通信协议
本教程将会引导读者了解 KKswarm 项目,上位机(迷你主机)和小车之间的通信协议以及相关的内容。
提示
上行和下行协议的解析均在
kk-robot-swarm/src/tcp_communication/src/tcpDriverNode.cpp文件中
上行协议
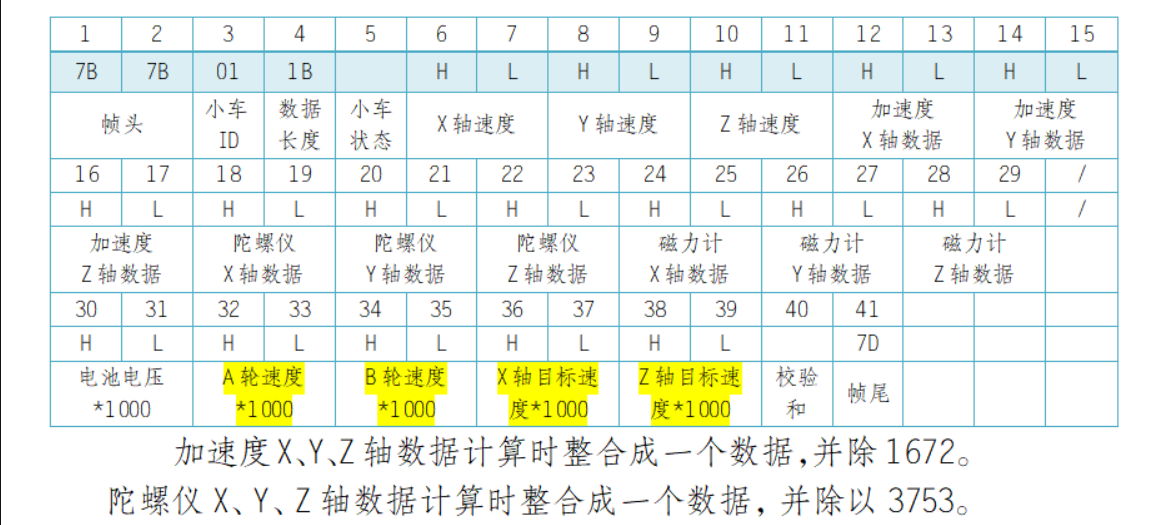
上行协议,指小车发送给上位机的数据。包含了小车ID、小车电量、小车的线速度、角速度等信息。
上行协议解析相关代码见 tcpDriverNode.cpp 文件中的函数 void parsingUpProtocol(int connfd, unsigned char buff[],int size)内容
下行协议

下行协议,指上位机发送给下位机的数据。主要是控制小车的线速度和角速度。
下行协议解析相关代码见 tcpDriverNode.cpp 文件中的函数 velReceviveCallBack(const geometry_msgs::Twist::ConstPtr &msgs, int id)内容