pure_pursuit算法原理
Pure Pursuit是一种几何跟踪控制算法,也被称为纯跟踪控制算法。该算法最早由R. Wallace在1985年提出,其思想是基于当前车辆的后轮中心位置(车辆质心),在参考路径上向$l_d$称为前视距离)的距离匹配一个预瞄点,车辆以一定角度全速向次预瞄点行驶。
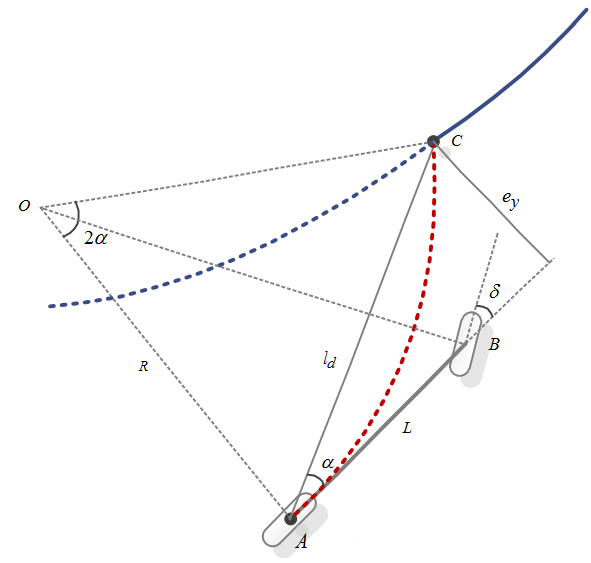
假设车辆后轮中心可以按照一定的转弯半径𝑅行驶至该预瞄点,然后根据前视距离$l_d$、转弯半径𝑅、车辆坐标系下预瞄点的朝向角𝛼之间的几何关系来计算前轮转角$\delta$
pp算法模型
如上图所示,在三角形OAC中,根据正弦定理可得: $$\frac{l_d}{\sin{\left(2\alpha\right)}}=\frac{R}{\sin{\left(\frac{\pi}{2}-\alpha\right)}}$$
化简得: $$R=\frac{l_d}{2\sin{\left(\alpha\right)}}$$
根据车辆的运动学方程,有: $$\delta=\tan^{-1}{\frac{L}{R}}$$
所以,前轮转角为: $$\delta=\tan^{-1}{\frac{2L\sin{\left(\alpha\right)}}{l_d}}$$
定义横向误差为后轮中心位置和预瞄点在横向上的误差,如上图中的$e_y$ $$e_y=l_d\sin{\left(\alpha\right)}$$
$$sin{\left(\alpha\right)}=\frac{e_y}{l_d}$$
当前轮转角很小是,横向误差可以近似为 $$\delta=\frac{2L}{{l_d}}\sin{\left(\alpha\right)}$$
另外对于非ackerman底盘,尤其是前后轮差距不是很大的底盘(双轮差速加万向轮),L可以与最大速度v_近似。
$$\delta=\frac{2{v_-}{e_y}}{{l_d}^2}$$
即只要确定了$l_d$,就确定了转向角
基于以上原理,算法步骤为:
1.确定车辆位置和目标点,进行坐标系转换
2.确定转向角$\delta$
3.发布速度指令,全速追踪,更新车辆位置
以下给出非ackerman底盘的pure pursuit算法核心部分具体代码:
if (!goal_reached_) {
// We are tracking.
ROS_INFO("goal_reached_");
// Compute linear velocity.
// Right now,this is not very smart :)
v_ = copysign(v_max_, v_); // max linear speed
// Compute the angular velocity.
// Lateral error is the y-value of the lookahead point (in base_link
// frame)
double yt = lookahead_.transform.translation.y;
double ld_2 = ld_ * ld_;
// v_可以与L近似,此处为核心代码
cmd_vel_.angular.z = (-1) * std::min(2 * v_ / ld_2 * yt, w_max_);
// Set linear velocity for tracking.
cmd_vel_.linear.x = v_;
ROS_INFO("here if");
} else {
// We are at the goal!
// Stop the vehicle
// The lookahead target is at our current pose.
lookahead_.transform = geometry_msgs::Transform();
lookahead_.transform.rotation.w = 1.0;
// Stop moving.
cmd_vel_.linear.x = 0.0;
cmd_vel_.angular.z = 0.0;
}
// Publish the lookahead target transform.
lookahead_.header.stamp = ros::Time::now();
tf_broadcaster_.sendTransform(lookahead_);
// Publish the velocities
pub_vel_.publish(cmd_vel_);
参考链接
https://www.mathworks.com/help/robotics/ug/pure-pursuit-controller.html