功能演示前期准备
本教程将会引导读者完成功能复现的前期准备工作,以确保功能的顺利运行。
环境准备
-
确保已经成功安装 软件环境。如果您是购买过本产品的读者,可以忽略此步骤。
-
确保已经成功 搭建场地
-
确保已经成功 校准相机
-
确保已经成功 设置路由器。如果您是购买过本产品的读者,可以忽略此步骤。
-
根据实际环境情况,设置好海康威视相机的参数。由于场地的不同(主要是 光照)。在进行二次开发或者复现功能的时候, 可能会存在失败的情况,例如:无法识别到二维码。
注意
此步骤仅需设置一次,但是如果更改了环境(特别是 光照前后变化明显 ),例如:同一间场地,同样的灯光,在白天和晚上的光照是不一样的。但是需要重新设置以满足新环境
调整相机参数步骤如下:
- 打开终端,输入以下命令
cd /opt/MVS/bin
./MVS.sh
此时将会启动海康威视的操作界面,如图1所示:
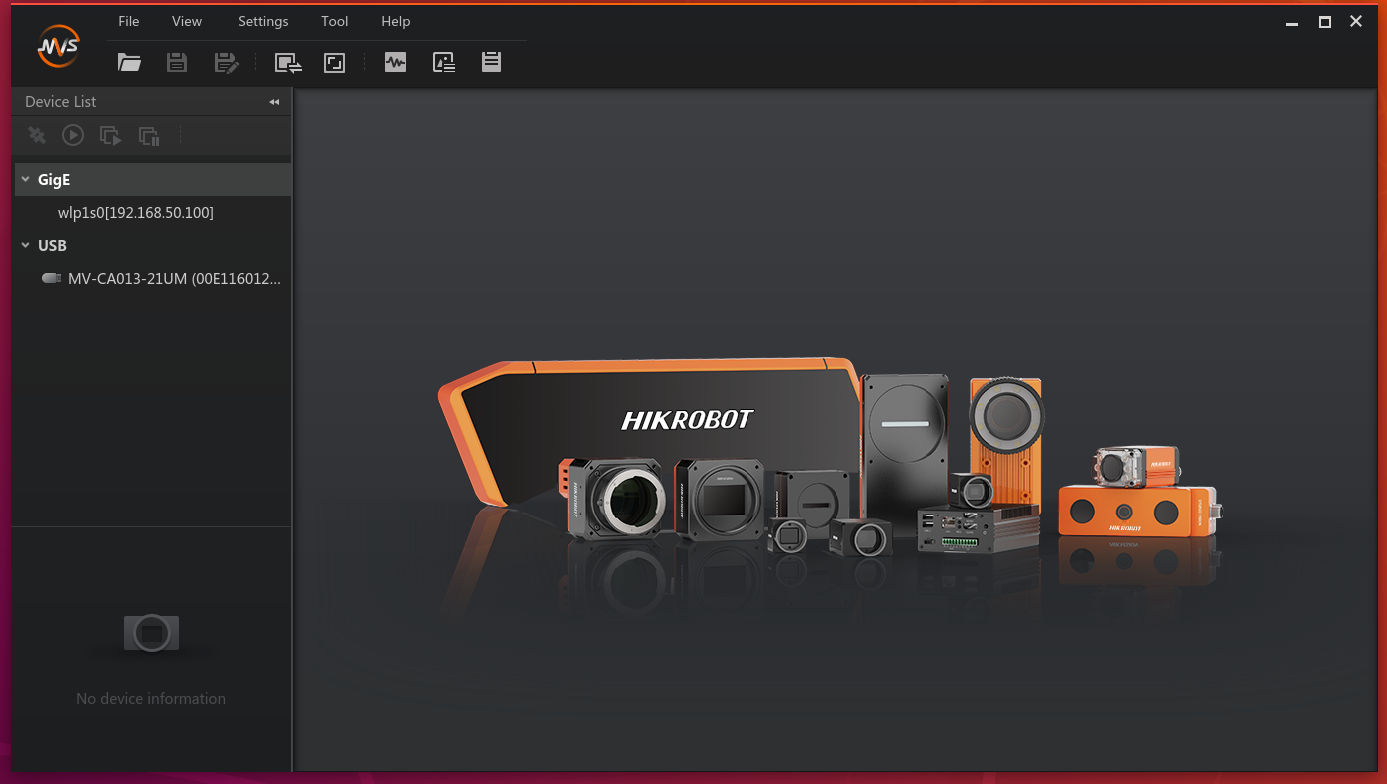
图1 海康威视相机界面
- 可以看到当前连接的设备是
USB方式,以及相机型号为MV-CA013-21UM。将鼠标放置在相机型号上,将会出现一个 连接 的符号,点击连接。然后在中间的区域的菜单上点击 采集 按钮。如图2所示:
图2 连接相机
- 点击右边界面菜单栏上的
Common字样,进入相机的详细配置。如图3所示:
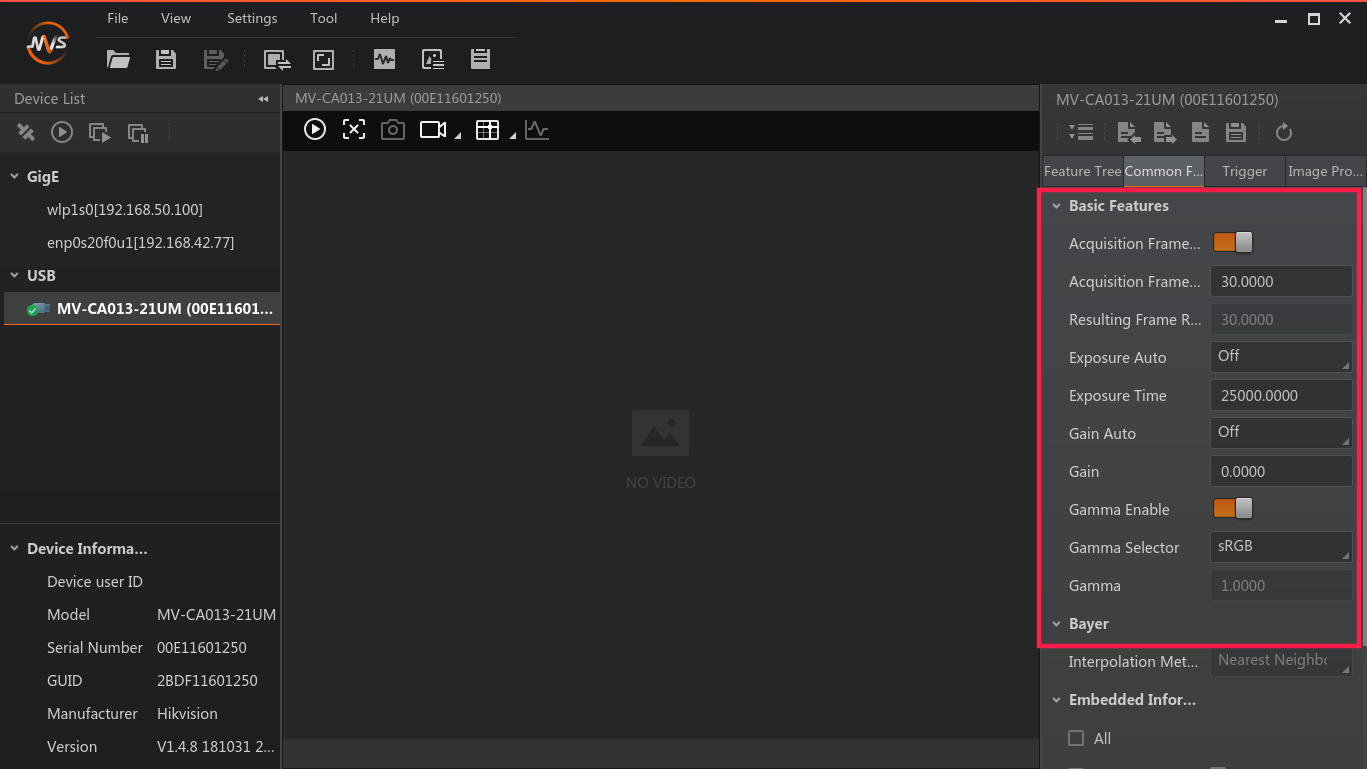
图3 配置界面
将采样频率设置为30,伽马设置为sRGB。曝光时间根据实际的场地进行调整。
等参数,让图像采集区域采集的图像的 对比度 明显。这个需要根据具体的场地光照去调节参数。
当调节好以后,启动场地光照直方图程序,并按照 场地标定 内容进行处理。
当调节好相机参数以后,可以打开rviz,启动定位系统,用键盘控制小车在场地移动,观察是否都能识别。具体步骤如下:
- 启动 roscore
roscore
- 启动相机界节点
注意
启动前,务必关闭海康威视自带的相机界面。否则将会产生冲突
rosrun camtoros camtoros
- 启动通信节点
rosrun tcp_communication tcpDriverNode
- 启动定位系统
roslaunch apriltag_ros continuous_detection.launch
roslaunch global_vision start.launch
- 打开rviz
roscd camtoros/config
rviz -d tf.rviz
- 启动键盘控制节点
python2 ~/kk-robot-swarm/swarm_control.py
控制小车在场地中移动。观察rviz中是否出现坐标系断连或者卡顿的情况