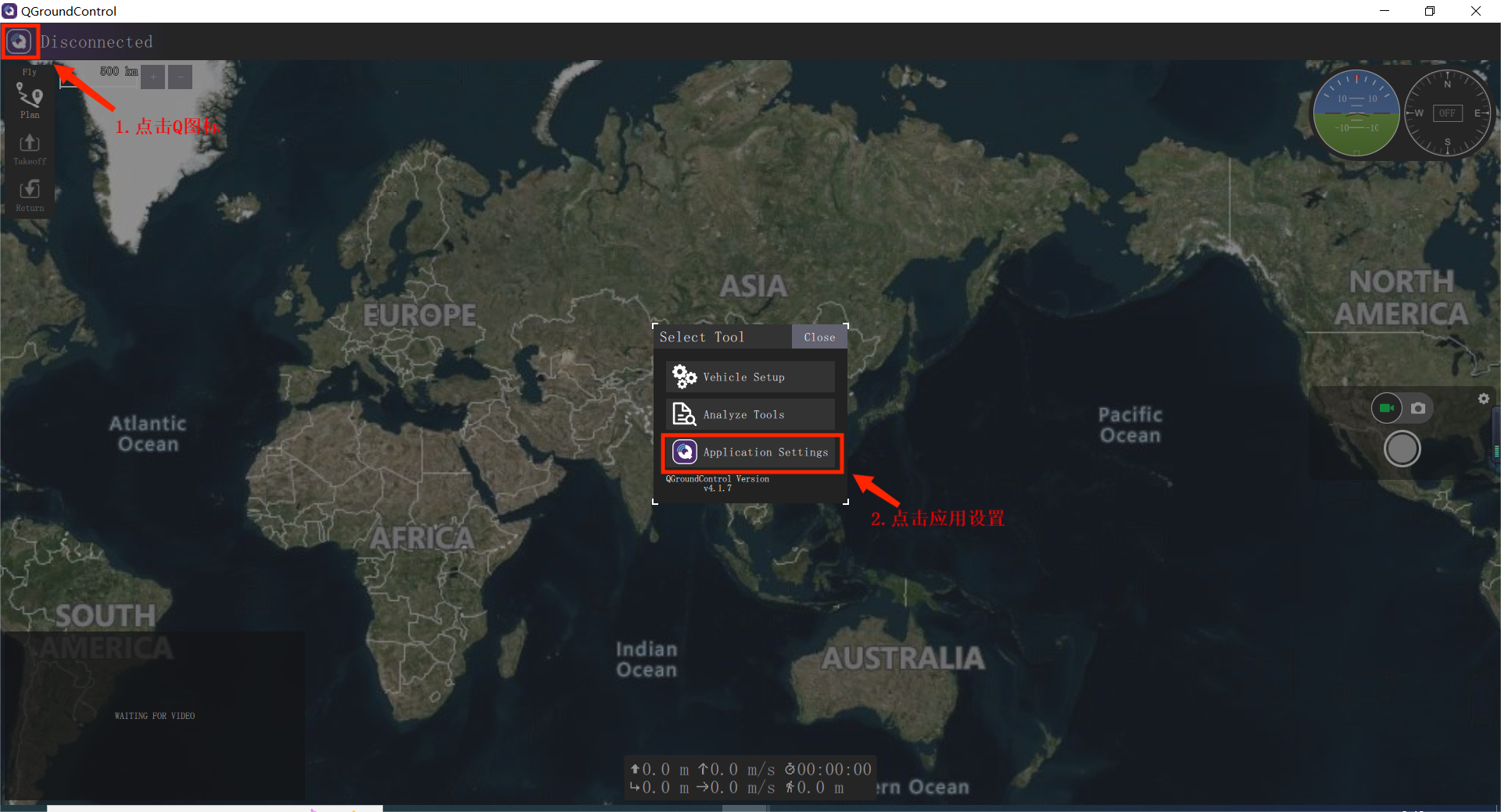
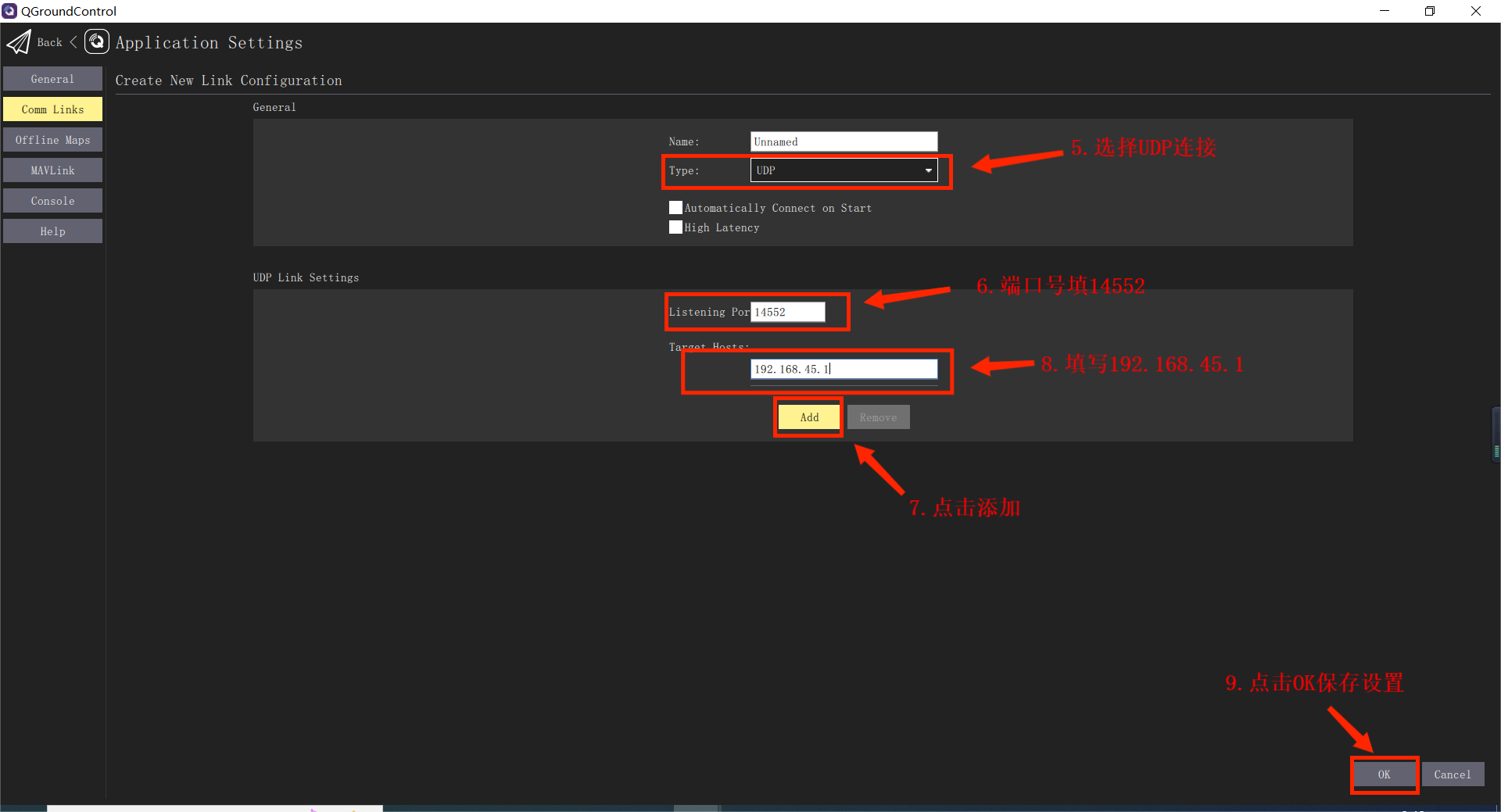
[4] 打开电脑QGC软件,点击左上角Q图标,点击程序设置,如下图所示。
[5] 点击通讯连接,点击添加,如下图所示。
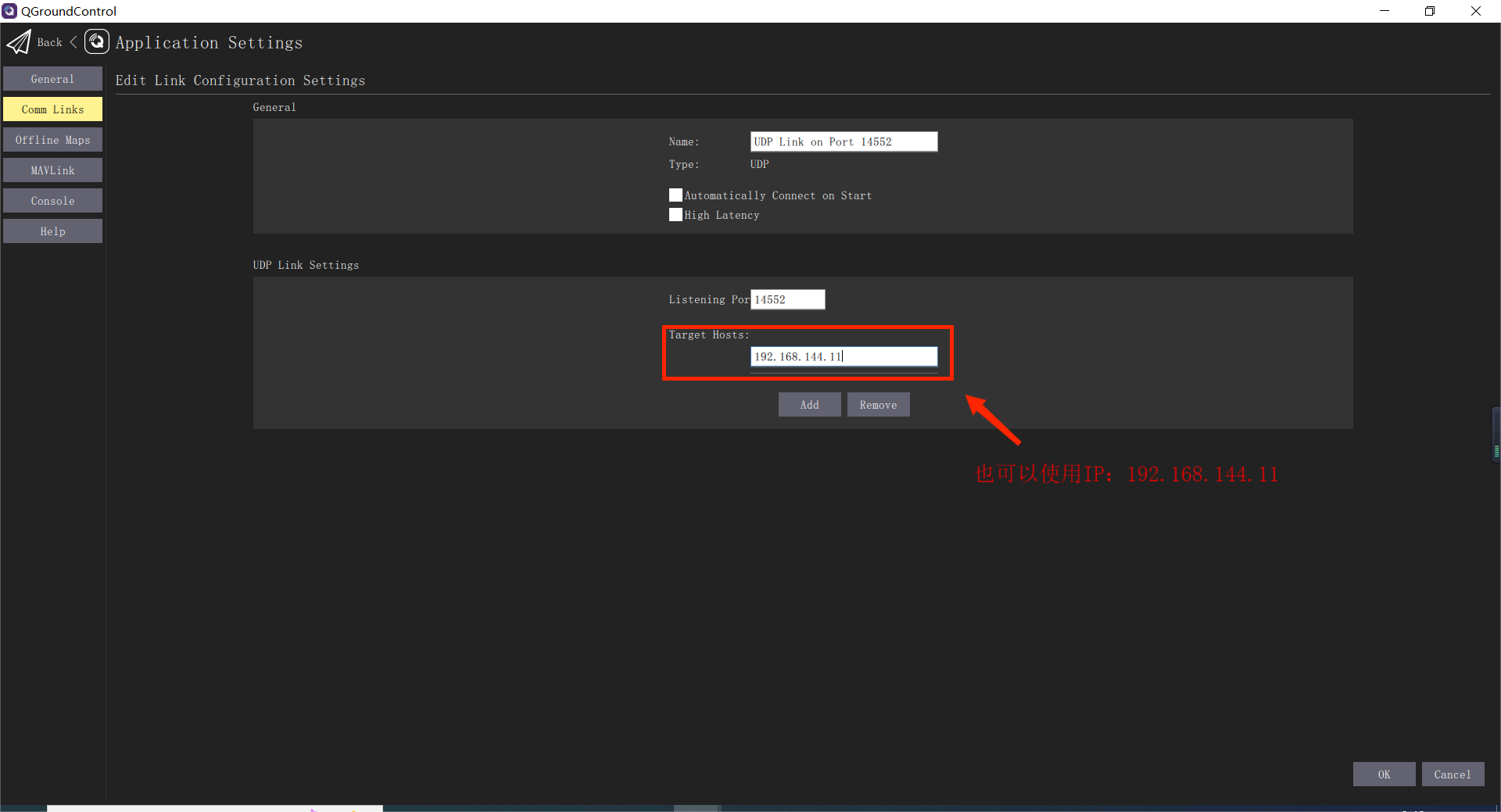
[6] 填写连接名字(可以不填),类型选择TCP连接,主机地址填入192.168.45.1或者192.168.144.11,TCP端口填入5760,点击确认,如下图所示。
[7] 也可以选择UDP连接,类型选择UDP连接,监听端口填14552,点击添加,写入IP地址192.168.45.1或者192.168.144.11,点击OK保存设置,如下图所示。
[8] 选择连接,点击连接,连接成功后状态栏会显示电量和飞行模式等信息。
图传连接
-
使用h16 本身的图传显示点开h16 助手,选择视频查看,如下图

进入界面后,点击屏面下方的摄像图标即可,出厂默认设置的为HDMI/MIPI模式,用来显示通过接收机端MIPI/HDMI传输的图像。 也可以通过设置查看其他的视频流,如下图所示

UART VIDEO模式,可以用来显示单轴云台、MINI摄像头图像(需另接转换板)
自定义模式,用来显示通过天空端的网口来传输图像
h16 本身的图传显示器界面可以自由的缩放,悬浮于主窗口上。
-
在QGC地面站显示图传
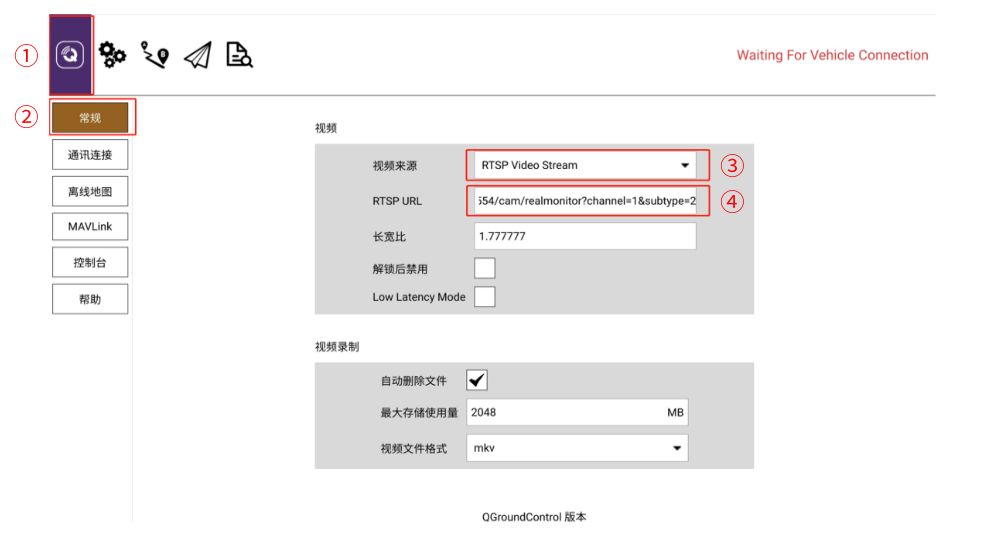
1.点击QGC中的系统设置标识
2.点击常规
3.将视频来源更改为RTSP Video Stresm
显示MIPI、HDMI 图像在RTSP URL中填入
rtsp://192.168.43.1:8554/fpv_stream即可。
使用nomachine连接板载计算机
使用H16连接板载计算机
成功连接QGC后,回到H16主页面,打开主页面上的nomachine,输入板载电脑地址连接即可(出厂默认是192.168.144.60),H16可通过usb接口外接鼠标和键盘操作,机载电脑默认账号和密码为:amov,如图所示:

使用笔记本电脑连接板载计算机
[1] 先根据电脑QGC连接飞控章节,保证电脑能与空中端进行通信.
[2] 检查电脑能否与机载电脑进行通信,笔记打开cmd终端,使用命令ping 192.168.144.60验证是否正确连接
[4] 设置完成后,我们就可以在外接电脑上打开nomachine,输入设置好的板载ip地址(无人机出厂默认ip为:192.168.144.60, 帐号密码为: amov),即可远程操作板载计算机。
正式飞行
-
首次飞行用到遥控器的两个摇杆和一个拨杆:
左边的摇杆:上下控制无人机的高度,左右控制无人机的偏航;
右边的摇杆:上下控制无人机的前进与后退,左右控制无人机的向左与向右;
拨杆SWC3(SWC):飞行模式切换开关,上位代表定高模式,中位代表定点模式,下位代表降落模式。
确保遥控器、飞机上的桨叶与螺丝没有松动的情况下,将电池沿着滑槽滑入并最后卡住,并且按下开机按钮
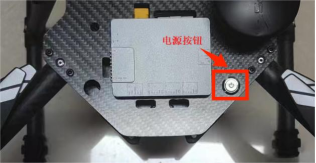
-
电源按钮灯亮以后证明开机成功
-
在地面站查看无人机电池电量,降到22.2V时建议充电

-
查看无人机的姿态球,上图,3表示姿态球,4、表示无人机的高度,5表示航向角
查看控制模式,操作方式为控制遥控器SWC3通道,分为上、中、下三通道,分别对应不同的模式
注意!
新手的话建议使用position定点模式警告!
在室外飞行一定要连接上QGC地面站,在拨到定点模式时查看GPS卫星数量,以防出现未拨进定点模式或者定点很差的情况!进行室外飞行时保持遥控器处于开机状态!(短距离飞行也可以拴上安全绳)以防止无人机参数出错而飞行出错炸机或者无人机丢失!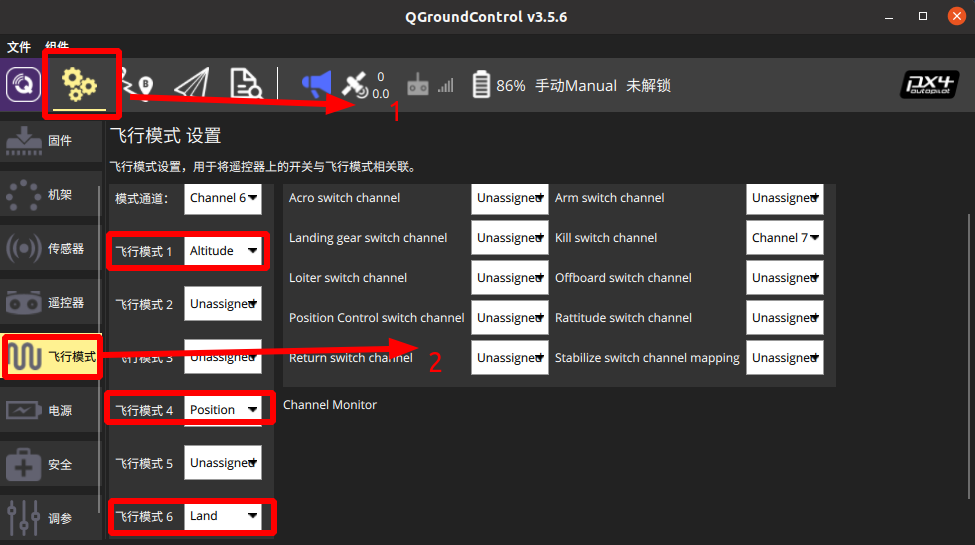
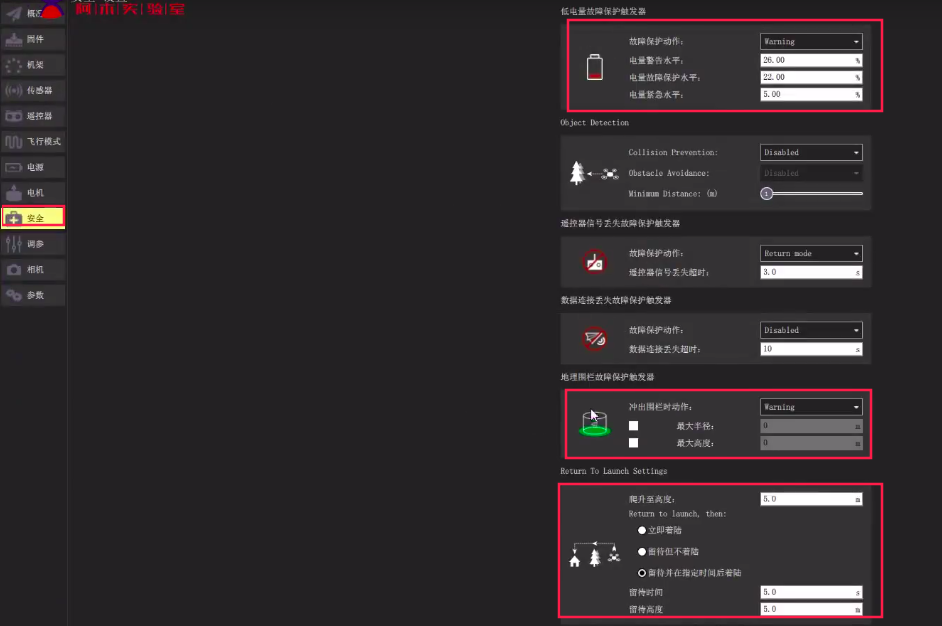
也可以查看下安全模式,主要是看低电量保护、地理围栏、以及返航高度(需根据周围环境进行设置),如下图:
确认切到定点模式后,将左手摇杆向右下解锁无人机,然后缓慢往上推,将油门推过50%的时候电机会加快转速,无人机会缓慢起飞,然后缓慢拉低油门,降落下来后,等待电机处于怠速状态,左摇杆左下上锁,开始测试任务规划,首先我们需要清除上次规划的航点,然后设置起飞点
警告!
降落时请务必等待电机处于怠速状态再进行上锁操作,处于非怠速状态左摇杆左下上锁会使无人机倾斜倾倒甚至炸机!清除航点

设置起飞点

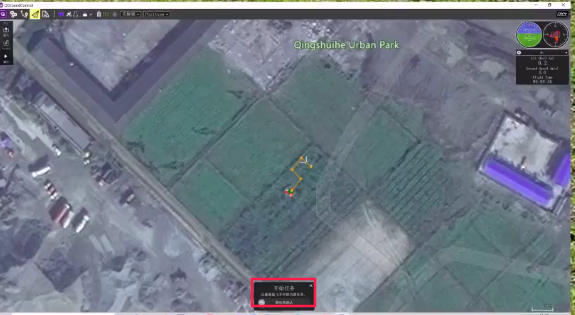
设置航点,途中标记3的位置为航点距飞机的距离

可以设置飞机飞航点的高度与距离,设置完成后点击右上角的上传

滑动解锁任务
确认为定点模式,gps信号正常后即可解锁飞航点
注意!
若有异常,比如不按照航线去飞,则通过切到定高模式,再切回定点模式,会取消任务进行手动控制
飞完航点后,可进行一键返航,点飞行模式,然后选择return即可

之后飞机会回到其实起飞的高度并自动降落

降落后左摇杆左下上锁
上锁后,长按电源键五秒给无人机断电,电机灯熄灭后证明断电成功,然后拔掉电池,关闭遥控器

视频演示
-
Homer版首次飞行视频教程:
-
H16遥控器使用视频演示: