定位系统
定位系统简介
KKSWARM定位系统采用摄像头和二维码的方式获取小车的位置和方向信息。通过垂直悬挂的摄像机采集场地中贴有二维码的小车,获取其位置和方向数据,同时将数据传入到整个系统之中。供其他功能包使用。
定位系统功能包
定位系统相关功能包如下:
-
camtoros:该功能包为海康威视工业相机的ROS驱动-
发布话题:
-
/hik_camera/image_raw [sensor_msgs/Image]
原始图像数据
-
/hik_camera/camera_info [sensor_msgs/CameraInfo]
相机内外参数
-
-
-
apriltag_ros- 发布话题:
-
/tag_detections [apriltag_ros/AprilTagDetectionArray]
标签检测
-
/tag_detections_image [sensor_msgs/Image]
检测到标签的图像数据
-
/tf
坐标变换数据
-
- 订阅话题:
-
/hik_camera/image_raw [sensor_msgs/Image]
-
/hik_camera/camera_info [sensor_msgs/CameraInfo]
-
- 发布话题:
-
global_vision:定位系统主要功能包。用于发布图像定位数据-
发布话题:(x表示小车编号)
-
/robot_x/cmd_vel [geometry_msgs/Twist]
每一辆小车的速度
-
/robot_x/pose [nav_msgs/Odometry]
每一辆小车的位置
-
-
订阅话题:
-
/tf
坐标变换数据
-
/comm [kkswarm_msgs/Carstate]
小车状态信息
-
-
-
tcp_communication:TCP通信功能包。用于获取上层和底层直接的通信- 发布话题:
-
/comm [kkswarm_msgs/Carstate]
小车状态信息
-
- 订阅话题:
-
/robot_1/cmd_vel [geometry_msgs/Twist]
-
/robot_2/cmd_vel
-
...
-
/robot_10/cmd_vel
每一辆小车的速度,默认是10辆小车。单位:m/s
-
- 发布话题:
定位系统数据流向图
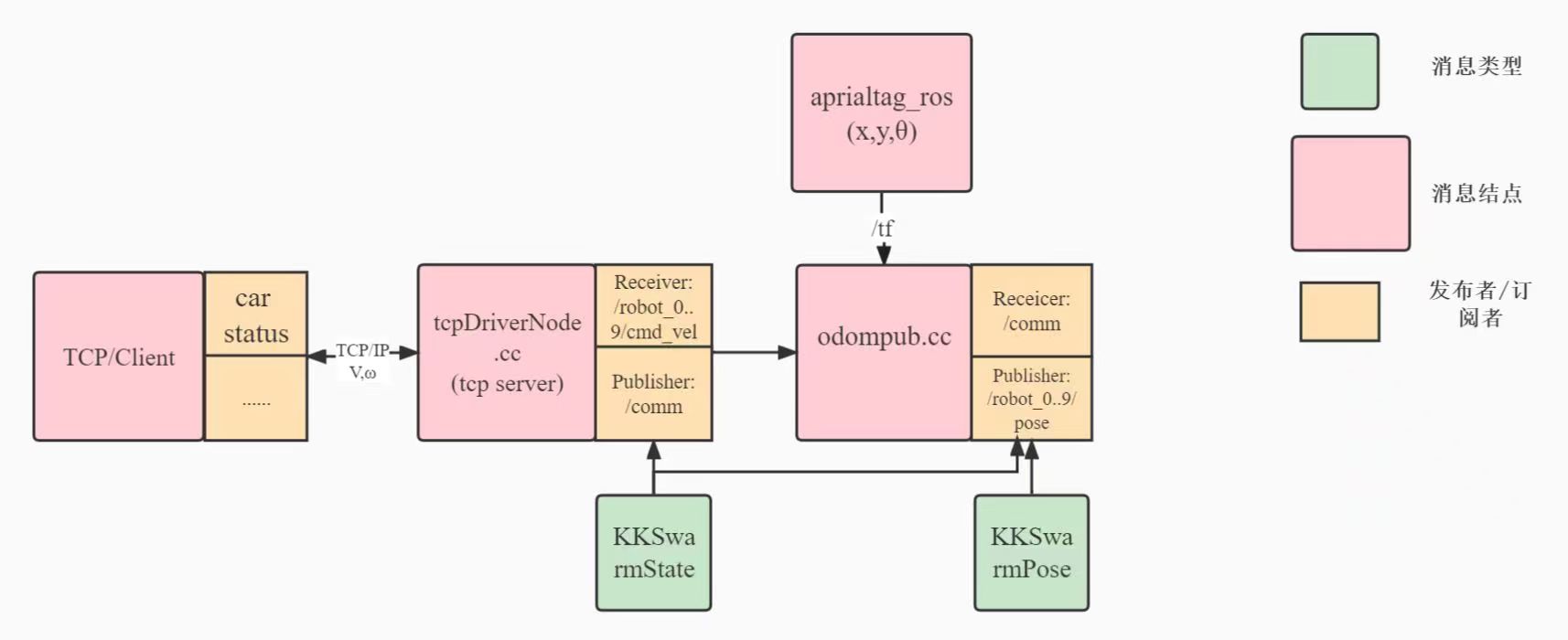
定位系统数据流向图