队形变换仿真
本教程将会引导读者完成 队形变换仿真 的演示。在使用此功能之前,确保已经完成了 仿真系统搭建
- 打开matlabR20021b,在命令行中输入
rosinit,启动ROS Master节点
rosinit
此时将会弹出ROS master 的窗口,不要关闭。最小化即可。 如图1所示:
图1 rosinit
提示
在某些电脑环境中,即使按照仿真系统搭建步骤完成搭建,在运行
rosinit时,可能会出现Cannot connect to ROS master at http://localhost:11311. Check the specified address or hostname字样。解决的办法是,将
rosinit命令改为,rosinit("ip",端口)。如下图所示: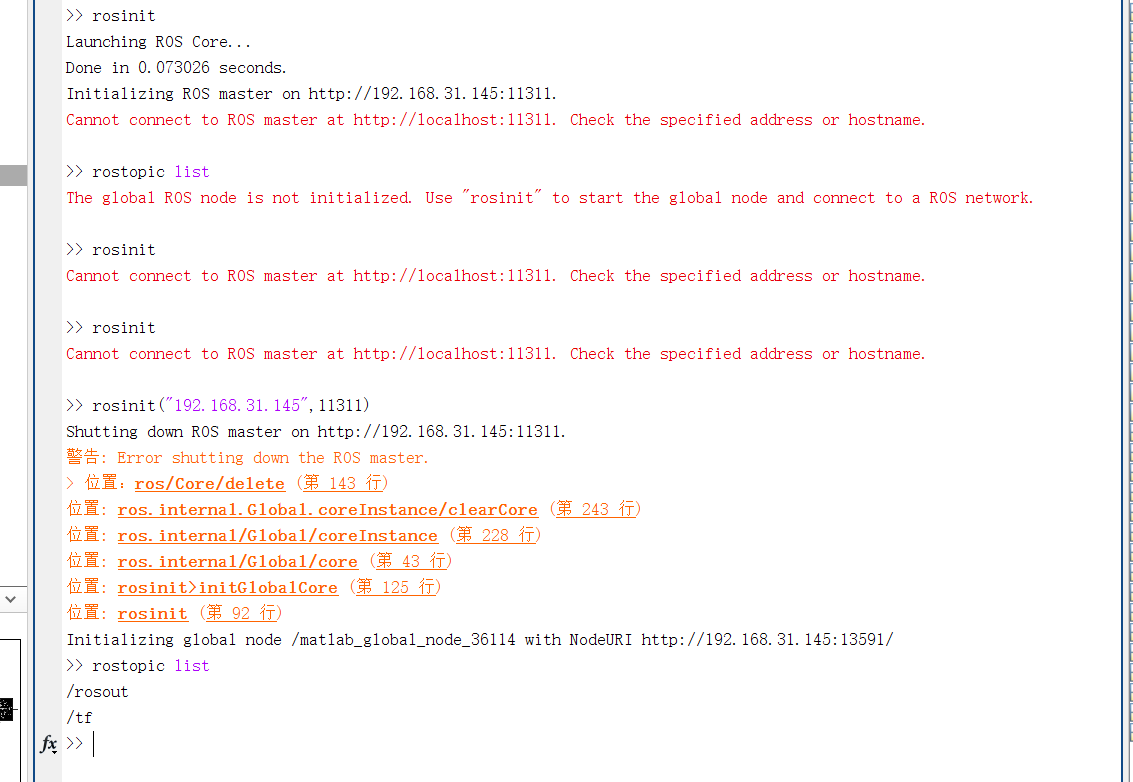
解决办法
- 打开
kk-robot-swarm/src/matlab/formation/b6_formation.slx文件,如图2所示。
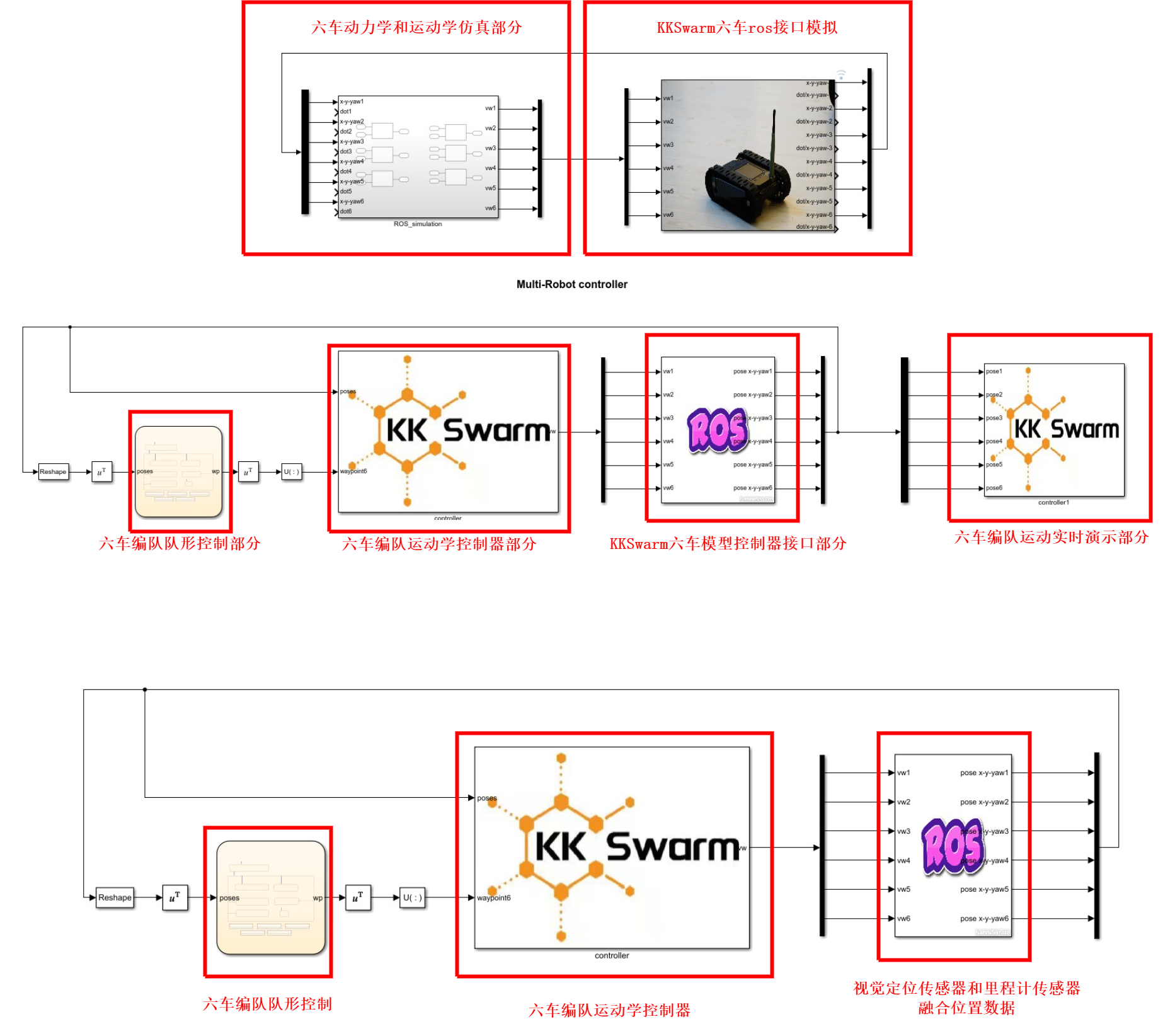
图2 b6_formation
- 接着点击菜单栏上的
仿真--运行。启动仿真
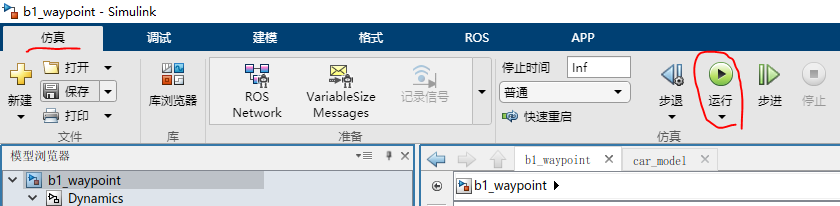
图4 b6_formation Sim
- 等待编译完成,系统将会运行仿真。如图4所示:
图5 仿真结果
集群将会按照给定的队形进行循环变化
二次开发参数说明
此 Demo 采用的是 simulink 的 stateflow 来进行多车编队的队形切换。其主要控制模块如下:
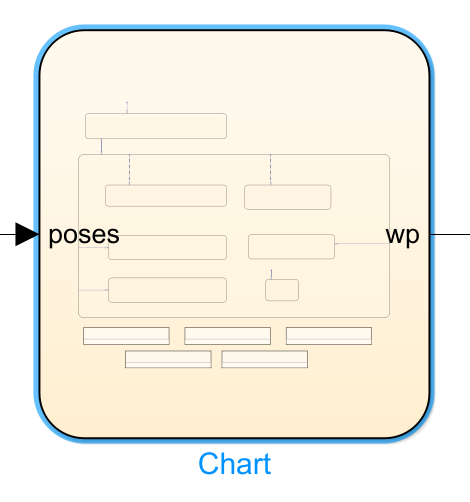
主要控制模块
双击进入以后,可以看到队形切换的逻辑。如下图所示:
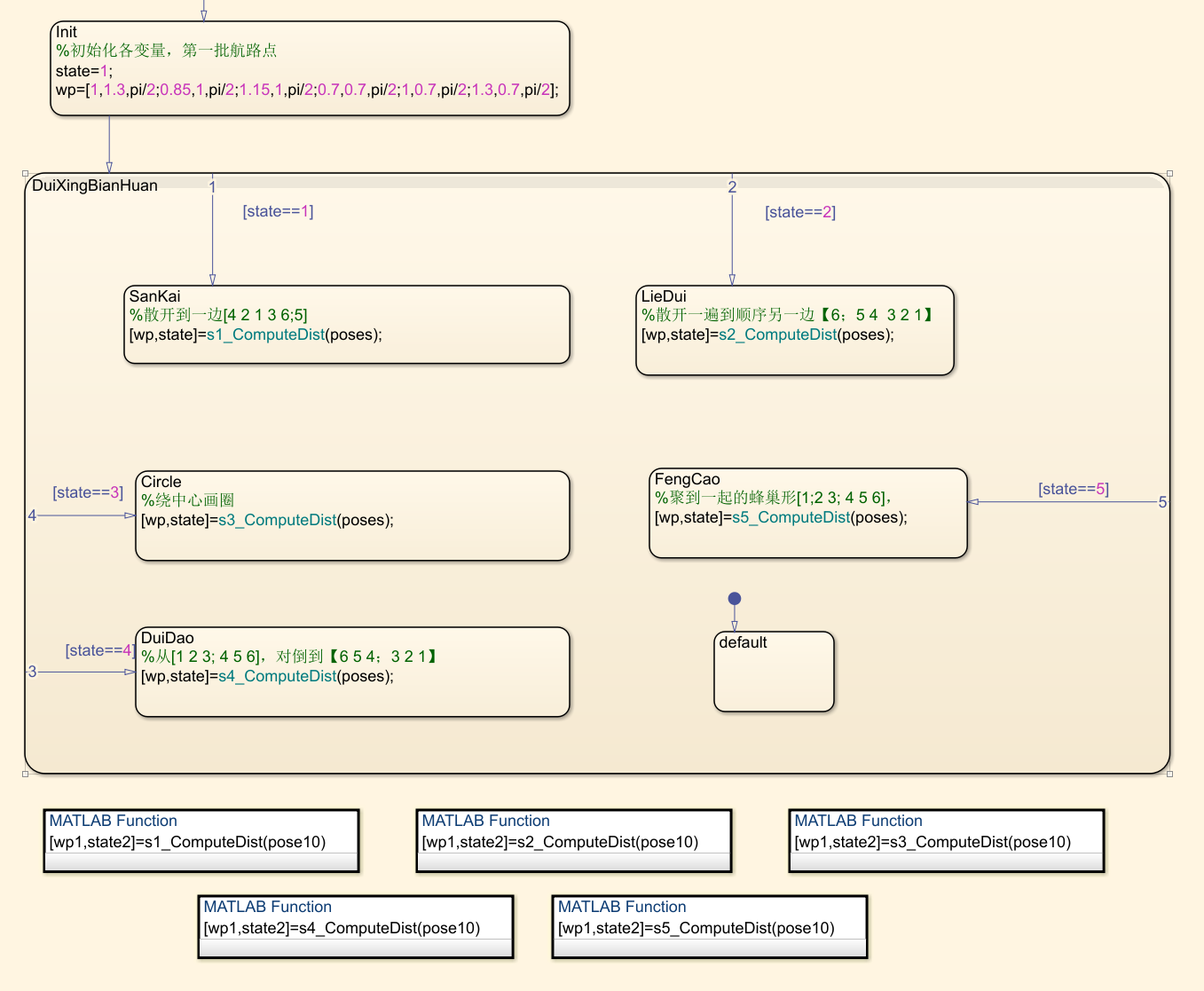
控制逻辑图
整体规划了5种队形,分别对应状态 state==1~5。 Statefow 按照状态顺序每个采样周期执行一个状态,在每个状态中会调用该状态的对应队形的航路点生成函数,这样每个采样周期都会更新一次航路点,如何到达航路点由运动学控制器负责解算,航路点生成函数负责解算当前航路点状态是否完成,完成就给出下一个航路点或者切换到下一个状态。
这种状态转移架构可以很方便进行线性扩充。详细算法参见各个航路点生成函数 [wp,state]=sn_ComputeDist(poses) 模块
一键生成ROS代码
- 首先在
b6_formation.slx文件中开发,完成想要的仿真效果,然后保存 - 打开
c6_formation.slx文件,将b6_formation.slx文件中开发的部分同等在c6_formation.slx文件中修改。
注意
- 该功能不建议直接复制
- 建议用户直接使用提供的模板
c6_formation.slx进行二次开发- 有关matlab开发文件说明,详见matlab文件说明
- 在编译代码之前,确保启动了
rosinit - 然后在菜单栏上的
ROS--Deploy to Remote Device。如图1所示
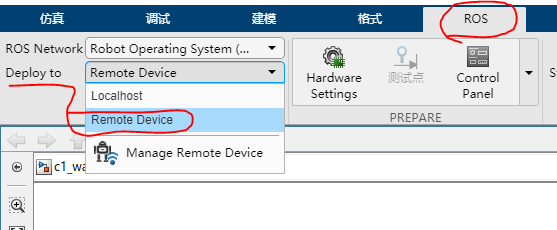
图3 生成ROS代码配置
- 然后点击菜单栏上的
ROS--Build Model--Build Model一键生成ROS代码,如图2所示
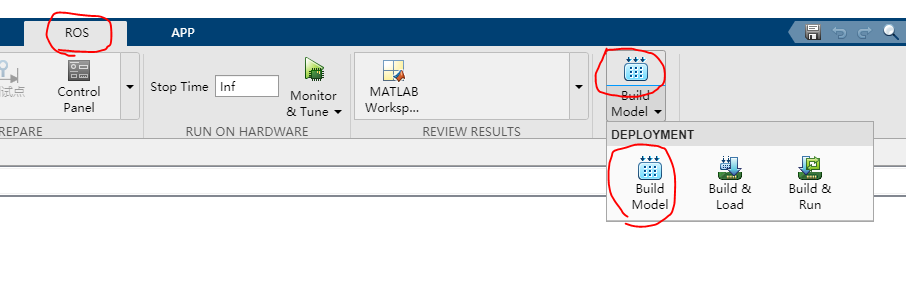
图3 生成ROS代码
-
等待编译完成以后,将会看到生成的压缩包文件
-
将生成的 ROS 代码复制到Linux系统中,并解压至
kk-robot-swarm/src/swarm/下,然后编译整个工作空间即可。