WIFI配置
本教程将会引导读者如何配置 路由器以及小车WIFI
提示
- 本内容作仅仅针对想要进行二次开发和自定义的用户
- 如果在使用途中存在IP冲突,可以根据以下内容修改
- 以下内容在用户拿到手里后已经配置完毕,如非必要,切勿修改
注意
整个
KKSWARM项目使用的路由器 均不连接至公网 ,即路由器仅仅提供局域网。
配置路由器
提示
参考路由器包装内部的使用手册,这里做简单摘要。
-
将路由器开机,同时打开一台电脑,将电脑连接至
KK_Swarm_Server网络。输入密码为22222222 -
此时浏览器将会自动打开路由器的配置界面,如果没有。则手动打开浏览器,输入
http://router.asus.com,进入配置界面。然后在配置界面输入登录名称为:
KK_Swarm_Server密码为:
22222222如图2所示:
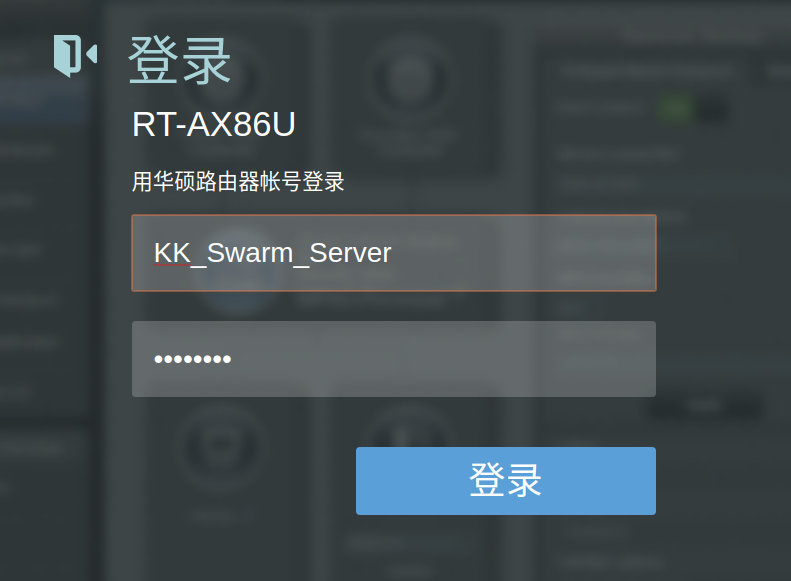
图2 WIFI登录界面
注意
- 上面的配置并非是华硕路由器出厂设置,这是在发货测试前的配置。目的是为了让用户做到开箱即用。
- 如果您想要自定义WIFI名称和密码,可以在上述界面进行设置,抑或是将路由器恢复出厂设置后自行按照路由器使用手册进行配置
- 同时,如果您自定义了WiFi名称和路由器,相应的,要对每辆小车的WIFI进行设置。具体见本文后续内容
设置固定IP
KKSWARM 的迷你主机的固定IP为:192.168.50.100。用户可以根据实际需要,进行修改。修改方法如下:
-
首先将迷你主机连接至
KK_Swarm_Server网络 -
依次打开
设置--WIFI--KK_Swarm_Server 网络旁边的齿轮符号--IPV4--Manual如图3所示
图3 配置MINI主机的固定IP
警告
小车WIFI在出厂的时候已经配置好并且经过测试,如非必要,请勿修改!
配置小车WIFI模块
这里以 7 号小车为例
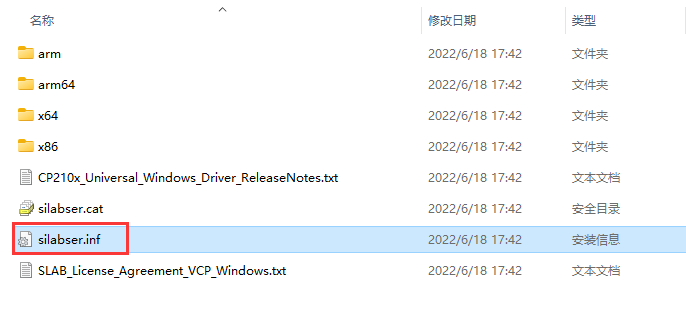
图4 安装串口驱动
- 然后将小车外壳打开,取下WiFi模块,安装在WIFI模块配置地板上,并将地板通电。
- 将用TTL转USB线连接地板,如图5所示:
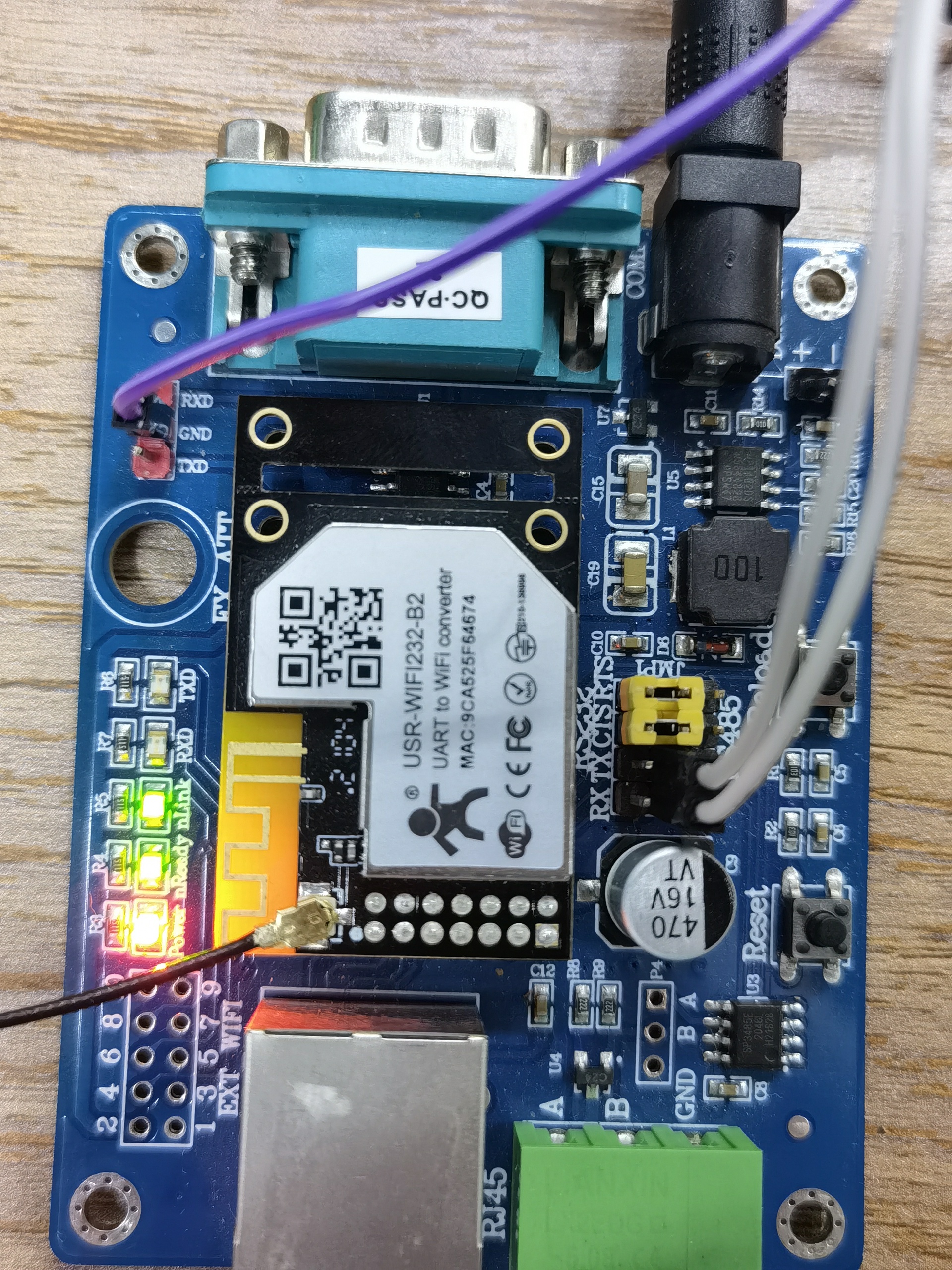
图5 连接底板
注意
- 底板的
TX应该与TTL模块的RX连接;底板的RX应该与TTL模块的TX连接- 底板
TX和RX的位置在RS485字样的中间
- 然后打开串口配置软件,连接至将波特率设置为
115200,点击连接。如图6所示:

图6 串口连接
提示
COMx由系统分配,这里为COM5
- 点击
模式选择,将工作模式设置为STA,数据传输模式设置为Through。然后点击配置该页使其生效。如图7所示:
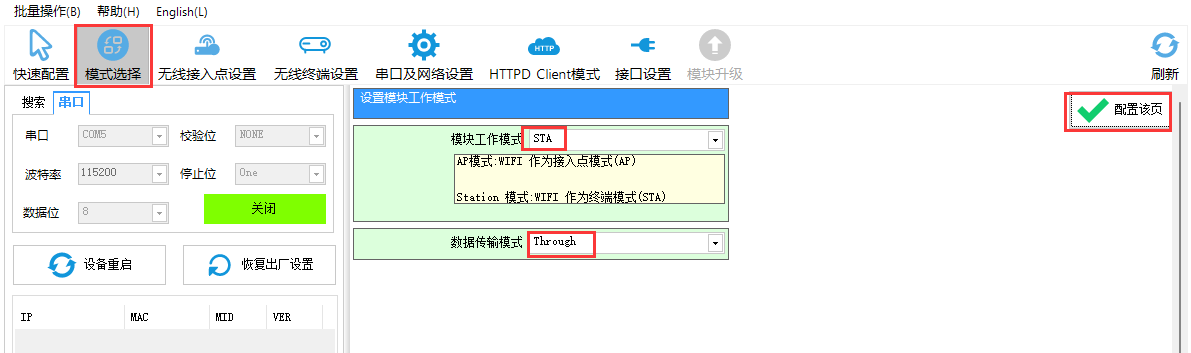
图7 工作模式
- 点击
无线终端设置,点击 搜索 按钮,找到刚才设置的路由器的WIFI名称,同时输入密码。接着将该模块的IP地址设置为固定IP。然后点击配置该页使其生效
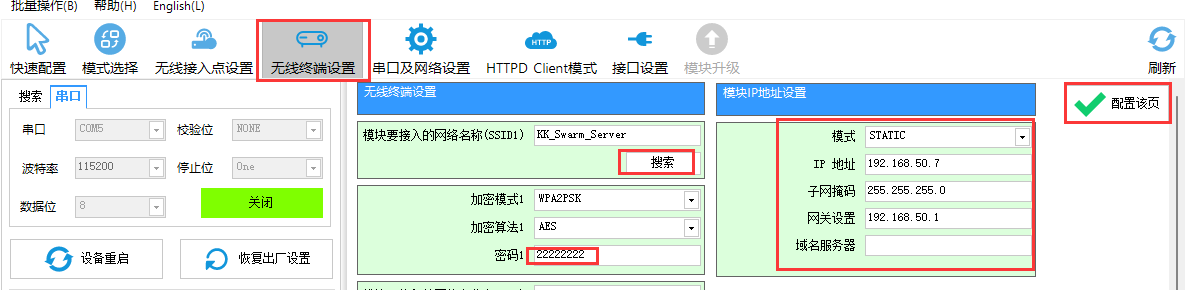
图8 无线终端设置
提示
这里说明一下IP和小车的关系:
- 小车WIFI模块和小车本身 不是强绑定,设定固定IP是为了方便查询小车连接状况和检查通信状况。您可以可以设置为动态IP
- 由于MINI主机的IP是
192.168.50.100,因此,每辆小车的固定IP为192.168.50.x,其中x为小车编号。这里为7号小车,故设置IP为192.168.50.17- 再次强调,固定小车IP为 可选项,可以设置为动态IP。
- 点击
串口及网络设置,务必按照图9红框所选设置。设置完成后,点击配置该页使其生效
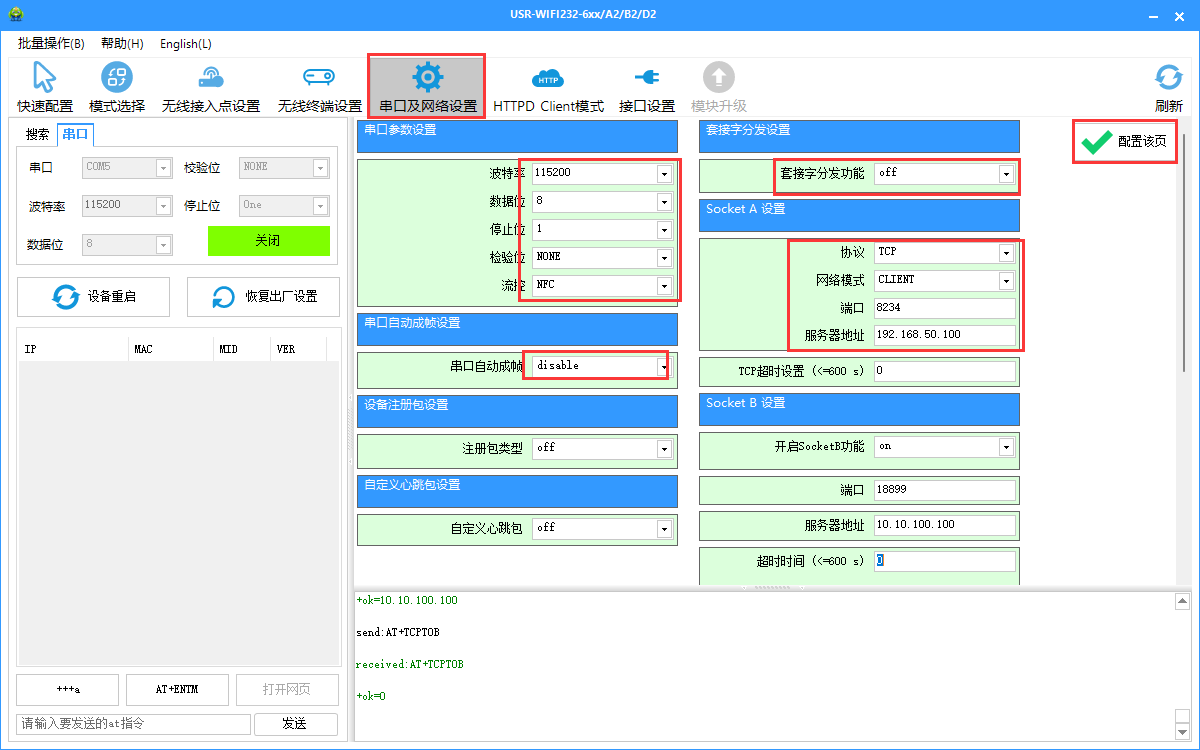
图9 串口及网络设置
- 在软件的左下角命令行处,输入命令
AT+FUARTTE=fast并点击 发送,如图10所示:
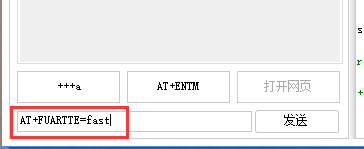
图10 发送指令
-
点击
设备重启完成配置 -
将 WIFI 模块重新安装在小车上
-
打开MINI主机的终端,输入命令:
roscore
- 打开终端,输入命令
rosrun tcp_communication tcpDriverNode
等待小车连接,如图11所示:
图11 连接成功
- 打开终端,输入命令
ping 192.168.50.17
观察是否连接成功。或者进入路由器的后台网址 http://router.asus.com 查看是否连接成功。如图12所示:
- 打开终端,启动键盘控制节点
python2 ~/kk-robot-swarm/swarm_control.py
通过键盘控制,观察小车是否收到控制指令。如果收到,表示WIFI配置成功。如果失败,请尝试从新开始设置